
基于逆向动力学的点射过程人枪动态响应研究
2021-06-03 03:24王亚平王新蕊
振动与冲击 2021年10期
王 缘, 王亚平, 王新蕊, 徐 诚
(1.南京理工大学 机械工程学院,南京 210094; 2. 中国兵器工业第208所,北京 102202)
在步枪射击过程中,人体与枪械之间是直接相互影响的。枪械产生的火药燃气作用力、后坐到位撞击力和复进到位撞击力等会传递到人体上,使人体产生疲劳,而人体的控枪能力、对枪械作用力的生物响应和姿态的变化又会反映到枪械上,对射击精度产生影响。近年来国内外日益重视枪械的人机工效特性,采用高速摄像、表面肌电和足底压力板等测试系统开展了大量的人枪响应特性试验研究,获得了枪械的质量、重心和枪托长度等对人体肌肉疲劳和稳定性的影响[1-4]。但射击过程中主要承担枪械冲击作用的是人体各骨骼和关节,通过试验方法无法直接获得人体内部生物力学特性,因此需要建立人枪骨骼肌肉模型进行逆向动力学求解分析。
目前国内外常见的人枪相互作用建模方法有以下三种:LifeMod/ADAMS方法、有限元方法和AnyBody方法,前两种方法的输入为发射冲击载荷,属于正向动力学方法;AnyBody方法输入运动作为驱动,可求解人体内部运动与受力情况,属于逆向动力学方法。Lee等[5]、杨晓玉等[6]、杨帆等[7]和金鑫等[8]采用LifeMod/ADAMS分析了枪械冲击作用下人体右肩、抵肩和胸关节等受力特性;Choi等[9]、Lee[10]和Chae等[11]建立了人体有限元模型,分析了射击冲击作用下产生的人体最大压力和肩部位移;杨洋等[12-13]用试验数据驱动AnyBody人体仿真模型,分析了手枪和步枪连续射击时肌肉激活程度和人体主动控制下的响应情况。以上工作对了解人枪相互作用特性具有重要的参考价值,但还存在一些不足:①只分析了几个典型关节的受力或位移,未研究不同关节之间受力特性的差异;②模型驱动参数分辨率不够,未将枪械自动机循环过程与人体响应联系,无法全面揭示人体对枪械冲击作用的响应特性。
本文在AnyBody人体建模环境中建立了典型步枪人枪相互作用骨骼肌肉模型(以下简称人枪模型),采用三维运动捕捉系统获取的人枪特征点运动作为模型驱动,进行了逆向动力学求解,用相对受力大小表征射击对人体冲击作用力,结合上肢各关节受力变化趋势,分析了步枪站姿无依托点射过程中人枪相互作用力响应特性,定量掲示了射击时人体运动与受力传递机理。
1 人枪模型建立
1.1 人枪相互作用骨骼肌肉模型
基本假设如下:
(1)三发点射过程时间小于300 ms,未发挥人体神经系统主动调节作用,人体处于被动响应状态,故将人体作为无反馈的被动生物体来考虑;
(2)射击过程中肌肉收缩速度适中,关节角度变化小,肌肉强度恒定,不考虑肌肉的并行被动弹性和肌腱的串行弹性等特性;
(3)人枪之间的接触仅考虑弹性力和摩擦力;
(4)忽略射手心理因素和外界刺激的影响。
人枪动态响应特性分析可知,在射击过程中人体骨盆位置几乎没有发生改变,人体上半身是围绕着骨盆运动的,且手臂的运动与受力非常复杂,因此本文将人体模型下肢固定在地面以提高计算效率,手臂则选取精细模型以提高计算精度。
AnyBody中定义的人体骨骼肌肉模型包括刚性骨骼、骨骼间的连接和生理学性质的肌肉肌腱。本文建立的人体骨骼肌肉模型分析部位包括头部、颈部、胸部、左右肩胛骨、左右手臂、左右手、整个躯干和骨盆部位等共53个体节、35个关节和左右臂肌群、上肢躯干肌群等人体主要肌肉156块。
根据熟练射手身高(1.85 m)、体重(85 kg)、骨骼几何长度等生理特性,采用LengthMassFat缩放法则调整。将M4卡宾枪模型添加到建模环境中,根据实际射击姿态分别在枪的护木、握把和枪托尾端与人体的左手、右手和右肩肩胛骨处添加约束和接触。建立的人枪相互作用骨骼肌肉模型,如图1所示。

图1 试验与人枪模型对比图Fig.1 Test and human-rifle model comparative diagram
1.2 模型驱动参数的试验获取
本文采用Codamotion三维运动捕捉系统获取人体上肢关节、背部、腰部及步枪特征点的运动特性,作为人枪模型的驱动,以实现逆向动力学求解。
试验按照标准骨性特征点位置[14-15]布置了人体上12个骨性特征点和步枪上1个特征点,如图2所示。三维运动捕捉系统的采样频率为200 Hz,测量精度为0.001 mm。试验步枪为M4卡宾枪,选取的熟练射手为右利手,在室内100 m靶道中进行,先进行多次三发点射以熟悉射击环境,充分休息后正式试验。
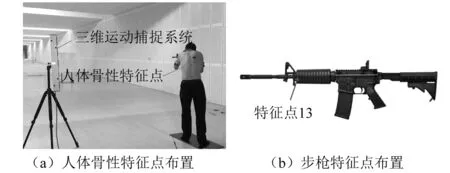
图2 三维运动捕捉特征点设置Fig.2 Three-dimensional motion capture system′s markers placement
熟练射手控枪能力较强,特征点运动一致性较好(p<0.01),在此以典型点射过程进行分析。试验获取的人体骨盆和步枪上特征点运动如图3、图4所示,可看出在射击过程中,人体骨盆位置几乎没有发生变化。
在三发点射过程中,步枪在射击方向上的运动具有三发规律性。每个射击循环中,击发后自动机开始后坐,射击方向上枪向后运动速度增加,后坐到位撞击时达到最大后坐速度;随着自动机开始复进向前运动,后坐速度减小,直至复进到位撞击时达到最大向前速度。

图3 试验获取的人体骨盆特征点运动Fig.3 Movement of human pelvis characteristic point obtained by experiment

图4 试验获取的步枪上特征点运动Fig.4 The motion of rifle feature point obtained from the experiment
逆向动力学是指根据物体的运动表象,利用力学定律来求解使物体运动发生变化的动力表达[16]。在典型的人体逆向动力学分析中,肌骨系统都有肌肉冗余的问题,即驱动关节运动所必须的肌肉数量小于实际建立的肌肉模型数量[17]。动作熟练时肌肉系统性地募集,即中枢神经系统选择激活肌肉时有一些标准,转化为数学优化问题,使目标函数G最小
(1)
并服从于

(2)
式中:f为肌肉力;Ni为肌肉强度;r为已知的加载;C为系数矩阵。
多项式标准权值趋于无限时为肌肉最小/最大优化方法,此时肌肉以最大协同方式作用,适合用于评估人机工效,本文即采用此方法进行逆向动力学求解。
1.3 模型验证
本文采用Delsys表面肌电测试系统获取射击过程中左右臂三角肌中束、斜方肌、肱二头肌、肱三头肌和肱桡肌的肌电信号,采样频率1 000 Hz。将骨骼肌肉模型仿真结果与试验结果进行对比,验证了模型的正确性和合理性。由于仿真结果为肌肉激活度,试验测试结果为肌肉的肌电信号,两种结果的单位不同,无法进行数值上的直接比较,但是均反映肌肉活性的变化,因此只对变化规律一致性进行比较。
以右臂肱二头肌为例,模型计算结果与试验数据对比如图5所示,将试验肌电信号与人枪模型的肌肉激活度进行皮尔森相关性分析(显著性水平α=0.01),结果表明二者具有较好的一致性(r=0.731,P=0<0.01),证明本文所建人枪模型满足精度要求。
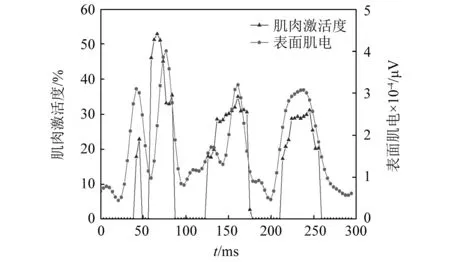
图5 右臂肱二头肌试验与仿真结果比较Fig.5 Comparison of test and simulation results of right arm biceps brachii muscle
2 人体运动学响应特性分析
人枪模型求解可获得步枪点射过程中人体内部运动学响应,包括骨盆(前倾、左右旋转、上下旋转)、脊柱(前倾、旋转、侧向弯曲)、左右侧胸锁(前伸、提升、轴向旋转)、左右侧盂肱(屈伸、外展、外旋)和左右肘(屈伸、旋转)等众多角度变化。下文将分析具有三发规律性或与步枪三个方向运动相关的人体内部运动学响应。
2.1 骨盆和脊柱的运动学响应
骨盆和脊柱前倾运动响应计算结果,如图6所示,在整个三发点射过程中,骨盆前倾角度和脊柱前倾角度变化是一致的(r=0.998,P=0<0.01),与枪的后坐运动也具有一致性(r骨=0.984,r脊=0.977,P=0<0.01)。随着步枪的一直向后运动和冲击力作用,骨盆和脊柱的前倾角度都相应不断减小,变化幅值分别为6°和4.7°。

图6 与步枪前后运动一致的响应Fig.6 The response consistent with the rifle motion of front and back
如图7所示,骨盆和脊柱的左右旋转角度变化是一致的(r=0.940,P=0<0.01),分别与步枪的左右运动具有一致性(r骨=-0.948,r脊=-0.947,P=0<0.01)。从变化规律来看,射击时右肩肩胛骨抵住枪托尾端面承受冲击力,人体左右受力的不平衡,产生以骨盆为中心的左右转动。第一发射击过程中,骨盆和脊柱持续向右旋转,随后角度维持不变。骨盆和脊柱的最大角度变化值分别为6.4°和5.3°。

图7 与步枪左右运动一致的响应Fig.7 The response consistent with the rifle motion of left and right
射击中步枪的上下运动明显小于其他方向运动,人体在上下方向姿态变化不大,骨盆的上下旋转角度变化值小于1°,脊柱的侧向弯曲角度也没有明显变化。
2.2 手臂的运动学响应
手臂的运动学响应包括肩部和肘部的屈伸、外展和翻转,以图8所示的典型左右肘屈伸角度变化为例描述手臂运动学响应。右臂运动姿态可以用三发构成包络线的波动变化来描述,只有首发波动幅度较大。而人体受力左右不平衡产生右旋运动,导致左臂各运动姿态(除了左肩屈伸)在首发中变化幅度较大,第二、第三发时右旋角度保持不变,只可构成第二、第三发包络线。

图8 左右肘屈伸角度变化Fig.8 Variation of left and right elbows flexion angle
结果表明(见图8),右肘屈伸角度的变化与步枪的自动循环特性具有良好的一致性。后坐过程中右肘屈伸角度变小,后坐到位撞击对应波谷,复进过程中屈伸角度变大,复进到位撞击对应波峰位置。
左肩和右肩屈伸角度与步枪的前后运动一同变化(r左=0.982,r右=0.987,P=0<0.01),第一发和第二发屈伸角度减小的幅值相近,在第三发时屈伸角度趋近于稳定不变。左肩和右肩屈伸角度的变化分别为4.8°和3.2°,表明左肩易受外力的影响。
右肘翻转角度与枪左右运动变化规律一致(r=0.823,P=0<0.01),但相关程度小于骨盆和脊柱的右旋。
因此在射击过程中,与步枪前后运动变化一致程度高的为人体骨盆、脊柱的前倾角度和左右肩的屈伸角度变化,对枪左右运动响应明显的为骨盆和脊柱的左右旋转运动。
3 人体动力学响应特性分析
人枪模型逆向动力学求解获得了人体上肢关节和肌肉受力变化情况,人体上肢关节众多,下文涉及的各个关节及方向定义,如图9所示。

图9 上肢各关节及方向Fig.9 Joints and directions of upper limbs
本文采用皮尔森相关性将变化趋势相同的关节分为一组进行分析,给定显著性水平α=0.01。计算发现骨盆和脊柱中,T12L1、L1L2、L2L3和L3L4变化一致,做为腰椎部位系列;骶骨骨盆、L5骶骨和L4L5变化相同,作为骨盆部位系列进行分析;左右肘部的桡尺近端关节、肱桡关节和肱尺关节一致程度较高,前两者在射击过程中受力及变化均小于肱尺关节,则肘部以肱尺关节为代表进行分析。
3.1 关节受力分析
在没有射击冲击载荷作用下,关节之间的受力即存在显著差异,为了更加直观地描述射击过程中人体受力变化,采用相对受力大小表示
(3)
式中:R为关节相对受力大小;F为射击过程中关节受力;F0为击发前瞄准阶段的关节受力。
图10为抵肩处的前后方向相对受力。首发击发后,随着枪的后坐,接触力不断增加,在自动机后坐到位撞击时到达最大值。后坐过程中骨盆和脊柱向右旋转的速度不断变大,在复进过程中右旋速度达到最大值,导致枪托尾端与右肩作用处发生短暂分离,受力下降。随着枪的继续向后运动,枪托尾端再次接触抵肩处产生作用力。第二、第三发射击过程中,人体右旋角度变化很小,抵肩处牢固且受力均匀。此外,第一发射击结束后,人体肌肉自主收缩产生预紧力作用,使第二、第三发关节和肌肉受力均小于第一发,与试验获得肌肉肌电信号变化相符,下文重点对第一发射击过程中相对受力进行分析。

图10 右肩抵肩处前后方向相对受力Fig.10 Relative force between the right shoulder and rifle stock in the front and rear direction
图11所示为腰椎部位各关节在左右方向上相对受力,腰椎部位关节越靠近颈椎,左右方向上相对受力就越大,响应右肩抵肩处冲击作用。腰椎部位在后坐和复进到位撞击时受力方向相反,且后坐受力小于复进受力。
除了在后坐和复进过程中受力均发生显著变化的关节之外,还有图12的所示只在后坐过程中受力变化明显的前后方向上右盂肱关节,和只在复进过程发生改变的左右方向上右胸锁关节。

图11 腰椎部位左右方向相对受力Fig.11 Relative force in the left and right direction of lumbar vertebrae

图12 右胸锁左右方向和右盂肱前后方向相对受力Fig.12 Relative force of right sterno clavicularis in the mediolateral direction and glenohumeral in the anteroposterior direction
为说明冲击力对人体关节的作用,按照射击过程中关节不同的受力变化趋势、后坐与复进到位撞击时受力大小,分别做出三个方向上人体在两个时间点(后坐和复进到位撞击)的受力时序图,如图13~图15所示。

图13 前后方向受力时序图Fig.13 Sequence diagram of force in anteroposterior direction
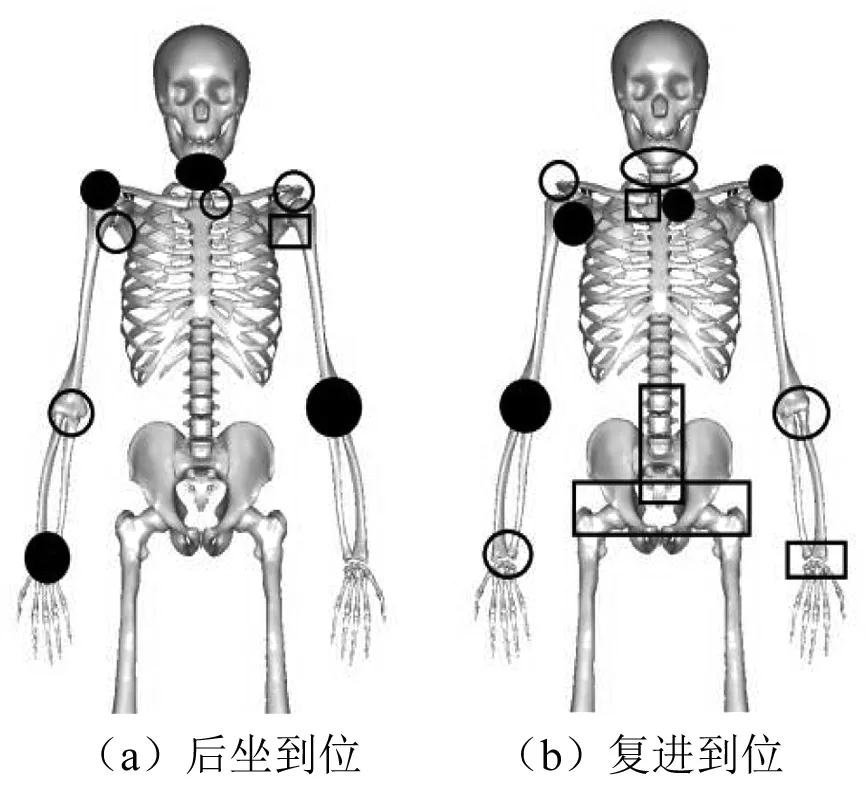
图14 左右方向受力时序图Fig.14 Sequence diagram of force in mediolateral direction
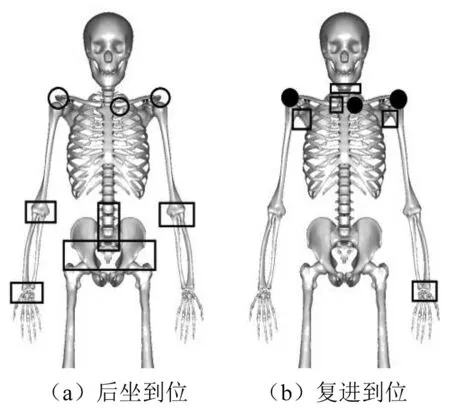
图15 上下方向受力时序图Fig.15 Sequence diagram of force in inferosuperior direction
只在后坐或复进中关节受力发生显著变化的用方框表示,在两个过程受力都发生明显变化,受力小的用透明圆表示,受力大的用实心圆表示。
整个射击过程中,右肩部关节(包括胸锁、肩锁和盂肱关节)相对受力大于左肩部,右肘肱尺关节相对受力大于左肘肱尺,左腕关节相对受力大于右腕。其中,后坐过程中受冲击作用受力变化最大的是右肘肱尺关节左右方向,后坐到位相对受力为3.6;复进过程中受力变化最大的为左腕关节,复进到位相对受力为8.3。前后方向上骨盆和脊柱各关节相对受力较为一致,后坐到位相对受力均值为3.2,复进到位相对受力均值是2.2。
从人体对射击运动姿态响应可知,射击主要导致人体的前倾、屈伸和右旋角度改变,下文将注重分析人体前后方向和左右方向的受力。
后坐过程中,射击冲击对人体前后方向作用大于左右方向,相对受力差值在0.8~3.1。人体右侧的胸锁、肩锁、盂肱和右腕关节,左侧肩部盂肱、肘部肱尺关节和主要承受枪在前后方向上的冲击力。左侧胸锁、肩锁和右肘肱尺关节主要承受枪在左右方向上产生的作用力。骨盆部位主要承受前后方向作用力,腰椎部位主要受到左右方向作用力。
复进过程中,射击冲击对人体左右方向作用大于前后方向,相对受力差值为0.6~15。人体右侧的胸锁、肩锁、盂肱和肘部肱尺关节,左侧胸锁和腕关节,共同承受枪在左右方向上的作用力。左侧肩锁、盂肱、左肘肱尺和右腕关节一起承受枪在前后方向上的作用力。腰椎和骨盆部位都主要承担左右方向作用力。
3.2 关节力矩分析
射击过程中枪械对人体的作用除了关节处受力之外,还有射击冲击产生的外力矩。分析表明点射过程中惯性力矩和重力矩远小于射击冲击产生的外力矩,因此冲击外力矩是导致关节力矩变化的主要原因。同样采用射击时关节力矩除以瞄准时关节力矩得到的相对力矩大小来表示关节力矩响应,典型计算结果如图16、图17所示。
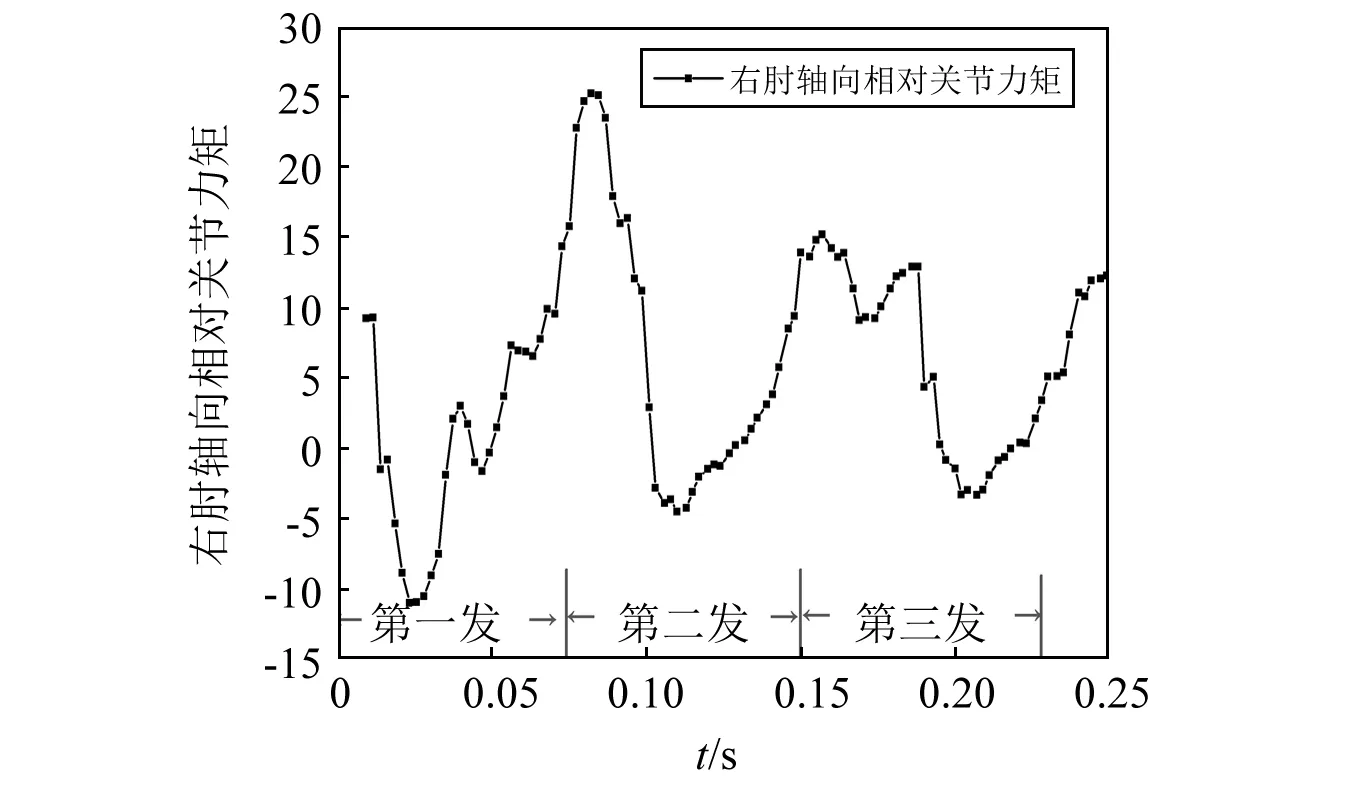
图16 右肘轴向相对关节力矩Fig.16 Relative joint moment of right elbow axial direction
右肘轴向在后坐和复进过程中关节力矩都发生显著改变,且方向相反(见图16)。后坐过程中,承受使右肘屈伸角度变小的负力矩,后坐到位撞击时达到最小值;复进过程中受到使屈伸角度变大的正力矩,复进到位撞击时到达最大值,与步枪自身的运动循环特性保持一致。具有相同变化规律的还有左肘侧向和颈椎C0C1侧向关节力矩,三者均是复进到位时产生的相对关节力矩大于后坐到位。

图17 左肘轴向相对关节力矩Fig.17 Relative joint moment of left elbow axial direction
另一种是只在复进过程中关节力矩发生显著变化,如图17 左肘轴向相对力矩所示为左肘轴向,具有相同变化趋势还有右肘侧向、左腕轴向和颈椎C0C1轴向力矩。而右腕轴向关节力矩在射击过程中无明显变化。
虽然整个射击过程中右臂肩和肘部相对受力大于左臂,但左右手臂姿态不同导致力臂不同,并不是右臂相对力矩大于左臂。由相对力矩大小结合力矩响应特性可知,整个射击过程中,右肘轴向相对力矩大于左肘,但左肘侧向相对力矩大于右肘。后坐过程对左肘侧向力矩造成改变最大,后坐到位相对关节力矩为12.2;复进过程对右肘轴向力矩产生影响最大,复进到位时相对关节力矩为25.2。
3.3 肌肉力矩分析
肌肉力矩是肌肉伸缩发力对其相应关节产生的力矩,一定程度上能够表征关节附近肌肉发力的大小。对计算结果进行皮尔森相关性分析发现,手腕的屈伸与外展肌肉力矩变化是一致的(P=0<0.01)。左右肩的屈伸、外展与肘的屈伸肌肉力矩变化趋势相同,图18所示为右肘屈伸相对肌肉力矩,后坐和复进到位时肌肉力矩相反。

图18 右肘屈伸相对肌肉力矩Fig.18 Relative muscle torque of right elbow flexion
与屈伸肌肉力矩变化不同,图19所示的右肘旋转相对肌肉力矩只在复进过程中发生显著变化。按照射击过程中肌肉力矩变化趋势,后坐与复进到位撞击时力矩的方向,计算结果分析发现人体肌肉力矩响应可分为3种典型特性,如表1所示。

图19 右肘旋转相对肌肉力矩Fig.19 Relative muscle torque of right elbow pronation

表1 三种典型肌肉力矩响应Tab.1 Three typical muscle torque responses
整个射击过程中左肩外展肌肉力矩大于右肩,右腕肌肉力矩大于左腕。肩和肘的屈伸肌肉力矩在后坐过程中左臂大于右臂,复进过程则相反。后坐过程中右肩旋转相对肌肉力矩最大,后坐到位相对肌肉力矩为60.7;复进过程中右肘旋转相对肌肉力矩最大,相对肌肉力矩值为141.7。
射击过程中左腕的屈伸和外展相对肌肉力矩都很小且无变化,而相对关节力矩变化较大,说明射击冲击对左腕的作用以外力矩为主,肌肉产生响应极小。右腕相对关节力矩很小,相对肌肉力矩变化显著,说明右腕是通过肌肉发力来响应冲击作用的。
综合相对关节力矩和相对肌肉力矩的变化速度和趋势可得,除了复进时左右肘屈伸肌肉产生很大的肌肉力矩来响应冲击作用,射击对其他关节(除了右腕)主要为较大的冲击外力矩作用。
4 结 论
(1)建立了立姿无依托人枪骨骼肌肉模型,通过试验获取了模型驱动数据,对三发点射过程人枪相互作用进行了逆向动力学求解与分析,模型计算出的肌肉激活度与试验获得的对应肌肉表面肌电基本一致,证明了模型的可信性。
(2)在点射过程中,与步枪前后运动规律一致的为人体骨盆、脊柱的前倾角度和左右肩的屈伸角度变化,变化幅值分别为6°,4.7°,4.8°和3.2°;与步枪左右运动相对应的为骨盆和脊柱的左右旋转运动,变化了6.4°和5.3°。计算结果表明,步枪射击冲击对关节受力产生的影响为右肩大于左肩、右肘大于左肘和左腕大于右腕,各脊柱关节前后方向相对受力差异不大。关节力矩方面,射击冲击很大,关节以承受外力矩为主;肌肉力矩对冲击的响应为左肩外展大于右肩,和右腕大于左腕。
(3)步枪射击的后坐过程中,左肩盂肱及肘关节、右肩部和骨盆部位主要承担前后方向作用力,左胸、肩锁、右肘和腰椎部位对左右方向作用力产生响应,后坐到位撞击对关节前后方向的作用力大于左右方向。左臂肘部和腕部所受的关节力矩大于右臂,左肩和肘的屈伸肌肉力矩也大于右臂。
(4)步枪射击的复进过程中,只有左肩部、肘和右腕关节对前后方向的力产生响应,其余部位主要承担左右方向作用力,复进到位撞击对关节左右方向作用力大于前后方向,其中左腕受力变化最大。力矩方面,对右肘轴向关节力矩产生的影响最大,复进过程中外力矩减小则左右肘以屈伸肌肉力矩响应为主,且右臂肩和肘的屈伸肌肉力矩大于左臂。
(5)逆向动力学求解分析为士兵训练和步枪人机工效优化设计提供参考。射击姿态下步枪的质量主要由左臂承担,左臂的肌肉力矩较大,而右臂因为承受射击冲击作用使得右肘部受力变化较大。因此在射击和训练中,要预防士兵左臂肌肉疲劳和右肘关节损伤;步枪设计参数如枪托长度、前握把位置、质量和重心等的不同,会改变人体射击姿态,影响到关节受力,进而对射击精度产生影响。通过逆向动力学的方法,可求解分析步枪设计参数对关节受力和射击精度的影响,从而优化步枪人机工效设计。
猜你喜欢
文萃报·周二版(2022年24期)2022-06-16
发明与创新(2021年39期)2021-11-05
小哥白尼(军事科学)(2021年6期)2021-11-02
饮食保健(2019年24期)2019-12-24
汽车工程学报(2017年2期)2017-07-05
家庭百事通·健康一点通(2017年5期)2017-05-19
山东青年(2016年12期)2017-03-02
光学精密工程(2016年6期)2016-11-07
军事体育学报(2016年2期)2016-06-15
航天制造技术(2016年6期)2016-05-09
