
基于蝙蝠算法优化支持向量机的滚动轴承故障诊断
2021-06-04 07:51罗源睿王海瑞
化工自动化及仪表 2021年3期
罗源睿 王海瑞
(昆明理工大学信息工程与自动化学院)
滚动轴承在电力、冶金及航空等领域的应用非常广泛,尤其是在旋转机械设备上,是不可或缺的部件之一。然而大多数机械设备发生故障都与滚动轴承密切相关,因此对滚动轴承的故障诊断研究具有十分重要的意义[1]。
由于滚动轴承是最易损的部件之一,且出现故障时的振动信号多呈现非线性、非平稳性[2]。因此Wu Z H等提出了集成经验模式分解(Ensemble Empirical Mode Decomposition,EEMD)方法[3,4],通过在每次信号分解的过程中添加高斯白噪声,在有效滤除噪声影响的同时也解决了分解中存在的模态混叠现象。
支持向量机(Support Vector Machines,SVM)在故障诊断方面的应用很广泛,对于解决小样本、非线性及高维特征等问题具有很好的识别能力[5,6]。但SVM中核函数参数σ和惩罚参数C往往依靠人为经验来选取,其值的大小对SVM的识别准确率尤为重要。近年来,群智能算法在优化SVM参数方面取得了很大的进展,其中蚁群算法[7]、遗 传算法[8]及 粒子群 算 法[9,10]等 应 用 广 泛。笔者采用蝙蝠算法[11](Bat Algorithm,BA)来优化SVM参数,实验结果证明了该方法能获得更高的识别率和较好的性能。
1 EEMD
1.1 EEMD的基本原理
EEMD是在经验模式分解(Empirical Mode Decomposition,EMD)的基础上改进得到的[12]。通过在EMD分解信号中加入高斯白噪声并进行多次分解求均值,使信号在不同尺度上具有连续性,不仅能有效滤除噪声对信号的影响,还抑制了EMD分解中存在的模态混叠现象[13],具体步骤如下:
a.首先在原始信号x(t)中多次加入高斯白噪声ni(t),则第i次加入高斯白噪声后的信号xi(t)=x(t)+ni(t);

通过EEMD分解可将任意非线性、非平稳的信号分解成若干个模态函数分量IMF和一个残余分量。各个IMF分量代表了信号在不同频率范围内所包含的成分,不同的信号不同频率范围内所包含的成分不同,能量分布也不同。图1、2分别为采集到的滚动轴承内圈故障振动信号和该振动信号EEMD分解后的结果,可以看出分解得到了12个IMF分量和1个残余分量。

图1 内圈故障振动信号
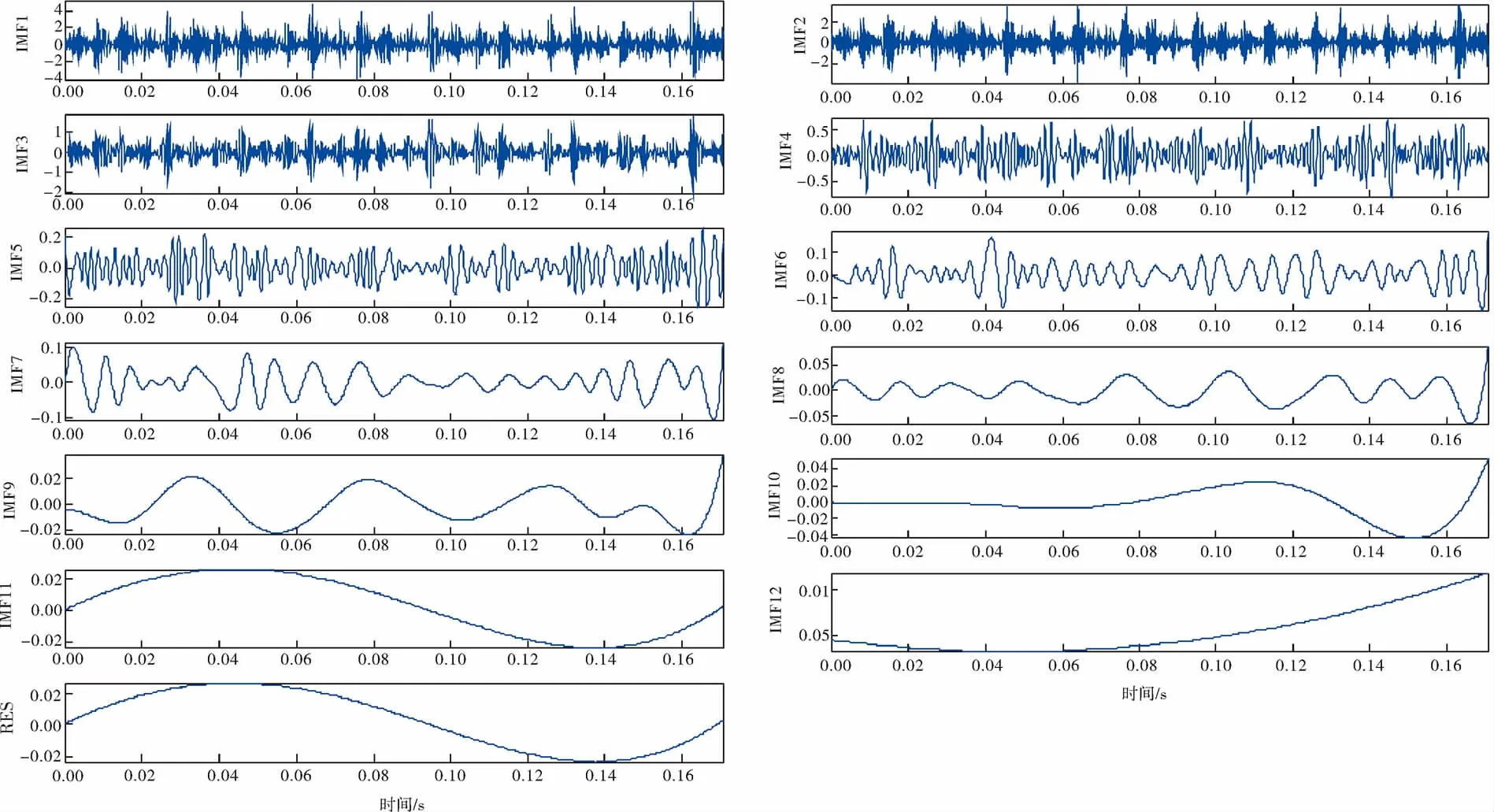
图2 内圈故障振动信号EEMD分解后的结果
1.2 EEMD能量熵
滚动轴承在不同状态下采集到的振动信号不同,其各频率分量和能量分布也会随着振动信号的改变而改变[14],因此可以根据其能量值判断滚动轴承的工作状态。
通过计算EEMD分解振动信号x(t)后,得到n个IMF分量相应的能量E1,E2,…,En,从而获得信号中的能量分布,即能量熵。在忽略残余分量的情况下,各个IMF分量的能量之和等于原信号的总能量。由于IMF的各分量c1,c2,…,cn包含不同的频率成分,且各分量具有的能量也不相同,从而形成了信号在频域的能量分布,则EEMD能量熵HEn可定义为:

滚动轴承在不同工作状态下振动信号的能量熵值如下:
正常状态 1.248 4
内圈故障 1.066 6
滚动体故障 0.919 7
外圈故障 0.769 8
从以上数据可以看出,不同状态下的能量熵值不同,正常状态下的能量熵值最大,这是因为滚动轴承在正常状态下,信号相对平稳,故能量分布较均匀、不确定性较高。当轴承发生故障时,会导致能量在一定的频率范围内集中,不确定性减少,使能量熵值也随着变小。因此可以将能量熵作为后续输入BA-SVM模型的特征向量,这样能更客观地反映轴承的状态,更好地对轴承不同故障类型进行诊断。
2 蝙蝠算法
蝙蝠算法是通过模拟蝙蝠捕食过程和躲避障碍物而演变的搜索算法,具有很好的全局寻优能力和较快的收敛速度[15]。首先蝙蝠利用声呐系统发出超声波脉冲,再通过遇到猎物或障碍物时反射回来的声波信号进行判断,并及时调整飞行方向和速度,最终有效地避开障碍物并快速捕食猎物。
假设蝙蝠算法的搜索空间为d维,蝙蝠i在寻优过程中脉冲频率fi、速度vi和位置yi在t时刻的更新公式如下:

为了确保算法的局部搜索能力,从当前最优解中随机选取一个解并对之施加一个随机扰动,然后在该解的附近进行搜索,在局部搜索阶段相应的位置更新公式为:

其中,ε表示一个随机数且ε∈[-1,1];yold表示随机选取的一个位置最优解;At表示全部蝙蝠个体在t时刻的脉冲响度均值。
在蝙蝠搜索过程中,通过判断猎物与其自身的距离,并以此为据对脉冲频度ri和响度Ai进行更新。当蝙蝠距离猎物较近时响度会逐渐降低,声波的发射频度会逐渐提高,更新公式为:

3 基于BA算法优化的支持向量机
支持向量机是一种二分类模型,核函数参数σ和惩罚参数C作为SVM中最重要的两个参数,分别影响了SVM算法的分类识别率和泛化能力。而SVM参数往往依靠人为经验选取,影响其分类性能。目前对参数σ和C的优化算法有很多,比如蚁群算法、遗传算法及粒子群算法等,但这些算法都存在易陷入局部最优、收敛能力弱等缺点,从而导致分类结果不理想。
针对上述存在的问题,笔者提出了基于蝙蝠算法优化支持向量机的滚动轴承故障诊断模型。利用BA很好的全局寻优能力和收敛速度对SVM参数进行优化选择,从而获得最优参数组合(C,σ),提高了SVM的分类识别率和速度,其优化流程如图3所示。

图3 BA-SVM优化流程
4 实验与结果分析
4.1 样本选择与特征提取
笔者采用美国凯斯西储大学轴承数据中心的滚动轴承数据。实验用加速度传感器对信号进行采集,分别采集了轴承在正常状态、内圈故障、滚动体故障和外圈故障4种状态下的振动信号。分别在每种状态下选取20组振动信号数据,随机选取其中的15组作为训练样本,剩余的5组作为测试样本。首先对训练样本进行EEMD分解,选取分解后的前8个故障信息丰富的IMF分量,再计算各分量对应的能量并构成特征向量,并将之输入到多故障分类器中进行训练,训练样本的能量特征向量见表1(由于篇幅有限,每种状态只列举了部分样本,且保留4位有效数字),最后利用测试样本对训练好的分类器进行轴承工作状态的测试。

表1 部分训练样本的能量特征向量
4.2 建模与诊断
利用BA对SVM的参数进行寻优,BA的迭代次数为200、种群规模为20,BA-SVM的最佳适应度曲线如图4所示。当最佳适应度曲线稳定时,代表已趋于收敛,即获得最佳参数组合,从图4中可以看出,迭代次数为第4代时就趋于平稳。
为了验证BA-SVM模型对滚动轴承故障诊断的效果,与GA-SVM、PSO-SVM诊断模型进行比较,结果如图5所示。可以看出,BA-SVM经过少量迭代即迅速搜索到最优值,相较于GA-SVM和PSO-SVM而言,收敛精度高且寻优速度快。

图4 BA-SVM的最佳适应度曲线

图5 3种模型的最佳适应度曲线
从算法运行时间上分析上述3种故障诊断模型的性能,从表2可以看出,BA-SVM相对于GASVM和PSO-SVM而言,在运行时间和故障诊断识别率方面都有较大的优势,由此也证明了BASVM模型在滚动轴承故障诊断方面的有效性和稳定性。

表2 3种模型性能比较
5 结束语
针对支持向量机中参数选取不当易影响分类结果的问题,笔者采用蝙蝠算法优化支持向量机参数,并应用于滚动轴承的故障诊断中。实验结果表明BA-SVM模型相较于GA-SVM和PSOSVM模型而言,诊断识别率高、收敛速度快,对滚动轴承故障诊断效果较好。因此笔者所设计的BA-SVM模型能够有效识别滚动轴承在运行中发生的多类故障,保障了滚动轴承的有效运行,具有较高的应用价值和广阔的应用前景。
猜你喜欢
一重技术(2021年5期)2022-01-18
读者·校园版(2020年19期)2020-09-16
当代陕西(2019年19期)2019-11-23
智族GQ(2019年9期)2019-10-28
英美文学研究论丛(2018年1期)2018-08-16
电子制作(2018年10期)2018-08-04
小溪流(画刊)(2016年12期)2017-02-04
北京航空航天大学学报(2016年6期)2016-11-16
微型小说选刊(2015年5期)2015-06-05
小学生·多元智能大王(2014年5期)2014-07-24
