
两关节绳驱式欠驱动手爪设计与仿真分析
2021-06-05 07:03王远行刘玉旺朱树云杨尚奎
机械设计与制造 2021年5期
王远行,刘玉旺,朱树云,杨尚奎
(1.中国科学院沈阳自动化研究所机器人学国家重点实验室,辽宁 沈阳 110016;2.中国科学院机器人与智能制造创新研究院,辽宁沈阳 110016;3.中国科学院大学,北京100049)
1 引言
欠驱动机构即是机构的驱动源少于机构自由度一种机构,因而在欠驱动机构抱持物体的过程中,存在未被控制的自由度,抱紧机构未被驱动的自由度能够很好的适应物体形状,达到自适应的效果[1-2]。同时欠驱动机构具有结构简单,控制方便,驱动源较少,因而其应用范围越来越广泛。
欠驱动手爪按照传动方式的不同可以分为连杆机构、腱—滑轮机构,齿轮链传动机构,每种机构都具有各自的优缺点和应用范围[3-4]。选择腱—滑轮传动形式的欠驱动手爪作为攀爬机器人的抱持机构。此抱持机构是采用两指两关节的结构形式,是一种拟人灵巧手的结构,每个手指均有一根钢丝绳进行驱动,因而很容易实现抱持机构的欠驱动形式。除了绳驱式欠驱动机理所带来的自适应性,由于钢丝绳本身具有一定的弹性,在受力时会产生一定程度的弹性变形,从而带来了更好的自适应性。因而此机构作为攀爬机器人的抱持机构能够满足机器人本体对抱持机构的性能要求。
对绳驱式欠驱动手爪进行运动学和动力学的仿真,能够验证两指两关节手爪抱持的可行性,从仿真的角度验证绳驱式欠驱动手爪作为攀爬机器人抱持机构的可行性。传统的钢丝绳的建模仿真方法包括离散柔体建模、宏命令建模,模态中性文件建模。上述三种方法在绳驱式欠驱动手爪的仿真中,均具有一定的局限性,并且建模过程相对复杂。采用了多体动力学软件ADAMS 中的Cable 模块对绳驱式的欠驱动手爪进行运动学和动力学的仿真。具有仿真效率高,仿真过程简便的特点,为绳驱式欠驱动手爪的仿真研究提供了一种新的研究思路。
2 绳驱式欠驱动轮手模型建立
2.1 原理构思
绳驱式欠驱动手爪作为攀爬机器人的抱持机构,使攀爬机器人在攀爬的过程中能够附着在杆件上。因而手爪在抱持杆件过程中,必须使机器人本体与杆件之间有一个正压力,正是此正压力提供了攀爬机器人攀爬的驱动力。正是由于攀爬机器人抱持机构所具有的抱持特点,提出一种绳驱式欠驱动手爪的构思[5],如图1 所示。
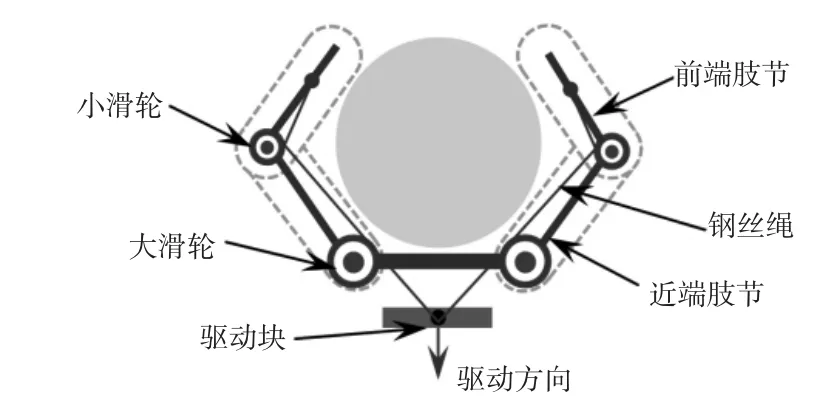
图1 欠驱动手爪原理示意图Fig.1 Schematic Diagram of Underactuated Gripper
2.2 模型建立
由图2 可知攀爬机器人的抱持机构由两个手指组成,每个手指上具有两个肢节,每个关节处安装有半径大小不同的滑轮,钢丝绳的一端固定在前段肢节上,然后缠绕在小滑轮上,并在同一方向缠绕在大滑轮上,最终固定在滑块上,当滑块朝一个方向移动时,钢丝绳收缩,从而使手爪完成抱持动作,能够满足攀爬机器人对于抱持机构的性能要求。以此原理图建立的攀爬机器人抱持机构的简化模型,如图2 所示。
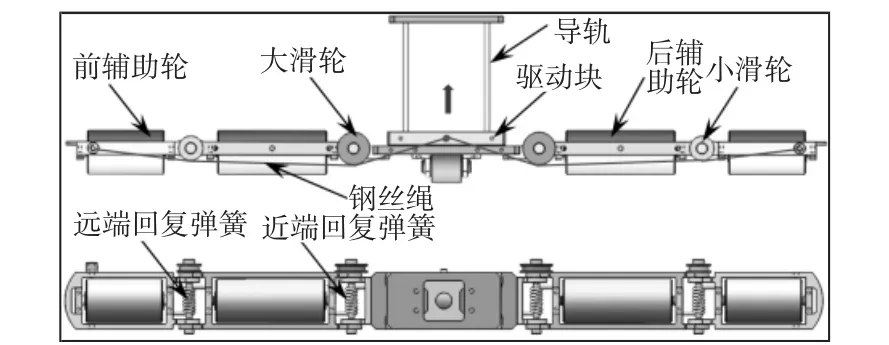
图2 绳驱式欠驱动手爪的三维模型Fig.2 Three-Dimensional Model of Rope-Driven Underactuated Gripper
此欠驱动手爪是攀爬机器人的抱持机构,为了辅助手爪在抱持杆件的过程中能够辅助机器人爬行,因而每个肢节上装有辅助轮,为了能使手爪按照预先设定的抱持动作,在两个关节中间装有刚度不同的回复弹簧,以使手爪能够按照预先设定的形状抱持杆件。
3 静力学模型建立
在绳驱式欠驱动机构中,手指与物体的接触力除了与自身的设计参数如肢节长度、回复弹簧的刚度、滑轮的半径、被抓取物体的形状及尺寸等因素有关系外,还直接由钢丝绳的驱动力决定[6]。当欠驱动轮手在抱持圆形杆件时,稳定状态时的受力状态,如图3 所示。
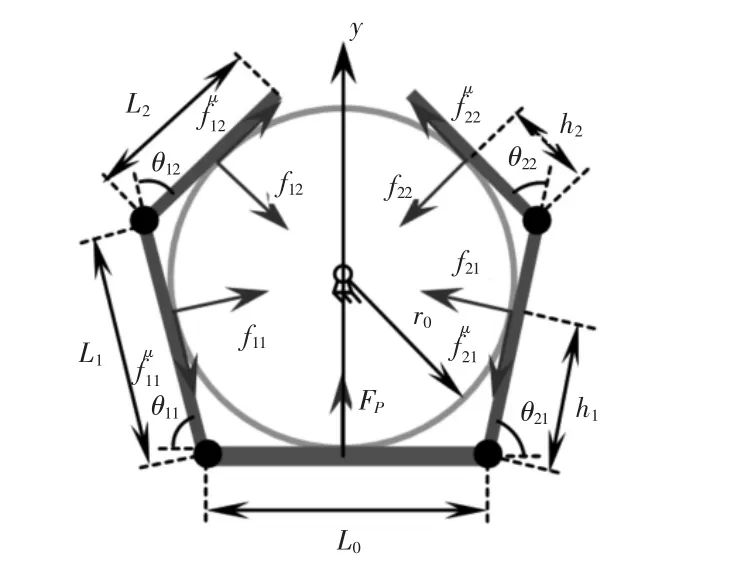
图3 抱持稳定时手爪的受力状态Fig.3 The Force State of the Gripper in Grasping Stability
根据虚功原理可以得到驱动力矩和各肢节接触力的关系式:

式中:t—由驱动器和两指节间弹性元件产生的输入转矩矢量;wa—相应关节的角速度矢量;ξi—指节i 上接触点的运动螺旋(假设每直接只有一个接触点);ζi—指节i 上接触点的力螺旋;运算符*—指运动螺旋和力螺旋在平面内的互逆积。因而对于两肢节绳驱式欠驱动机构可以得到:
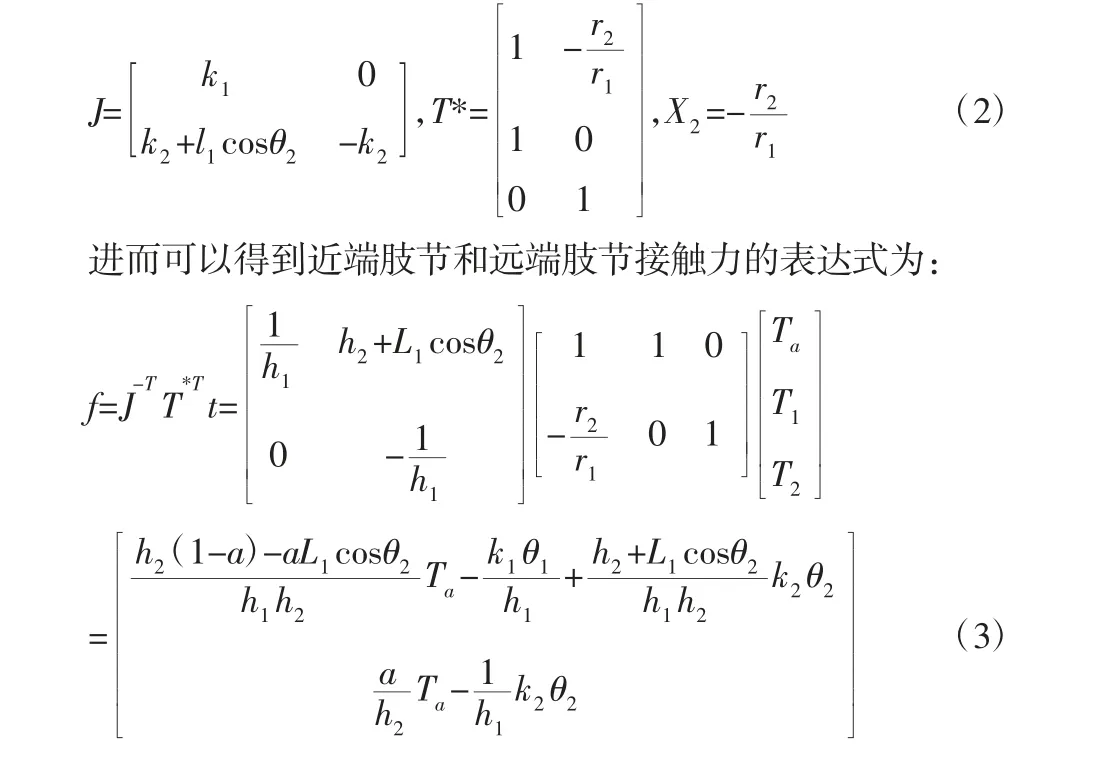
式中:Ta—驱动扭矩;T1=k1θ1—回复弹簧1 产生的扭矩;T2=k2θ2—回复弹簧2 产生的扭矩;θ1,θ2—关节1、2 的转角;k1,k2—回复弹簧1、2 的刚度;h1,h2—各肢节与物体肢节的接触力;α—两关节处滑轮的半径比。
因为设计的绳驱式欠驱动手爪是对称式的结构,在稳定抱持杆件以后,左右手指对应肢节上的接触力和摩擦力是对应相等的,因而根据静力分析可以得到攀爬机器人本体与杆件之间的接触力为:

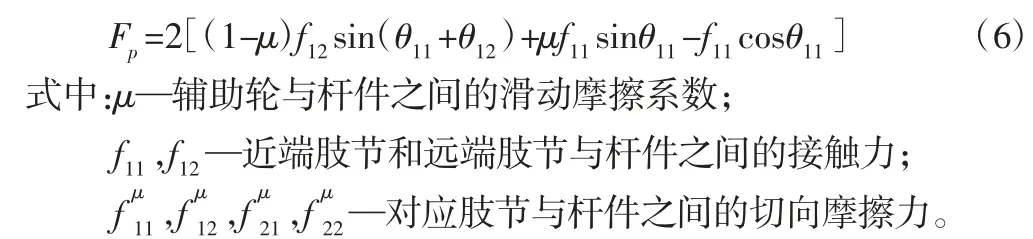
此节建立了欠驱动抱持机构的静力学模型,从此静力学模型中可以得出抱持稳定时各肢节、中间辅助轮与杆件之间的接触力与各参数之间的关系。对于本设计的欠驱动手爪而言,所有的量都是固定的,因而在抱持过程中,手爪的接触力只由被抱持杆件的半径r0和驱动力决定。
静力学模型的建立,为欠驱动抱持机构的设计提供了理论上的支持,并且所涉及的杆件与辅助轮之间的正压力Fp的大小是攀爬机器人攀爬能力的一个重要体现,因而此模型的建立又为攀爬机器人的整体设计提供了理论支持。
4 基于ADAMS 的仿真分析
对欠驱动手爪进行仿真分析不仅能够验证手爪作为攀爬机器人抱持机构抱持杆件的可行性,同时也可以验证在抱持稳定以后手爪接触力模型的正确性。这些参数对于攀爬机器人整体的研究所具有非常重要的作用。由于设计的手爪是采用钢丝绳进行驱动的,属于柔顺体仿真的范畴,传统的钢丝绳建模方法比较复杂,同时仿真的时间较长,并且不容易实验钢丝绳对于滑轮的缠绕,因而不能完全反应钢丝绳实际的物理状态。为了能更好更真实的模拟钢丝绳在驱动欠驱动手爪时的真实状态,采用了多体动力学仿真软件ADAMS/Cable 进行仿真分析[7-10],具有仿真高效和仿真过程简单的特点。
4.1 虚拟样机建模
本欠驱动轮手是利用Solidworks 进行参数化三维建模的,将欠驱动轮手导入至ADAMS 并进行定义各零件的质量属性,添加零件的约束条件以及驱动。欠驱动轮手的虚拟样机模型,如图4所示,各部件之间的约束关系,如表1 所示。
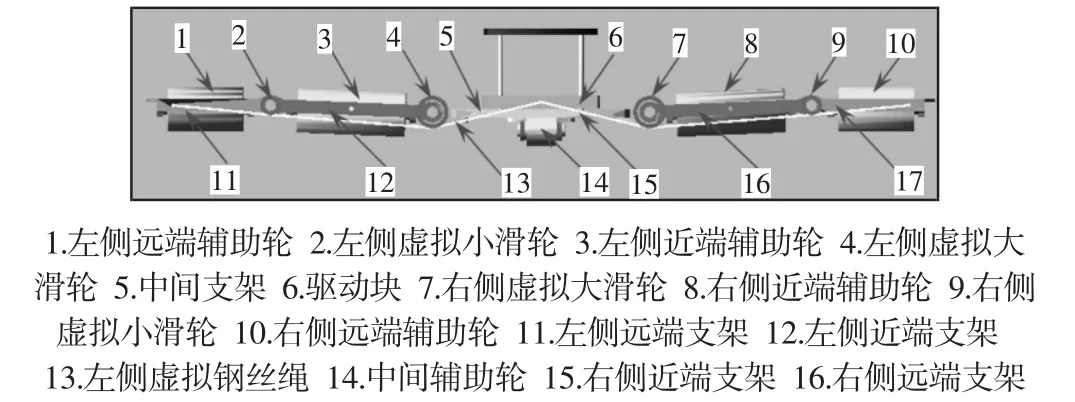
图4 欠驱动轮手虚拟样机模型Fig.4 Virtual Prototype Model of Underactuated Wheelhand
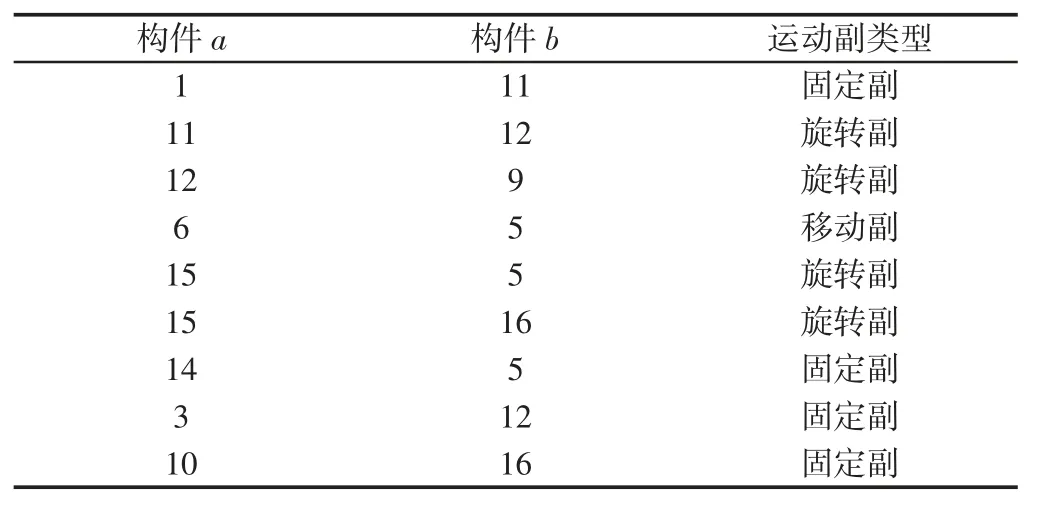
表1 欠驱动轮手主要部件约束关系Tab.1 Constraint Relation of Main Components of Underactuated Wheelhand
4.2 钢丝绳驱动系统建模过程
利用ADAMS Machinery 模块中Cable 工具激活钢丝绳系统创建向导,采用简化方法创建由Anchor、Pulley 及Cable 组成的欠驱动轮手钢丝绳驱动系统参数化模型。仿真的目标强调在钢丝绳的驱动下手指的运动效果以及稳定状态下接触力和关节转角,因而是此钢丝绳驱动系统忽略了钢丝绳的力量以及与滑轮和其他部件的摩擦力。Cable 的钢丝绳建模过程如下:
(1)建立锚固Anchor,主要是设置钢丝绳的锚固位置,钢丝绳锚接的部件以及锚固的位置和数量。
(2)创建滑轮Pulley:此功能是用来创建滑轮布局的和接触参数的,其中滑轮的布局包括滑轮的安装位置、滑轮的旋转方向、滑轮的直径以及滑轮的属性;接触参数主要包括连接类型和连接部件,连接类型是滑轮和连接部件连接的运动副类型,为旋转副。本钢丝绳驱动系统包括4 个滑轮,分别位于各关节旋转中心处。
(3)钢丝绳创建:此模块用于设置钢丝绳驱动系统中钢丝绳的锚接位置和缠绕滑轮的顺序,以及设置钢丝绳本身所具有的参数,以及仿真的方法和求解器。其锚接位置和缠绕顺序,如图4 所示。在仿真过程中钢丝绳要始终与滑轮处于不脱离的状态,采用简化仿真的方法,使用自动求解器进行求解。
4.3 载荷施加
接触力的施加:在肢节与杆件之间施加接触力,就可以仿真出每个肢节与杆件之间的接触力变化。关节的扭转力:在两个关节之间添加扭转弹簧,就是替代欠驱动手爪结构中回复弹簧的作用,不仅能够仿真出关节转角与扭转力的关系,并且可以测的关节转角随仿真时间的变化关系。驱动力:驱动力是施加在驱动块上的力,正是由于驱动力的作用使钢丝绳收缩,最终驱动手爪的完成抱持。并且此驱动力采用STEP(time,0,0,1,270)函数进行控制。
4.4 仿真结果分析
在完成模型的建立,各构件约束关系的添加,钢丝绳驱动系统的建立,载荷的施加以后,就可以进行整个仿真过程了。通过仿真可以得到手爪的运动过程,如图5 所示。手爪肢节的接触力,关节转角随时间的变化关系,如图6、图7 所示。
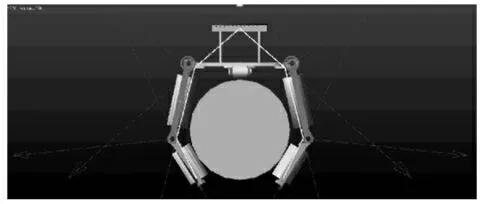
图5 ADAMS 仿真运动过程Fig.5 ADAMS Simulation of Motion Process
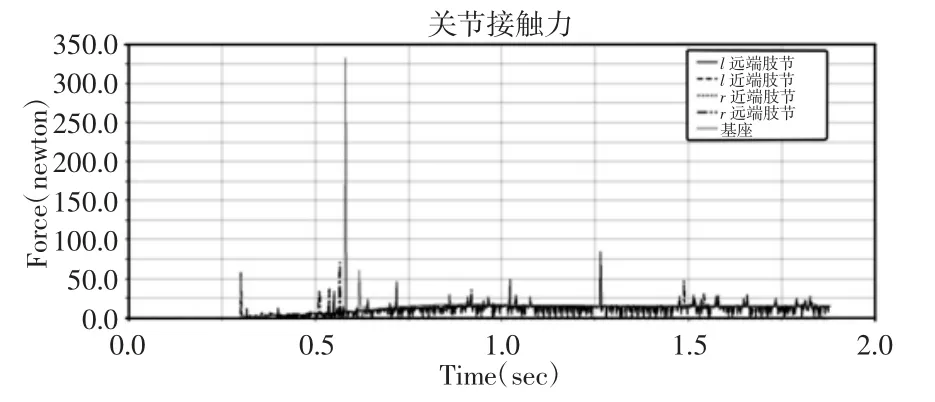
图6 肢节与杆件接触力变化关系Fig.6 The Change of Contact Force between Joints and Bars
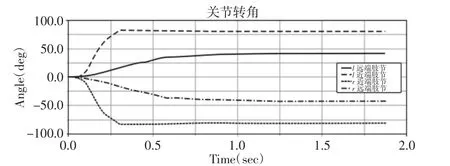
图7 关节转角变化关系Fig.7 Change of Joint Rotation Angle
从仿真的结果可以得出,绳驱式欠驱动手爪在驱动力的作用下可以完成预期的抱持动作,并且能够达到抱持稳定状态。并且在抱持稳定状态下,肢节与杆件之间的接触力和关节转角也达到了恒定。该仿真验证了欠驱动手爪作为攀爬机器人抱持机构的可行性,并且能够提供攀爬机器人攀爬时所需要的正压力,从而验证了绳驱式欠驱动手爪模型在结构设计原理的正确性。
4.5 仿真方法实验验证
在欠驱动抱持机构关节处安装电位计,对其关节转角进行实时测试。在每个辅助轮支架的压块下安装有金属应变片,对抱持过程的接触力进行测量。通过抱持实验可以得出抱持机构在抱持过程中各个肢节的运动与仿真过程一致,从而验证仿真方法的正确性,如图8 所示。

图8 抱持机构抱持实验Fig.8 Holding Mechanism Experiment
5 结论
(1)利用绳驱式欠驱动原理,为攀爬机器人设计了一种两指两肢节的欠驱动抱持机构,具有结构简单,自适应性强的特点。
(2)利用虚功原理,得到抱持稳定时各肢节和杆件之间接触力关系,建立欠驱动抱持机构的静力学模型。为研究欠驱动抱持机构和攀爬机器人提供理论支持。
(3)利用ADAMS/Cable 插件对绳驱式欠驱动抱持机构进行运动学和动力学仿真,为绳驱式欠驱动手爪提供了一种新的仿真方法。
猜你喜欢
小猕猴学习画刊(2022年11期)2022-11-26
四川建筑(2021年1期)2021-03-31
建筑机械化(2020年7期)2020-08-15
装备制造技术(2019年6期)2019-08-15
电子制作(2018年24期)2019-01-03
荣誉杂志(2017年7期)2017-08-23
科技创新与品牌(2016年8期)2016-09-29
工程建设与设计(2016年1期)2016-02-27
