
六足式幕墙清洗爬壁机器人设计与控制
2021-05-26 07:53谢晓轩李自胜留沧海邓归洲
自动化与仪表 2021年5期
谢晓轩,李自胜,留沧海,邓归洲,陈 坤
(西南科技大学 制造科学与工程学院,绵阳621000)
随着中国城市化进程的推进,大中小城市中,一栋栋高楼大厦日渐矗立起来。玻璃幕墙由于具有采光优良、美观实用、抗震能力强、质量轻等优点,被广泛运用于这些高层建筑的外围防护结构。在这种情况下,随之而来的是繁重且大量的幕墙玻璃清洗工作。对于幕墙玻璃的清洗,采用人工清洗的方式不省时又费力,且成本高。因此,玻璃幕墙清洗爬壁机器人逐渐成为国内外研究人员的研究热点。
玻璃幕墙清洗机器人可以认为是爬壁机器人携带清洗机构和清洗剂的组合体,吸附和移动是爬壁机器人须具备的基本功能。吸附方式主要可分为磁力吸附、推力吸附、真空负压吸附和仿生静电吸附。磁性附着只适用于铁磁表面,包括电磁体吸附与永磁体吸附两种方式[1-2]。对于推力吸附,在推力模式下,气动螺杆通常用于产生推力,将机器人压在壁面上[3],该机构可以帮助机器人在运动过程中避开障碍物,但其不足的稳定性阻碍了该方法的广泛应用。而真空负压吸附作为一种最常用的附着方式,可以广泛应用于较不粗糙的表面[4],无论玻璃、瓷砖、水泥等材料,它都能对表面产生很强的吸力[5]。
当前,负压真空多吸盘爬壁机器人主要有框架式、轮式、履带式和腿足式等。框架式运动机构可以使机器人质量更轻,运动轻便灵活,但其运动机构由内外框架通过十字型动平台相连,结构比较繁琐,控制复杂[6]。轮式移动机构具有移动速度快、效率高、控制简单等优点[7-8],但轮式移动机构对移动表面要求较高,仅适用于平坦且无障碍表面,且不适合于攀爬。履带式移动方式是将吸附机构安装在履带上并吸附在墙面,机器人通过履带上面吸附元件的依次吸附和脱离来实现运动[9],这种移动方式相当于轮式机构的升级,其吸盘更多,稳定性以及负载能力较强,具有一定的越障能力,但结构更加复杂,机动性差。而基于仿生学的腿足式爬壁机器人具有运动灵活、越障能力突出、承载能力强和稳定性高等优点,足的数量以及关节数量越多稳定性以及灵活性越强。通过对比,腿足式的结构在移动方式上更具优势。
因此,结合当前爬壁机器人的吸附和移动方式优缺点,设计了一款基于真空负压吸附原理六足式爬壁机器人,其自由度多、运动灵活、壁面适应性强、具有一定的越障能力,能够在玻璃壁面上稳定行走。对机器人的机械结构进行了设计,完成了运动学建模和步态规划,并通过样机试验验证了其运动方案的合理性。
1 机械结构设计
六足式爬壁机器人采用对称式并联机构,主要由矩形框架式机身、机械腿、吸附装置(吸盘)和真空泵组成,机器人其6 条腿均匀分布在机身两侧,每条腿具有臀、大腿、小腿3 个旋转关节,分别通过3 个舵机驱动,整体结构共具有18 个自由度。每个机械腿由连接支架、3 个舵机和真空吸盘构成,舵机A 驱动臀关节,实现整条腿的前后摆动;舵机B 驱动大腿关节,实现腿的俯仰摆动,舵机C 驱动小腿关节,实现小腿和吸盘部分的收展运动;真空吸盘通过软管连接机器人搭载的真空泵,完成对玻璃幕墙的吸附功能。可以通过各个关节协调运动以及吸盘的吸附与释放来实现整机沿玻璃壁面爬行。
六足爬壁机器人机身采用铝合金材料,能保证一定强度的同时降低整机重量。其机身框架上可以安装控制系统和电路,同时还可搭载清洗机构、检测装置和清洗剂来完成对玻璃幕墙的清洗、洁净度检测等作业。
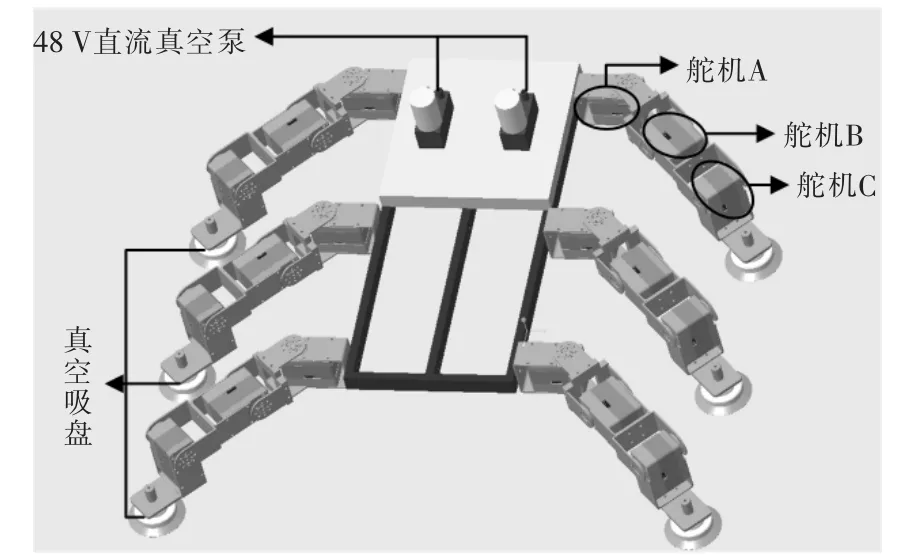
图1 机器人整体结构Fig.1 Overall structure of wall climbing robot
与其他爬壁机器人相比,该结构自由度较多,运动更加灵活,在玻璃幕墙上攀爬时可以越过窗框障碍,其腿的数量较多可以在1 条或者2 条腿发生故障的情况下,其他腿也能完成爬壁功能,稳定性更高。此外,足式的结构更容易实现转弯和全方位行走。
2 机器人运动学分析
爬壁机器人要实现其移动的功能,最关键的问题就是要完成其运动的控制。六足爬壁机器人单腿可以看作是由3 个单连杆经过串联组成的多连杆结构,机器人运动学分析就是在机器人机体以及腿部各关节连杆以及地面上创建一系列的坐标系,然后通过坐标连杆的齐次变换来获取各腿部坐标系、机体坐标和世界坐标系三者之间的相对位置关系[10]。D-H 参数法[11]是最常用的足式机器人运动学分析方法,因此对于本文的六足爬壁机器人,同样使用D-H参数法对其单腿进行运动学分析建模,如图2 为单腿的连杆结构示意图。

图2 单腿的连杆结构示意图Fig.2 Schematic diagram of single-leg connecting rod structure
坐标系(1)为单腿运动的全局坐标系,(2)、(3)、(4)为3 个连杆的局部坐标系,连杆长度分别为l1、l2、l3;关节转角分别为θ1、θ2、θ3,坐标系(2)与坐标系(1)之间的扭转角为90°,D-H 参数如表1所示,其中θi代表关节转角;αi代表关节扭转角;ai代表连杆长度;di代表连杆偏移;角标i 表示连杆编号。

表1 单腿D-H 参数Tab.1 D-H parameters of one leg
根据D-H 参数法可以表示出腿上各个关节坐标系之间的转换关系式,其表达式如式(1)所示:

由D-H 参数法的坐标转换关系式,假设坐标系{o1-x1y1z1}相对于坐标系{o0-x0y0z0}的变换矩阵为A1,坐标系{o2-x2y2z2}相对于坐标系{o1-x1y1z1}的变换矩阵为A2,坐标系{o3-x3y3z3}相对于坐标系{o2-x2y2z2}的变换矩阵为A3。
将D-H 参数表(表1)中各关节的对应参数代入矩阵Ai中的对应值,可得A1、A2、A3分别为
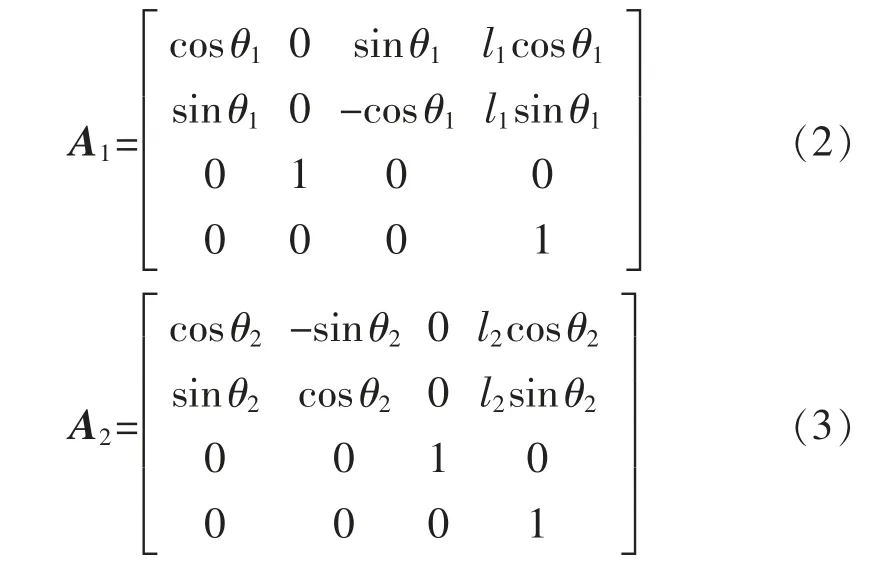

然后将3 个坐标转换式相乘,便能得到出爬壁机器人足端坐标系{o3-x3y3z3}相对于臀关节坐标系{o0-x0y0z0}的矩阵关系表达式,即臀关节到足端的总变换,这里用表示:
式中:[n o a] 表示姿态矩阵;px、py、pz表示足端坐标系{o3-x3y3z3}相对于臀关节坐标系{o0-x0y0z0}的位置坐标。
将上式中A1A2A3进行矩阵运算求解,并令cθi=cosθi,sθi=sinθi,θij=θi+θj,便可以得到式(6)和式(7):

通过对以上等式进行逆向求解,便可以得到臀关节、大腿关节和小腿关节的3 个关节转角。求解出的关节转角表达式如式(8)所示:

式中:k=pxcθ1+pysθ1-l1
3 机身运动规划
通过对六足式爬壁机器人单腿正逆运动学分析后,得到了机器人单腿的3 个关节转角的表达式
(8)。现在需要通过爬壁机器人一条腿解算出来的
关节转角得到其余五条腿的关节转角,从而完成六足爬壁机器人机身的运动学分析。
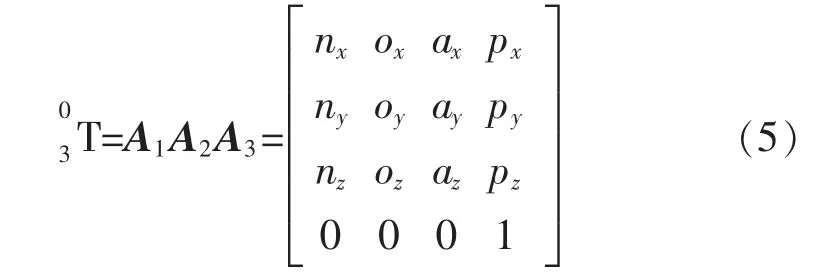
如图3所示,C 点为机器人的质心,1~6 分别表示机器人的六条腿。将机身的移动看做质心C 的移动,假设箭头方向为移动方向,则1 号腿的足端轨迹规划如图中所示。此时以1 号腿为参考,将其轨迹坐标按照逆时针为正顺时针为负的原则分别旋转20°、160°和180°便可以得到剩下的5 条腿的足端轨迹坐标px、py、pz,通过足端轨迹坐标px、py、pz便可以反解出其余5 条腿的关节转角,从而完成机身的运动规划。
图3 机身运动分析图Fig.3 Analysis of the motion of the fuselage
4 机器人步态规划
机器人腿与腿之间的协调运动来做到自身的运动和平衡,这种协调运动被称为步态,对机器人进行其运动时的步态规划,可以确保其运动的稳定性。在这里,采用的是六足机器人典型的三足步态。所谓三足步态,就是将6 条腿分为2 组,以3 条腿为1 组进行交替运动。
由相关研究可知,当机器人的质心处于机器人3 个足端所组成的三角形内时,机器人在运动时不会发生失稳现象。由此,如图4所示,将1 号腿、3 号腿、5 号腿分为一组,记为A 组,将2 号腿、4 号腿、6号腿分为一组,记为B 组。六足机器人在以三足步态运动时,A、B 两组腿会分别在支撑相和摆动相间交替切换,每一时刻都会有一组腿处于支撑相,另一组腿处于摆动相。所以,每组腿在机器人的一个行进周期当中会经历两个小周期,即支撑周期和摆动周期。处于支撑周期的腿负责维持机器人的稳定,处于摆动周期的腿负责机器人的向前迈步。通过这种形式的不断切换,完成机器人的行进。
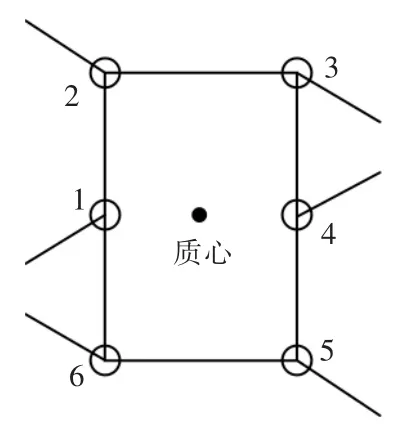
图4 机器人腿分组图Fig.4 Grouping diagram of robot legs
由于爬壁机器人自身重力方向与机器人运动平面平行,其稳定移动的前提条件是能够安全可靠地吸附于幕墙表面。机器人的吸附装置和移动机构的协调配合是其能够灵活运动的关键。对于足式爬壁机器人,足端吸盘与腿部运动的协调主要表现为支撑腿为吸附状态,摆动腿为脱吸附状态。由此,将六足爬壁机器人在幕墙玻璃上以三足步态行进的详细过程叙述如下:
(1)六足爬壁机器人处于初始位姿,即A、B 两组腿均处于支撑状态,两组腿足端处的真空吸盘均为吸附状态;
(2)A 组腿进入摆动周期,向前摆动半个步长,同时,B 组腿进入支撑周期,向后移动半个步长,利用反推力让机身重心向前移动半个步长,此时,A 组腿足端处的真空吸盘为脱吸附状态,B 组腿足端处的真空吸盘仍为吸附状态;
(3)A 组腿摆动到指定地方后下落,进入支撑周期,向后移动一个步长,利用反推力让机身重心向前移动一个步长,同时B 组腿进入摆动周期,向前摆动一个步长,此时,A 组腿足端处的真空吸盘为吸附状态,B 组腿足端处的真空吸盘为脱吸附状态;
(4)B 组腿摆动到指定位置后下落,进入支撑周期,向后移动一个步长,利用反推力让机身重心向前移动一个步长,同时A 组腿进入摆动周期,向前摆动一个步长,此时,A 组腿足端处的真空吸盘为脱吸附状态,B 组腿足端处的真空吸盘为吸附状态;
(5)通过不断重复步骤(3)和步骤(4),幕墙清洗机器人便能在玻璃幕墙上以三足步态进行行进。
在执行三足步态的开始阶段,让A、B 两组腿分别执行半个周期是为了将A、B 两组腿送入正确的相位,以便完成后面步骤(3)和步骤(4)中支撑相和摆动相的相位循环。六足爬壁机器人的三足步态行进过程如图5所示。

图5 三足步态示意图Fig.5 Schematic diagram of three-legged gait
5 舵机和真空吸盘的控制
机器人运动时足端摆动轨迹为一条曲线,其足端坐标是实时变化的,为方便控制,通常把连续的曲线离散为若干个点,让足端依次到达各个点位,使其步态曲线平稳流畅。基于逆运动学的计算结果,可以根据机器人足端的轨迹坐标解算出各条腿的臀关节和大小腿关节转角。我们需要将这些角度输送到舵机,驱动舵机转动相应角度,从而驱动机器人运动。STM32 控制器和舵机之间采用问答方式通信,控制板输出UART 信号指令包,经信号转换器,转为RS485 信号供舵机接收,舵机再返回答应包,一个总线控制网络中允许有多个舵机,所以每个舵机都分配有一个网络内唯一的ID 号。当舵机的ID 号与控制板发出指令中的ID 信息完全相同时,会向控制板反馈应答信息表示已经完整接收该条指令。由于通信采用串行异步方式,收发双方的时钟不完全一致,因此每一帧数据除了8 位数据位外还分别有起始位和停止位各1 位,无奇偶校验位,共10 位。其指令包格式如表2所示。

表2 指令包格式Tab.2 Instruction packet format
其中,字头:连续收到2 个0XFF,表示有数据包到达;ID 号:每个舵机都有一个ID 号,ID 号范围0~253,转换为十六进制0X00~0XFD;数据长度:需要发送的参数长度加上2 个起止位的长度,即n+2;指令:数据包操作功能码;参数:除去指令之外的其他控制信息,参数最大支持双字节参数表示一个内存值。校验和:校验和Check Sum 为该指令包除校验和之外的每一位数据之和(若计算值溢出则取最低的一个字节)再取反。
对于真空吸盘,采用真空泵和继电器对其完成控制。其中,真空泵为真空吸盘提供动力,将真空吸盘下的区域抽成真空,从而让机器人吸附在幕墙玻璃上。而继电器则控制着真空吸盘与真空泵之间通路的开启与关闭(作为阀门的开关),从而控制真空吸盘对幕墙玻璃的吸附与脱离。
6 实验及分析
根据之前的运动学分析和步态规划,以STM32为主控芯片,在keil5 软件中编写六足爬壁机器人的步态控制程序,实现其爬行步态控制,然后实现气动吸附与腿部运动的协调控制,搭建玻璃幕墙清洗机器人实验平台,对机器人的吸附和幕墙攀爬功能进行实验验证,进而实现机器人灵活移动和清洗等各项功能。

图6 机器人壁面爬行实验Fig.6 Robot wall crawling experiment
为了提高攀爬实验的安全性,为机器人连接了安全吊绳。实验过程中,该机器人步态效果良好、运动平稳、吸附较为可靠。机器人以三足步态沿壁面行走,在任一时刻都具有三条吸附腿和三条摆动腿,其运动速度较快,稳定性较好。每条腿具有3 个自由度,使机器人能够完成较为复杂的动作组,增强了运动的灵活性。
7 结语
本文设计了一种用于幕墙清洗的负压吸附六足式爬壁机器人,介绍了机器人机械结构和各腿关节的作用,利用D-H 参数法对机器人进行了运动学分析,其运算结果对足式机器人的控制具有重要意义。此外,将六足机器人典型的三足步态与真空吸盘的吸附控制相结合,规划出机器人攀爬步态并细述了控制过程,提出了总线舵机的具体控制方法。经过样机实验证明,机器人能够较为稳定的吸附在玻璃表面并完成全方位的攀爬运动,运动灵活性好,说明该机构和运动方案切实可行。该机器人后续玻璃幕墙清洗机器人的研制具有一定的参考价值。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
石油矿场机械(2022年3期)2022-06-17
装备制造技术(2020年2期)2020-12-14
自动化学报(2019年6期)2019-07-23
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
电子制作(2018年1期)2018-04-04
汽车实用技术(2017年16期)2017-09-21
制造业自动化(2017年2期)2017-03-20
中华骨与关节外科杂志(2016年3期)2016-05-17
