
一种巡线机器人的机械结构设计及运动学分析
2021-06-05 07:03高宏力施景皓鲁彩江
机械设计与制造 2021年5期
杨 恺,高宏力,施景皓,鲁彩江
(西南交通大学机械工程学院,四川 成都 610031)
1 引言
高压输电线路通常为裸导线,暴露于野外环境之中,长时间的风雪雷击、机械张力、电气闪络,易造成线路损伤,从而影响输电线路线路运行的安全性及稳定性[1]。为保证输电线路的安全运行,需要对其运行状况做周期性检测。目前,对架空输电线路的巡检方法主要有[2]:(1)望远镜人工检测法,但利用望远镜不易检测出细微故障,且观察不全面;(2)直升飞机航测法,该方法存在费用高、难度大、观测精度低等问题,且存在视觉死角,受气候影响明显;(3)检修工人穿上带电作业屏蔽服上线检修,但检修时巡检人员作业难度大、危险性高;(4)无人机航测法,但由于高压输电线周围的强磁场对无人机飞行控制系统的干扰,无人机无法靠近且无法环绕导线检测,存在视觉死角。相对于传统方法,输电线路巡线机器人具有安全性好、工作效率高等优点,因此可以利用其取代传统方式,以提高检测精度和检测效率。而当前,已有的巡线机器人尚有重量大,持续作业时间短的不足,且可跨越障碍物种类较少,尤其不能跨越耐张塔间的跳线,均降低了使用巡线机器人进行巡检的可行性[3]。基于此,设计了一种可以跨越线路上包括跳线在内的常见结构化障碍物的轻量化自主越障巡线机器人,以期达到增加机器人巡检范围,提升巡检质量的目的。
2 巡线机器人机械结构设计
2.1 线路运行环境分析
拟设计一种适用于110kV 高压输电线路的轻量化自主越障巡线机器人,要求其能够自主跨越输电导线上的常见结构化障碍物并代替人工完成线上巡检工作。
110kV 输电线路上的主要障碍物有悬垂线夹、绝缘子串、防振锤、直线跳线与直角跳线。由于我国地理条件复杂,环境多变,高压输电线路的布置经常需要跨越江河湖泊与深山密林,因此巡线机器人的作业难度进一步增大[4]。
2.2 巡线机器人结构分析
根据110kV 架空输电线路的环境特点,设计了一种轻量化可自主越障的巡线机器人,机器人机械结构三维模型,如图1 所示。

图1 巡线机器人总体三维模型图Fig.1 Three-Dimensional Model of the Inspection Robot
该巡线机器人机械结构部分主要由机械臂、手爪以及底部旋转机构组成。两机械臂的末端分别通过蜗轮蜗杆电机与手爪相连,两机械臂之间通过底部旋转机构相连。机器人整体即为一个越障机构,当机器人进行越障作业时,两机械臂之间协同运动,调整机器人姿态。
机器人手爪包括行走机构、防坠机构、电磁能量采集机构,机器人手爪三维模型图,如图2 所示。行走机构主要由一个主动轮,两个从动轮组成,其中主动轮由轮毂电机提供驱动,前后两侧从动轮的布置增加了行走机构与输电导线的接触面积,使其能更平稳地在线上爬行。防坠机构主要由布置在行走机构左右两侧的张紧轮与夹紧机构组成,其收缩均由丝杠机构控制。张紧轮的作用主要是为行走机构在线上行走时提供正压力,增大行走轮与导线之间的摩擦,提升爬坡性能,而夹紧机构则在机器人越障时将一只越障臂与导线锁紧防止其摇晃甚至坠落。电磁能量采集装置在安装磁芯后可通过电磁感应原理采集输电线上的电能,与机器人电池管理模块相互协调作为自取电模块,增加巡线机器人的线上续航能力。

图2 机器人手爪三维模型图Fig.2 3D Model of the Robotic Claw
3 机器人越障运动学分析
在越障作业阶段,巡线机器人需要调节整个机器人的姿态来实现越障任务,而机器人的位置与姿态又由5 个旋转关节决定,因此有必要对机器人的越障运动进行运动学建模,并进行相应的运动学分析。
3.1 机器人越障步态分析
巡线机器人越障步态分析是机器人运动学分析的基础[5]。现有的巡线机器人可以跨越的障碍物种类较少,只能越过线路上的金具类障碍物,包括悬垂线夹、防振锤、耐张线夹等,而不能跨越耐张塔间的跳线,大大限制了机器人的作业范围[6]。设计的巡线机器人则具有跨越跳线的能力,而直角跳线为跳线中的跨越难度最大的一种情况,故特以直角跳线为例,对巡线机器人的越障动作进行分析。机器人跨越直角跳线的步骤,如图3 所示。
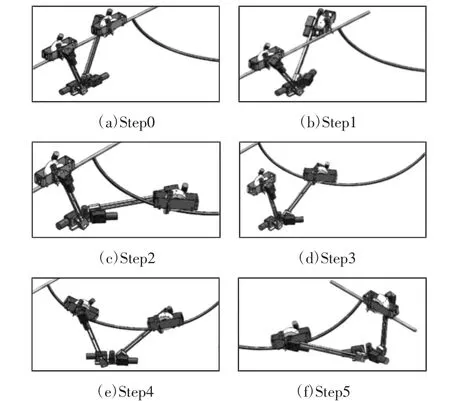
图3 机器人跨越直角跳线步骤图Fig.3 The Step Diagram of the Robot Crossing the 90° Jumper
Step 1:机器人在跳线前方停下后,后臂上的夹紧机构将机器人与导线夹紧固定,防止其在越障过程中晃动,同时前臂行走模块与导线分离。
Step 2:机器人底部旋转机构旋转一定角度,使越障前臂与原导线及跳线均错开一定距离。
Step 3:机器人后臂行走机构驱动机器人缓慢向前行进,当越障前臂到达抓线点后停止前进。
Step 4:机器人腕部电机、底部旋转电机与肩部电机相互协同运动使行走机构准确地实现抓线操作。
Step 5:越障后臂上夹紧机构松开与导线之间的约束,而后越障后臂重复上述Step 1 至Step 4,使机器人越障后臂越过直角跳线并重新抓线。
3.2 机器人运动学模型的建立
当遇到障碍物时,机器人越障后臂上的锁紧机构将其与导线锁紧,此时越障后臂不能转动。以越障后臂下放的转动关节为基坐标系进行D-H 建模[7]。
巡线机器人在越障时是一个四自由度结构,所有关节均为转动关节。巡线机器人越障时的D-H 模型,如图4 所示。根据该模型得到机器人的D-H 参数,如表1 所示。
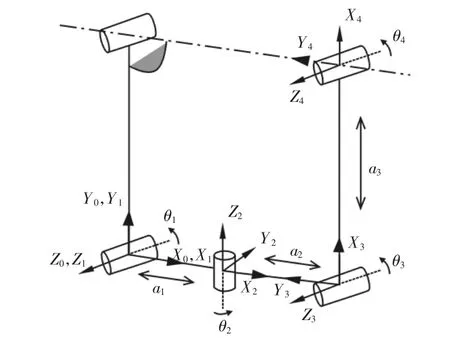
图4 机器人越障D-H 模型Fig.4 D-H Model of Robot

表1 D-H 连杆坐标系的参数表Tab.1 Parameter Table of D-H ConnectingRod Coordinate System
3.3 运动学分析

方程(5)构成该巡线机器人的运动学方程。
3.4 运动学模型的验证
为了验证上述正运动学分析的正确性,在Matlab Robotics工具箱中对巡线机器人进行运动学建模[8],并引入实例分别代入3.3 节中得到的运动学方程与Robotics 工具箱中进行计算,通过比较两种方法求得的结果是否一致判断运动学模型是否正确。
对各关节变量进行赋值:θ1=π/9,θ2=π/2,θ3=π/3,θ4=0;代入式(4)后运用Matlab 计算得到机器人越障时前臂相对于基坐标系的位姿参数为:r11=-0.2962,r12=-0.1710,r13=-0.9397,px=-79.9164;r21=0.8138,r22=0.4698,r23=-0.3420,py=416.0480;r31=0.5000,r32=-0.8660,r33=0,pz=308.7000。
根据D-H 参数在Matlab Robotics 工具箱中对巡线机器人进行运动学建模,机器人Robotics 工具箱运动学模型,如图5 所示。使用SerialLink.fkine()函数进行正运动学分析,求出在给定上述变量值的情况下,机器人越障时前臂相对于基坐标系的位姿矩阵为[9]:

图5 机器人Robotics 工具箱运动学模型Fig.5 The Robotics Toolbox Kinematics Model of Robot
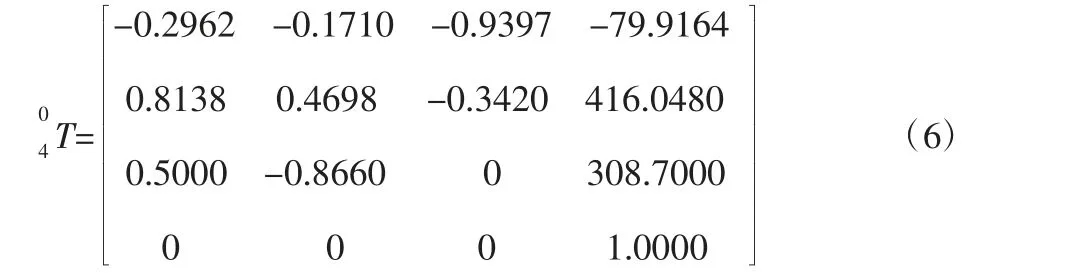
将运动学方程的解与Robotics 工具箱中求得的结果进行对比可知,两种方法求得的结果一致,使用D-H 方法与Robotics 工具箱建立的运动学模型均是正确的。
3.5 运动学仿真
为了验证巡线机器人在越障过程中有无刚性、柔性冲击以及碰撞发生,需在Robotics 工具箱中对机器人进行运动学仿真。由巡线机器人越障步态可知,机器人的初始关节变量为θ0=[0 0 π/2 0],终止位置的关节变量为θ1=[π/9 π/3 π/3 0]。基于上节中建立的运动学模型,使用Robotic 工具箱中的jtraj()函数构建由初始位置到终止位置的运动轨迹并使用plot()函数生成巡线机器人各个关节的位移、速度、加速度曲线,机器人各越障关节运动参数曲线,如图6 所示。
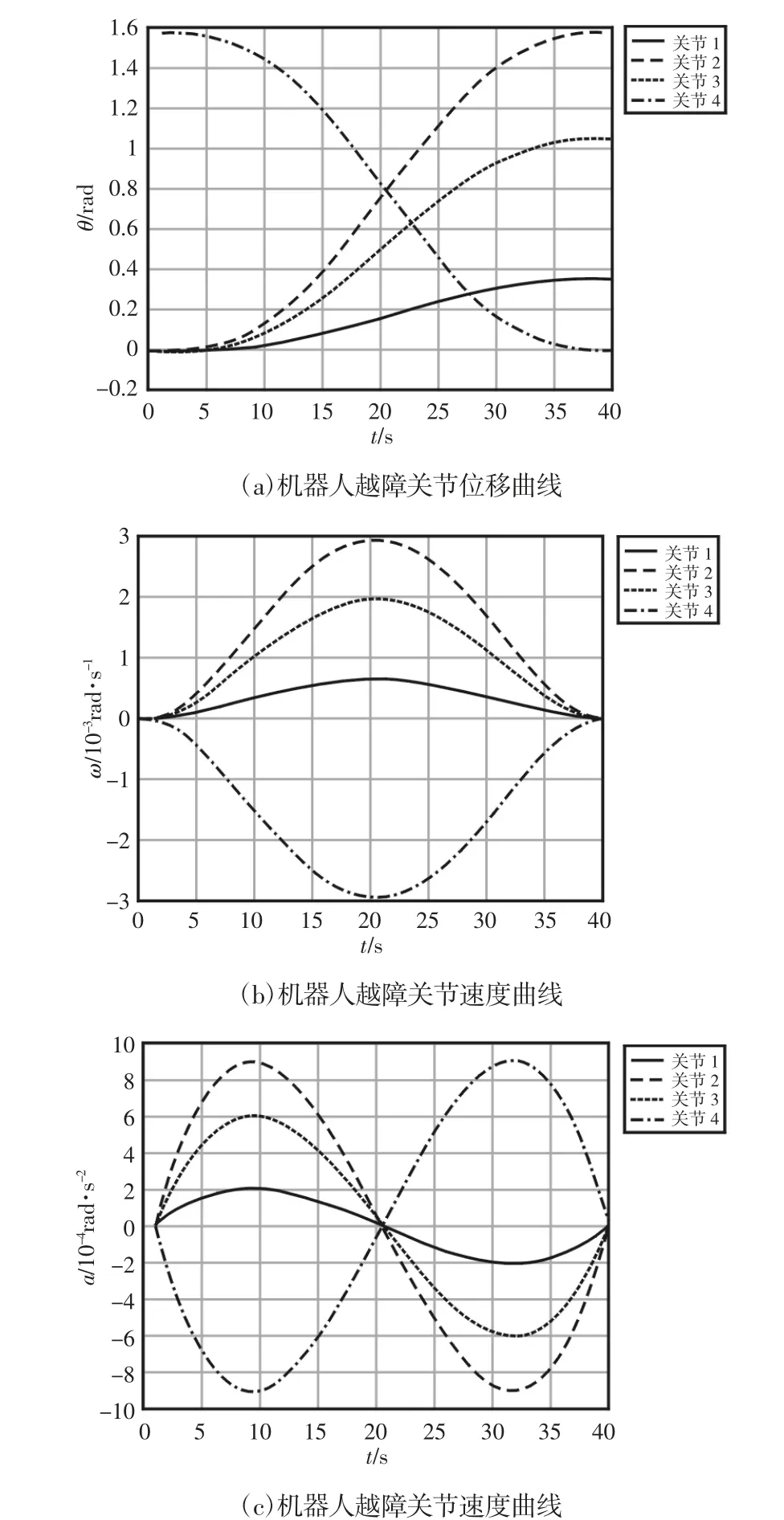
图6 各越障关节运动参数曲线Fig.6 Motion Parameter Curve of Each Obstacle Crossing Joint
根据上述机器人越障关节运动参数曲线可知,机器人各关节运行均平稳顺利,不存在奇异点,说明巡线机器人在越障过程中无碰撞发生,无刚性、柔性冲击,证明机器人各连杆参数及越障步态设计合理。
4 结论
为了通过使用机器人巡检的方法来降低110kV 输电线路巡检的难度及成本,设计了一种双臂结构的轻量化自主越障巡线机器人,提出了一种能够越过输电线上常规结构化障碍物以及跳线的越障方法,并针对其越障过程进行运动学分析及运动仿真。分别使用标准D-H 方法与MatlabRobotics 工具箱运动学建模的方法对机器人进行运动学分析,并引入实例验证文章运动学分析的正确性。最后,为了得到机器人在越障过程中各关节的运动参数,使用Matlab Robotics 工具箱进行运动仿真。仿真结果表明巡线机器人在越障过程中无碰撞发生且各关节之间不中存在刚性冲击与柔性冲击,证实了机器人运动结构以及越障步态的合理性。
猜你喜欢
农业装备与车辆工程(2021年8期)2021-08-28
中国电业与能源(2021年4期)2021-05-22
南方农机(2021年1期)2021-01-20
港口装卸(2020年3期)2020-06-30
广西电业(2020年11期)2020-03-23
现代营销·理论(2019年10期)2019-09-10
无人机(2018年1期)2018-07-05
山东电力高等专科学校学报(2018年2期)2018-05-10
四川电力技术(2017年1期)2017-03-16
电测与仪表(2015年3期)2015-04-09
