电动汽车LCL复合型无线充电研究
2021-05-25 05:57:32
电气传动 2021年10期
(三峡大学电气与新能源学院,湖北 宜昌 443002)
在全球环境与能源问题的双重打击下,电动汽车的出现与迅速发展是解决这一问题的有效途径,国内外电动汽车的产量与销量也直追传统燃油汽车。无线充电早期风靡于智能手机,近些年,为了满足大量电动汽车充电需求,无线充电于电动汽车方面的研究也进行地如火如荼[1-5]。电动汽车可以通过换电站电池更换,有线、无线充电进行电能的补给。电池更换需要建设大量换电站,且换电站需存储各种类型、品牌的电池,建造与运维成本较高;由于有线充电需要经常拔插插头,与插座存在物理磨损,易造成磨损部分老化,产生电火花,严重时甚至漏电,引起触电火灾等事故,并且恶劣环境下安全系数非常低[6];因此,与电池更换和有线充电相比,无线充电方式采用非接触式充电,安全系数高,建设成本较电池更换低,是未来电动汽车电能补给的重要组成部分与趋势[7]。
电动汽车的核心部位为其动力来源—电池,目前通常采用Li(锂)电池。对Li电池充电时,首先为恒流模式,此时电流为恒定值,电池端电压缓慢升高,当达到额定值时,切换为恒压模式,期间充电电流不断下降至电池满电,充电结束,即广为人知的“CC-CV”模式。现实生活中,常常会因为车主或其他因素导致发射端与接收端线圈未完美对应,易导致耦合系数降低,影响充电效率。文献[8]采用相应控制方法来稳定输出电压,但是其控制方法与策略异常繁琐,消耗大量时间。
文 献 [9]将 MERS(magnetic energy recovery swith)使用于原边补偿结构,当耦合系数降低时以此使系统保证最大功率输出。文献[10-11]分别采用S-S与LCL-LCL拓扑结构,将额外的补偿电容和开关加入到原边网络,实现了CC与CV的随意切换,但需要发射端与接收端有良好的信息交换,高频磁场空间中易造成无线通信不稳定,且难以维持磁耦合谐振状态。
基于上述文献所存在的问题,文章建立LCL复合型新型结构,对副边线圈中的3个可变补偿电容的MERS的导通角进行控制,实现了在保证系统磁耦合谐振[12]的状态下,切换负载时系统也能稳定工作于CC,CV,MP 3种工作状态。相对于传统的无线充电系统,其优势在于电能传输更加稳定、高效,充电状态切换平滑,对于目前电动汽车无线充电发展有着重要推动作用。
1 系统特性分析
LCL复合型无线电能传输系统(radio energy transmission system,RETS)模型[13-15]如图1所示。

图1 LCL复合型无线电能传输系统模型Fig.1 Model of LCL-composite wireless power transmission system
图1中U1为交流电压源;Q1~Q4构成电压型逆变器;L10,C10分别为发射端补偿电感、补偿电容;LP,LS分别为原、副边线圈电感;MPS为线圈互感系数;L20为接收端补偿电感;Ck1,Ck2,Ck3为接收端 3个可变补偿电容;RL为电池负载等效电阻。文中副边结构使用了3个可变补偿电容,为了便于理论分析,将系统简化为图2,其中U2为高频交流电。
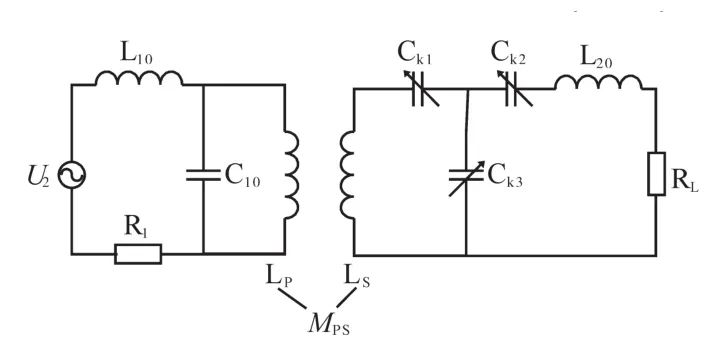
图2 LCL复合型简化电路Fig.2 LCL-composite simplified circuit
1.1 原边电路谐振分析
对于原边线圈,考虑到LCL型拓扑能使发射线圈的电流呈现出恒流源特性[16],所以选择LCL结构。根据经典电路理论:

式中:ω为角频率。
可以取L10=LP,所以得到原边电路磁耦合谐振的条件为

1.2 副边电路谐振分析
从图2可以看到副边电路的结构相对复杂,同理可得:

式中:RX为纯电阻。
由于Ck1,Ck2,Ck3为可变电容,所以副边线圈磁耦合谐振的条件为

2 CC,CV,MP状态特性分析
为了方便对3种状态的特性进行分析,将发射端电路等效为接收端的一个交流电源[17-19],如图3所示,图3中Us为发射端等效到接收端的交流电压源。
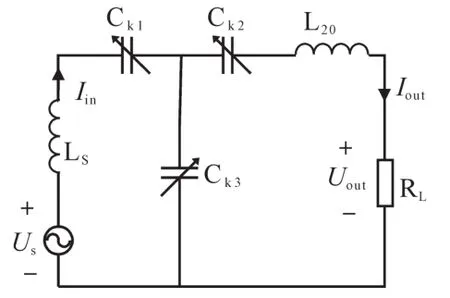
图3 副边线圈简化等效电路Fig.3 Simplified equivalent circuit of secondary coil
2.1 恒流输出原理
为简化计算,令β为一个常数,使得:

根据经典电路理论,由图3得:
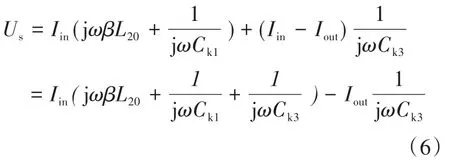

由式(6)可知,Iin的系数为0时,Iout仅与Ck3和Us有关,当Ck3为定值时,系统保持恒流输出。同时,系统需保证工作于磁耦合谐振状态,且其恒流条件也为耦合谐振条件,所以可以选择Ck1=Ck3,故当Ck3电容值确定时,可以得到:

由式(7)~式(9)可计算出LCL复合型RETS恒流输出时3个可变补偿电容的电容值。
2.2 恒压输出原理
由图3,有:

代入式(6),可得:

为了计算方便,令输入阻抗与输出阻抗分别为Zin和Zout:

根据经典电路理论有:
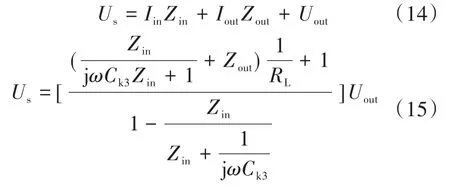
所以当1/RL前面的系数为0时,负载RL的电压Uout与自身无关。将式(12)、式(13)代入,可以得到在耦合谐振情况下的恒压输出的Ck1,Ck2,Ck3的电容值:
由式(16)~式(18)可计算出LCL复合型RETS恒压输出时3个可变补偿电容的电容值。
2.3 最大功率输出原理
在实际充电过程中,常常会因为车主或其他因素导致发射端与接收端线圈未完美对应,导致耦合系数降低,影响充电效率,系统无法维持最大功率输出。对存在于副边结构中的3个可变补偿电容的电容值进行切换匹配,不但能维持CC,CV模式,还可以实现维持最大功率输出模式[20-21]。当发射与接收线圈中存在障碍物,此时耦合系数骤降,充电效率极低,此时系统会有相应提示,对障碍物进行清理,以恢复正常。
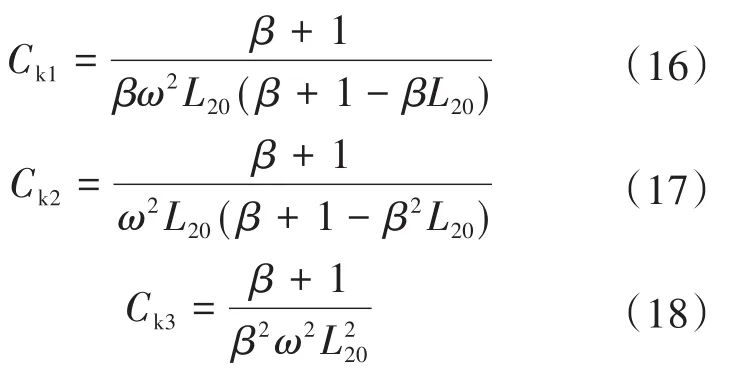
系统最大传输功率条件为

式中:Zeq为等效阻抗;ZL*为负载阻抗的共轭值。所以当互感线圈的互感系数MPS发生变化时,为了维持磁耦合谐振状态,同时使系统实现恒定最大功率的条件为
式(20)~式(22)表示了在其他网络参数保持不变的情况下,系统维持在最大功率输出时接收端3个可变补偿电容随MPS变化的电容值。
3 可变补偿电容分析
为了满足上述3种充电状态的切换,对副边结构中3个可变补偿电容采用MERS[22]控制,以此实现3个电容的动态调节。
3.1 MERS原理
全桥式MERS的电路如图4所示。

图4 MERS电路Fig.4 MERS circuit
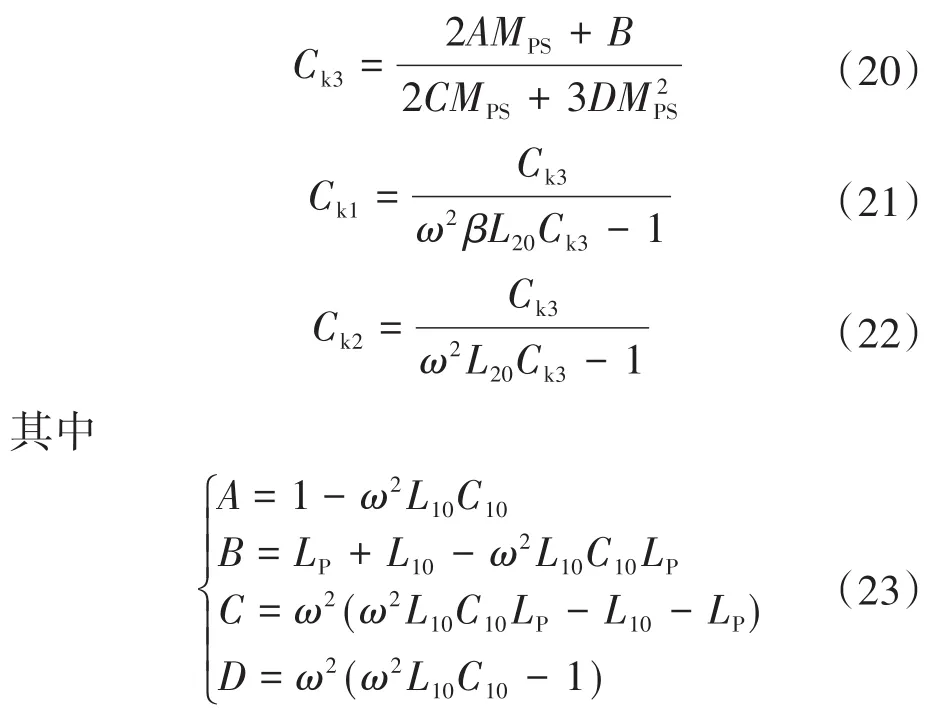
由图4电路可知,若想实现MERS调节动态电容,只有导通MERS中的A,B,C,D其中一个MOSFET或者对角开关(A—D,B—C)导通,否则Cdc会被短路。根据不同的开关组合状态,MERS电路的工作状态也不同,详见表1。其中√代表导通,×代表关断[23]。
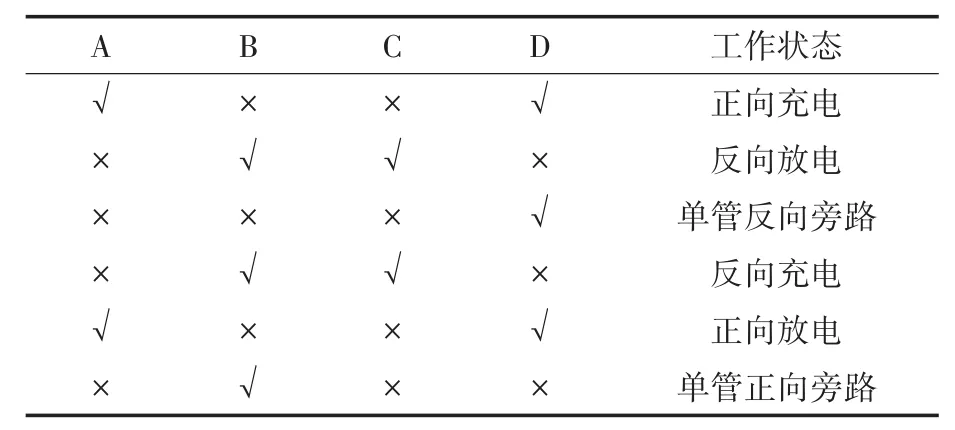
表1 MERS工作状态Tab.1 MERS working status
MERS电压输出波形如图5所示。将MERS运用于系统副边结构,任意一组双开关(如A—D)导通,Cdc进入充电模式;当Cdc两端电压为峰值时,即Cdc两端电压不会继续上升的时候,接着进行反向放电;放电结束后MERS则为单管反向旁路状态(只有一个MOSFET导通且与Cdc正向串联),此时Cdc上无电流;B—C导通,紧接着进入反向充电模式,直到Cdc两端电压为峰值;然后进行正向放电,MERS在放电结束后进入单管正向旁路状态,此刻Cdc上无电流。该过程即为MERS一个充放电周期,控制4个MOSFET的导通时刻,便能控制充放电过程,最终能达到MERS等效电容连续可控的效果。
3.2 MERS数学模型
采用移相控制调节MERS中MOSFET的开关导通时刻(时间周期转换为角度周期,即为α)来改变Cdc两端电压,从而实现等效电容的可调节性。由图5分析可知,在α=0°(图5中时间为0)时,MERS的电压波形为标准正弦波;当α≠0°时,在一个充放电周期中,MERS会有两次单管导通状态,该阶段Cdc不会有电流通过。
从上述可以得到MERS两端电压波形为图5所示。令XC为MERS中Cdc的容抗,C为等效电容值,i(x)为电流瞬时值,I为电流有效值,其电压值计算为
对式(24)进行傅里叶级数展开,取其基波项,整理得:
式中:I0为基波电流的有效值;θ为电压相位角。由此MERS基波电压的有效值和等效电容XMERS为

得到MERS的等效电容随导通角α变化曲线如图6所示。

图6 MERS电容曲线图Fig.6 MERS capacitance curve
通过式(26)和图6分析可得,相比于普通的电容,MERS通过控制MOSFET开关导通时刻,改变Cdc充放电状态,以此达到在单周期内得到一个“定值电容”。由式(27)可知,在Cdc电容值为一个定值的情况下,等效电容XMERS和导通角α关系见图6,只要改变导通角α,便能实现电容值的调整,由此来实现CC,CV,MP 3种工作状态。
4 仿真与实验验证
通过图5中MERS电压波形可知,当导通角α≠0°时,系统输出波形会发生一定程度的畸变。为了验证MERS是否适用于电动汽车无线充电系统,将分析输出谐波。对MERS施加380 V与220 V的电压,α与系统输出电流畸变率(THD)关系如图7所示。分析可知,随着α的增大,电流THD先增大至最大值后衰减至平稳,且明显380 V较220 V时电流THD更大。在端电压为220 V时,系统电流THD不会超过7%。

图7 电流畸变率变化图Fig.7 Variation of current distortion rate
对电容峰值电压进行分析,电容峰值电压随α变化的关系如图8所示,显而易见,随着α的增大,电容峰值电压也在增大,但在α<40°时,其增幅较小,当α>40°后,增幅较之前明显提高4倍以上。针对文章提出的系统,只要系统电压取220 V,合理设置网络参数,便能实现在CC,CV,MP3种状态下将3个MERS导通角α控制在40°(0.698 rad)以内,该种状态下,由MERS导致的输出畸变和电容峰值电压变化(整体最高为4.03%)便能忽略不计。

图8 电容峰值电压变化图Fig.8 Capacitance peak voltage variation diagram
参照图1搭建了LCL复合型结构无线电能传输装置的Simulink仿真模型来验证文章系统可行性,考虑到电磁影响以及电动汽车常用的无线传输频率,频率f选为13.56 kHz。电动汽车充电功率多为kW级,考虑到安全性,所以其模型参数选择如下:Us=220 V,MPS=28.27 μH,f=13.56 kHz,L20=24.22 μH,C0=3.54 pF,Ck1=15.76 nF,L10=26.39 μH,Ck2=25.13 nF,C10=10.44 pF,Ck3=15.76 nF,R1=50 Ω,CL=8.75 pF,LP=26.39 μH,L21=35.85 μH,LS=30.28 μH,RL=25~50 Ω。
当3个MERS的α分别为0°,18°,0°时,系统处于恒流输出状态,图9为其电流波形图。当RL=50 Ω时,系统开始充电直至稳定,此刻输出电流为6.713 A。将RL于0.001 s时切换为25 Ω,系统瞬间发生小幅度抖动,峰值电流为7.324 A,之后电流迅速稳定至6.718 A。切换RL前后电流变化率为0.07%,几乎可以忽略不计。
图9 CC模式系统输出电流波形Fig.9 Output current waveform of CC mode system
当3个MERS的α分别为37°,26.3°,18.9°时,系统处于恒压输出特性。该状态下的电压波形如图10所示。当RL=50 Ω时,系统开始充电直至稳定状态,此刻输出电压为180.56 V。将RL于0.001 s时切换为25 Ω,系统瞬间发生轻微波动,峰值电压为182.20 V,之后电压迅速稳定至177.95 V。切换RL前后电流变化率为1.45%,几乎可以忽略不计。

图10 CV模式系统输出电压波形Fig.10 Output voltage waveform of CV mode system
当互感MPS由28.27 μH逐渐减小时,副边采用定容量补偿的双LCL结构与文章系统的功率因数的变化作对比,如图11所示。前者随着MPS的减小,功率因数快速达到峰值0.81后,缓慢衰减至0.6。而本文系统,其功率因数基本维持在0.92左右。

图11 MPS变化时系统功率因数Fig.11 Power factor of system when MPS changes
通过上述的仿真结果可以得到在合理的参数设置下,控制3个MERS的α变化,系统便能有效地保持CC,CV,MP模式。并与文献[10]、文献[21]、文献[23]中3种模式的对比如表2所示。分析可得本文所提结构在CC,CV状态时的变化率明显低于其他3种模式,并且MP模式下功率因数最高且稳定。
表2 数据分析对比Tab.2 Data analysis and comparison
依据前文仿真参数搭建了实验平台进行验证。参照仿真步骤,调整好参数,进行多次试验取平均值,对CC状态下,RL为50 Ω与25 Ω时的电流进行了测试记录,如图12与图13所示,分析可得,切换电阻前后电流基本稳定在6.36 A与6.41 A左右,相比仿真数据差距为5.26%与4.58%,实验平台上电流变化率为0.79%,结果较为理想。

图12 RL=50 Ω时的电流Fig.12 Current at RL=50 Ω

图13 RL=25 Ω时的电流Fig.13 Current at RL=25 Ω
对CV状态下,RL为50 Ω与25 Ω时的电压进行了测试记录,如图14与图15所示。分析可得,切换电阻前后电压基本稳定在172.0 V与168.2 V左右,相比仿真数据差距为4.74%与5.47%,实验平台上电压变化率为2.24%,结果较为理想。将两线圈位置进行水平横移,对功率因数进行计算统计,结果如图16所示,分析可得,在互感系数发生变化时,该系统功率因数稳定在0.88左右,相比仿真数据差距为4.35%,结果较为理想。

图14 RL=50 Ω时的电压Fig.14 Voltage at RL=50 Ω

图15 RL=25 Ω时的电压Fig.15 Voltage at RL=25 Ω

图16 线圈偏移时的功率因数Fig.16 Power factor at coil offset
由实验平台上得出的上述实验数据可以看出,在一些不可控的外界条件影响和实际操作存在误差的情况下,3种状态下,CC模式与仿真差距为5.45%左右,CV模式与仿真差距为5.59%左右,MP模式与仿真差距为4.35%。装置整体表现良好。
5 结论
文章提出了一种LCL复合型磁耦合谐振式无线充电系统,该系统副边存在3个由MERS控制的补偿电容。
分析了CC,CV,MP3种状态下3个补偿电容的状态,通过对3个MERS导通角的控制,使得系统能实现3种工作状态。
对MERS的数学模型进行了分析,验证了其可等效为动态电容,寻找出了等效电容值与导通角的关系,通过相关计算能得到3种状态下3个补偿电容的电容值。
搭建了Simulink模型与实验平台,对系统进行了仿真与实验验证,由结果可以得到当采用LCL复合型结构时,合理设置参数,仿真环境下各个参数都优于其他3种结构,实验数据显示,CC模式下,仿真与实验差距为5.45%左右;CV模式下,差距为5.59%左右;MP模式下,功率因数差距为4.35%,充分证明了文章所提系统能有效实现CC,CV,MP 3种模式。
猜你喜欢
大电机技术(2022年4期)2022-08-30 01:38:30
莆田学院学报(2021年5期)2021-11-13 06:36:38
中国特种设备安全(2021年5期)2021-11-06 05:09:26
甘肃科技(2020年20期)2020-04-13 00:30:22
模具制造(2019年7期)2019-09-25 07:29:58
电测与仪表(2016年1期)2016-04-12 00:35:12
电源技术(2015年1期)2015-08-22 11:16:20
电源技术(2015年7期)2015-08-22 08:48:50
汽车维护与修理(2015年6期)2015-02-28 12:17:05
河南科技(2014年12期)2014-02-27 14:10:32