带有滞后补偿的改进型I—V下垂控制策略
2021-05-25 05:57:22
电气传动 2021年10期
(四川大学电气工程学院,四川 成都 610065)
微电网是实现新能源并网的有效途径之一,已引起了国内外学者的普遍关注。微电网按供电形式可分为直流微电网和交流微电网2种,相比于交流微电网,直流微电网在运行和控制上具有如下优势[1]:1)直流微电网使用变流器较少,降低了系统损耗并且无需考虑频率问题;2)能量的控制只取决于直流母线电压;3)电网中的直流负荷越来越多,直流微电网能更好地为用户提供方便快捷的直流电源,准确地把握到负荷的发展趋势。因此,直流微电网已成为微电网技术发展的主要方向[1-3]。
典型的直流微电网系统结构如图1所示,其由交流电网、分布式电源、储能单元和负荷四部分组成。图1中,虚线框部分的双向DC-DC变换器是储能单元与直流母线进行能量交换的重要环节。由于直流微电网配备有多个相互并联的储能单元,因此功率的分配成为能量管理的主要问题。

图1 典型的直流微电网系统结构图Fig.1 Typical configuration of a DC microgrid
目前,下垂控制方式是直流微电网中并联变换器实现功率均分的主要方式[4]。文献[5]提出了直流微电网的分层控制策略,将控制分为3层:第1层为下垂控制,实现功率均分;第2层为补偿控制,实现对下垂控制所产生电压偏差的补偿;第3层控制调节直流微网各个部分的功率流动。文献[6-14]中,直流微电网的多并联DC-DC变换器对储能单元进行充放电控制时,均使用传统的V—I下垂控制,实现功率均分。
传统的V—I下垂控制方法是在“电流内环-电压外环”双闭环的基础上,在电压外环添加带有虚拟阻抗的输出电流反馈,以实现功率均分。文献[15-16]中,并联变换器采用I—V下垂控制策略实现功率均分;在这种控制方法中,通过输出电压参考值、虚拟阻抗与输出电流的数学关系计算得到电流的参考值,代替V—I下垂控制策略的电压PI控制环,实现功率均分;I—V下垂控制策略相较于传统的V—I下垂控制策略少用1个PI控制器,实现方式简单,响应速度更快。
但是,I—V下垂控制会引起变换器启动时超调量过大。这种超调量是由于启动时,参考电压与实际电压相差过大引起的,一般可以通过对电压控制器的输出进行限制来减小超调。本文提出一种带有滞后补偿的改进型I—V下垂控制方法来减小启动时的超调量。改进的滞后补偿器并不会完全消除稳态误差,也会产生下垂控制的电压偏差,以达到功率均衡的目的,同时,滞后补偿器减小电压外环的带宽,消除了启动过程中的超调量,对I—V下垂控制进行优化。
为分析所提控制方法的正确性和优越性,首先建立DC-DC变换器的平均状态模型,通过小信号建模,研究3种下垂控制策略下变换器的稳定裕量和闭环带宽,对3种控制方式下的稳定性进行对比,最后通过实验对所提算法进行验证。
1 DC-DC变换器建模
将直流微电网中连接储能单元的DC-DC变换器单独取出,用直流电源代替直流母线为变换器供电,用电阻负载代替储能单元。DC-DC变换器的结构框图如图2所示。其中,us为直流电源,s1和s2为开关管,L为电感,RL为电感的寄生电阻,C为稳压电容,RC为电容的寄生电阻,R为负载电阻,iL为电感电流,uC为电容电压,io和uo分别为输出电流和输出电压。

图2 DC-DC变换器结构框图Fig.2 The block diagram of the structure for DC-DC convertor
DC-DC变换器的状态空间平均模型为

式中:x为状态变量;u为输入变量;d为开关管s1的占空比;A,B分别为系数矩阵。
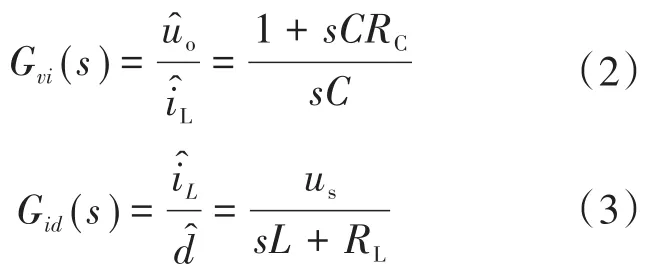
将状态空间平均方程线性化,加入扰动量,进行拉普拉斯变换,求得电感电流iL到输出电压uo的传递函数Gvi(s)和占空比d到电感电流iL的传递函数Gid(s),分别为
2 下垂控制策略
2.1 V—I下垂控制
在直流微电网中,传统的下垂控制方式是V—I下垂控制,通常采用“电流内环-电压外环”的双闭环,在电压外环上外加虚拟阻抗反馈回路的控制策略,控制结构框图如图3所示。

图3 V—I下垂控制结构框图Fig.3 The block diagram of structure for V—I droop control
图3中,uref为输出电压参考值;GPI_U(s)为电压外环比例积分(PI)控制器的传递函数;GPI_I(s)为电流内环PI控制器的传递函数;Gdealy=e-sTd为控制延时对应的传递函数,Td与采样周期Ts相等;Gm(s)为PWM脉冲调制器的传输延时对应的传递函数,Gm(s)=e-0.5sTd;Kdroop为下垂系数;uo为变换器的输出电压。
图4为电压—电流线性关系图。

图4 电压—电流线性关系图Fig.4 Linear relationship between voltage and current
由图4可知,Kdroop为电压电流线性关系的斜率,可表示如下:

式中:umin为输出电压允许偏差的最小值;imax为输出电流最大值。
变换器的输出电压可以表示为

2.2 I—V下垂控制
直流微电网中另一种下垂控制方式是I—V下垂控制,通常采用电流内环,用电压、电流的线性关系求得内环电流的参考值,代替电压外环和下垂控制回路的控制策略,这种控制方式相较于传统的V—I下垂控制,少用了1个PI控制器,控制方法相对简单,控制结构框图如图5所示。图5中,k为比例系数。
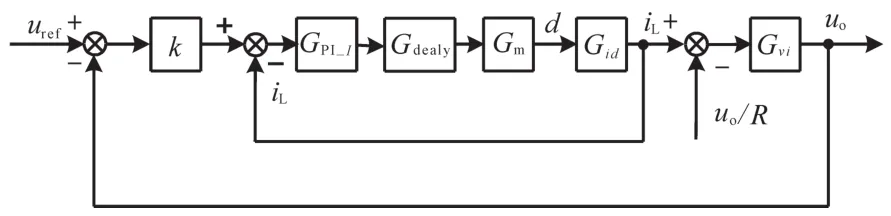
图5 I—V下垂控制结构框图Fig.5 The block diagram of the structure for I—V droop control
电流—电压的线性关系如图6所示,其中,uref为输出电压参考值,umin为输出电压允许偏差的最小值,imax为输出电流最大值。

图6 电流-电压线性关系图Fig.6 Linear relationship between current and voltage
由图6中电流—电压的线性关系可以求得电流i为

2.3 带有滞后补偿的改进型I—V下垂控制
I—V下垂控制利用电压电流之间比例关系代替电压外环PI控制和下垂控制回路,少用了1个PI控制器,简化了控制方式,但是会在DC-DC变换器启动时引起较大的超调量。为了消除这种启动的过大超调量,在控制算法中加入滞后补偿器。所提算法无需加入限幅器,达到消除超调的目的,其控制结构框图如图7所示。

图7 带有滞后补偿的I—V下垂控制结构框图Fig.7 The block diagram of the structure for I—V droop control with lag compensator
图7中,Gc(s)为改进后带有滞后补偿器的电压控制环,可以表示为

式中:k由式(6)可得,为滞后补偿器的增益;ωz和ωp分别为在紧靠原点附近添加的一对开环零点z和极点p所在的角频率,其中极点在零点的右侧。
与传统的滞后补偿器不同的是,传统的滞后补偿器由零极点分布控制增益和带宽,而本文所用的Gc(s)补偿器仅由系数k提供增益,由ωz和ωp控制带宽。
3 下垂控制策略性能分析
本文从输出电压的开环传递函数得到伯德图的稳定裕量,以及电流内环和电压外环闭环传递函数的带宽两个方面对3种下垂控制的性能进行对比分析,其中,3种下垂控制方法电流内环的PI控制器采用同一组参数。
DC-DC变换器电路参数设置如下:输入电压us=100 V;输出电压参考值uref=50 V;电感L=3 mH;电感电阻RL=0.01 Ω;电容C=2 000 μF;电容电阻RC=0.03 Ω;负载电阻R=10 Ω。DC-DC变换器控制参数设置如下:开关频率fs=10 kHz;电流环比例系数kp_i=0.15;电流环积分系数ki_i=80;电压环比例系数kp_u=69.6;电压环积分系数ki_u=101.4;归一化参数k1=0.02,k2=0.2;下垂系数Kdroop=0.1;补偿器零点频率ωz=250 rad/s;补偿器极点频率ωp=20 rad/s。
3.1 V—I下垂控制
由图3可得,DC-DC变换器电流内环的闭环传递函数Gi(s)表示为

将前文设置的参数代入式(8)中,绘制出电流内环的闭环幅频和相频特性曲线如图8所示。由图8可得,在504 Hz时,幅值增益下降3 dB,电流内环的带宽为504 Hz。
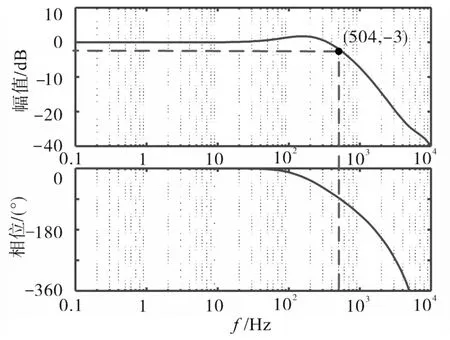
图8 电流内环闭环频率特性曲线(V—I)Fig.8 The frequency characteristic curves of inner current closed-loop(V—I)
DC-DC变换器电压外环的闭环传递函数Gv(s)表示为

为求得DC-DC变换器电压外环的带宽,令电流内环闭环传递函数Gi()s=1,得到传递函数Gvb(s):

将前文设置的参数代入式(10)中,绘制出电压环在Gi(s)=1时,闭环幅频和相频特性曲线如图9所示。

图9 电压外环闭环频率特性曲线(V—I)Fig.9 The frequency characteristic curves of outer voltage closed-loop(V—I)
由图9可得,在53.4 Hz时,幅值增益下降3 dB,电压外环的带宽为53.4 Hz。
DC-DC变换器输出电压uo的开环传递函数Gk(s)表示为

将前文设置的参数代入式(11)中,绘制出电压外环的开环幅频和相频特性曲线如图10所示。由图10可得,在61.4 Hz时,幅值增益穿越0 dB线,相角裕量为91.6°,系统稳定。
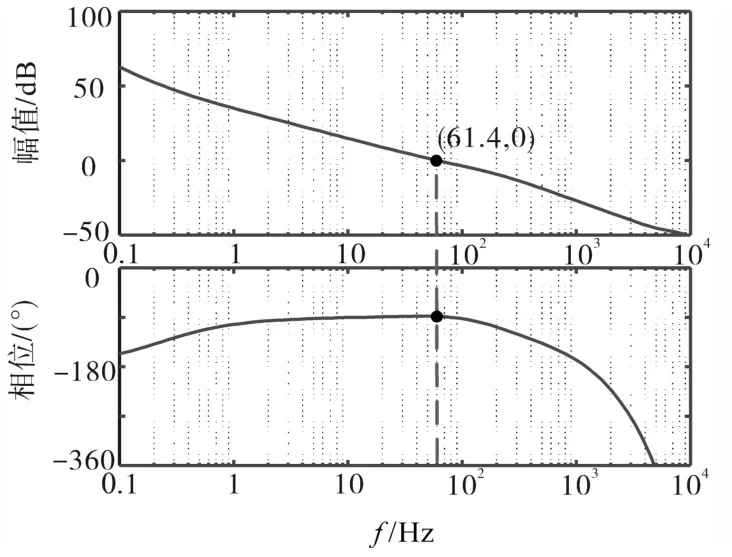
图10 电压外环开环频率特性曲线(V—I)Fig.10 The frequency characteristic curves of outer voltage open-loop(V—I)
3.2 I—V下垂控制
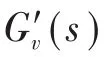



图11 电压外环闭环频率特性曲线(I—V)Fig.11 The frequency characteristic curves of outer voltage closed-loop(I—V)

将前文中设置的参数代入式(14)中,绘制出电压外环的开环幅频和相频特性曲线如图12所示。由图12可得,在581.4 Hz时,幅值增益穿越0 dB线,相角裕量为6.5°时系统稳定,但稳定裕量很小。
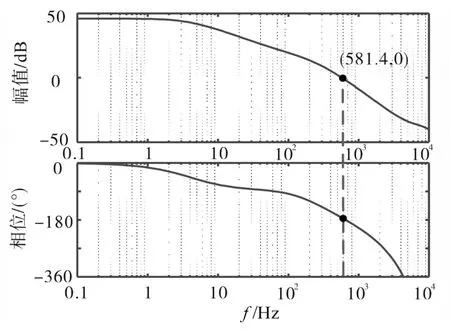
图12 电压外环开环频率特性曲线(I—V)Fig.12 The frequency characteristic curves of outer voltage open-loop(I—V)
3.3 带有滞后补偿的改进型I—V下垂控制





图13 电压外环闭环频率特性曲线(改进I—V)Fig.13 The frequency characteristic curves of outer voltage closed-loop(improved I—V)


将参数代入式(17)中,绘制出电压外环的开环幅频和相频特性曲线如图14所示。由图14可得,在81.3 Hz时,幅值增益穿越0 dB线,相角裕量为60.4°,系统稳定。

图14 电压外环开环频率特性曲线(改进I—V)Fig.14 The frequency characteristic curves of outer voltage open-loop(improved I—V)
综上对3种下垂控制方式的带宽和稳定性分析,在电流内环完全相同的情况下,传统的V—I下垂控制方式的电压外环的带宽最小,约为54.3 Hz,但其具有最高的稳定性,稳定裕量约为91.6°;传统的I—V下垂控制下,虽然电压外环带宽最大,约为684.7 Hz,但其稳定性最差,稳定裕量约为6.5°;带有滞后补偿的I—V下垂控制下,电压外环的带宽相较于传统V—I下垂控制,由54.3 Hz增加到94.7 Hz,加快了系统的响应速度,系统的相角裕量相较于传统的I—V下垂控制,由6.5°增加到60.4°,提高了系统的稳定性。
4 实验验证
为了验证带有滞后补偿的DC-DC变换器I—V下垂控制策略的有效性,对所提算法进行了小功率实验测试,实验平台如图15所示,核心控制器为TMS320F28335。实验系统参数与第3节设置相同。
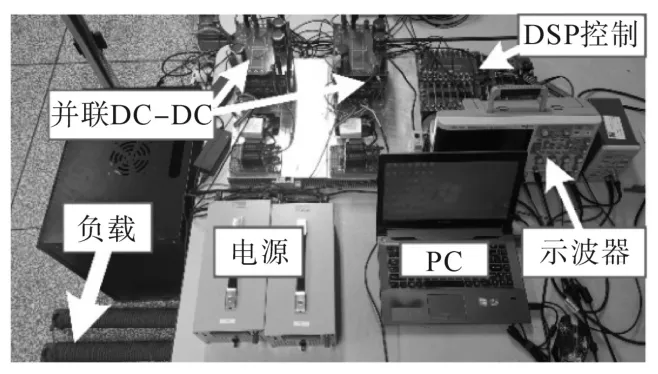
图15 样机实验平台Fig.15 Experiment setup of the prototype
图16为并联DC-DC变换器在传统V—I下垂控制下的输出电压电流动态实验波形。

图16 传统V—I下垂控制下电压电流动态实验波形Fig.16 Transient waveforms of uoand ioby the V—I droop control
由图16可知,在启动后约0.8 s后(t1处),输出电压uo稳定在49 V,电流io1稳定在4.7 A;在t2处,并入变换器2,输出电压uo阶跃到49.5 V,经过大约8 s,实现均流。在图中虚线框中,io1和io2在t2时刻都有电流突变,这是由于在并入变换器2前,变换器1已实现下垂控制,存在电压偏差,变换器2控制中,iL2为0,输出电压等于参考电压50 V,因此在并入变换器2的t2时刻,电流发生突变。
图17为并联DC-DC变换器在I—V下垂控制下,输出电压电流动态实验波形。
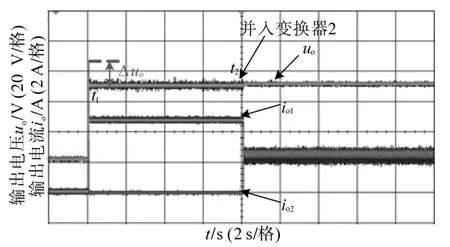
图17 I—V下垂控制下电压电流动态实验波形Fig.17 Transient waveforms of uoand ioby I—V droop control
由图17可知,在启动时刻,输出电压同时达到49 V稳定值,电流io1稳定在4.7 A左右,但是在启动时刻,存在较大超调量Δuo,图18为启动过程电压放大图。
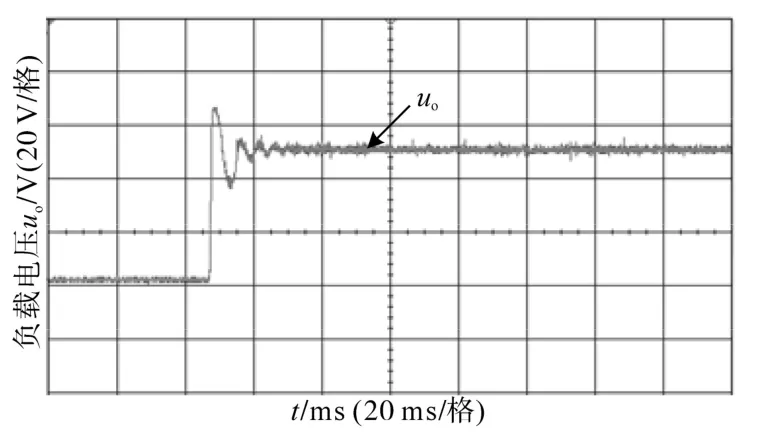
图18 I—V下垂控制下启动过程电压波形Fig.18 Transient waveforms of the start-up uoby I—V droop control
由图18可知,超调量超过20%;在t2时刻,并入变换器2,输出电压uo阶跃到49.5 V,同时完成均流;与图16相比可知,I—V下垂控制相比于传统的V—I下垂控制,响应速度很快,但在启动时产生较大的超调量,在并入变换器2后,虽然均流速度很快,但是明显电流波动更大,稳定性降低。
图19为并联DC-DC变换器在带有滞后补偿的I—V下垂控制下输出电压电流动态实验波形。

图19 改进的I—V下垂控制下电压电流动态实验波形Fig.19 Transient waveforms of uoand ioby improved I—V droop control
由图19可知,在启动后约0.3 s后(t1处),输出电压uo稳定在49 V,电流io1稳定在4.7 A;在t2时刻,并入变换器2,输出电压uo阶跃到49.5 V,经过大约50 ms,实现均流。与图16相比,系统的响应速度由0.8 s变为0.3 s,均流速度由8 s变为50 ms。与图17相比,在启动过程中不存在超调,在并入变换器2后,电流的波动明显减小,系统的稳定性明显提高,与理论分析一致。
5 结论
本文提出了带有滞后补偿的改进型I—V下垂控制策略,分析了所提算法响应速度及稳定性。相较于传统的控制策略,所提算法具有以下优点:
1)相比于传统的V—I下垂控制策略,所提算法在少用一个PI控制器的情况下,提高了系统的响应速度和均流速度,并有效地实现了功率的自动均衡。
2)相比于传统的I—V下垂控制策略,所提算法在消除过大的启动超调量、提高系统稳定性的同时,有效地实现了功率的自动均衡。
猜你喜欢
包装工程(2023年16期)2023-08-25 11:39:16
湖南电力(2021年4期)2021-11-05 06:44:50
石油沥青(2021年1期)2021-01-11 05:41:31
中医眼耳鼻喉杂志(2019年2期)2019-04-13 05:23:50
电子制作(2017年2期)2017-05-17 03:55:29
腹腔镜外科杂志(2016年11期)2016-06-01 12:10:09
腹腔镜外科杂志(2016年12期)2016-06-01 12:10:09
通信电源技术(2016年1期)2016-04-16 04:57:32
焊接(2015年5期)2015-07-18 11:03:41
电测与仪表(2014年20期)2014-04-04 11:57:54