模型参数扰动对模型预测控制的影响分析
2021-05-25 05:57:22
电气传动 2021年10期
(郑州铁路职业技术学院电气工程学院,河南 郑州 454000)
近年来,模型预测控制在电力电子与电力传动领域得到了广泛的关注[1-2],应用场景包括电机驱动[3]、逆变器[4]、电力电子变压器[5]和矩阵变换器[6]等。通常,根据产生控制功率开关的脉冲控制信号的不同,模型预测控制技术可分为两类,一类利用预测算法产生连续输出作为调制参考,进而基于脉宽调制(pulse width modulation,PWM)模块生成固定开关频率的脉冲控制信号[7],而另一类模型预测控制直接剔除PWM模块,使用有限的开关状态进行成本函数评估,选择最优开关状态进行输出即可,故也称为有限集模型预测控制(finite control set model predictive control,FCSMPC)[8]。
FCSMPC的优点主要体现在具有快速的动态响应、实现简单以及可直接处理非线性和多目标约束等[9]。但直接使用系统模型来选择最优控制输出会存在建模误差或参数变化使控制性能发生变化的缺点。因此,误差分析仍是FCSMPC研究中的一个重点问题[10]。此外,由于FCSMPC的非线性特性,使得线性系统中相关参数扰动的评估分析方法不再适用。有文献通过研究FCSMPC在不确定情景下的行为,从而基于经验评估了模型参数不匹配对控制性能的影响,这些研究涉及的应用对象包括整流器[11]、三相电压源型逆变器[12]和电机驱动变频器[13]等。文献[14]对电感参数变化进行了定性分析,并推演出指南以指导减少电感参数不匹配对控制性能影响。而对于负载电阻参数的不确定性,通常将其对FCSMPC运行的影响进行忽略[14-15]。文献[16]则是关注了负载参数不匹配下对FCSMPC控制性能的影响,并设计了改进方案,但其运算量大、对系统处理器要求较高。上述这些研究主要还是集中在定性分析层面,没有深入探究参数扰动对FCSMPC运行的影响。此外,研究手段也是主要依靠经验来对参数扰动的影响进行评估。本文通过数学推导,得到模型参数扰动对FCSMPC控制性能影响的解析表达式,进而可实现模型参数扰动对FCSMPC控制性能影响的定量评估。其中研究对象为三相逆变器的模型预测电流控制器。最后,基于实验验证了研究结果。
1 逆变器系统模型和FCSMPC方案
下面引出逆变器数学模型及对应的FCSMPC。同时,为了对比,也对传统基于空间矢量调制和PI控制器的线性电流控制方案进行了回顾。
1.1 逆变器数学模型
图1为三相逆变器的电路模型。
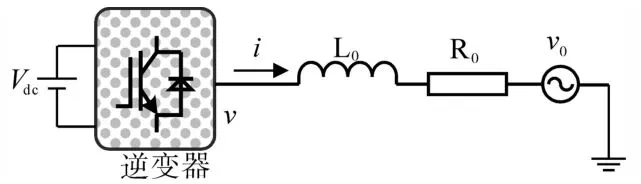
图1 三相逆变器的电路模型Fig.1 Circuit model of three-phase inverter
由图1可得三相逆变器的动态模型表述为

式中:v为逆变器输出电压矢量;va,vb,vc分别为逆变器三相输出电压;i为逆变器输出电流矢量;ia,ib,ic分别为逆变器三相输出电流;L0,R0分别为电感和电阻;v0为电压源矢量。
三相两电平逆变器具有6个非零电压矢量和2个零电压矢量。此外,式(1)可扩展至具有任意电平数和不同相数的逆变器,仅对应逆变器拓扑而改变输出电压矢量即可。另一方面,式(1)中的数学模型即可表示逆变器带交流电机负载或逆变器并网,前者电感和电阻元件即代表定子或转子等效电感和电阻参数,电压源矢量对应于电机反电动势;而后者电感和电阻元件对应为滤波器和线路阻抗建模,电压源矢量则代表电网电压。设采样周期为Ts,使用前向欧拉方法进行离散化,可得到离散模型如下:


1.2 FCSMPC算法
FCSMPC算法执行时,在每个采样周期将计算选择要应用于逆变器的最优开关状态组合进行输出。这是通过系统数学模型来预测和比较每个有效控制动作的行为来实现的,这些动作即是逆变器的输出电压矢量状态。预测通常可在一个或多个采样周期范围内进行,当选择两步长预测时,意味着在第(k+2)个采样时刻进行评估预测,这样做的优点在于可以补偿预测控制器中数字化实现所带来的不可避免的计算延迟。完成预测后,根据所需的控制目标和约束设计定义成本函数并应用于该组预测,并评估各个控制动作,以选择最优电压矢量输出。本文使用的成本函数旨在实现负载电流参考值跟踪,如下式所示:

通过对式(2)迭代即可得到:

1.3 线性电流控制方案
为了评估建模中参数扰动对FCSMPC控制性能的影响,将FCSMPC方案与基于空间矢量调制和PI控制器的线性电流控制方案进行比较。线性电流控制器在同步旋转d-q坐标系中实现,可实现零稳态误差,同时可通过设置前馈项剔除由电感引起的交叉耦合效应。
在s域中PI控制器的传递函数如下:
式中:C(s)为PI控制器的传递函数;Kp,Ki分别为比例和积分系数。
对PI参数的设定问题,文献[17]依据系统动态和延迟所带来的约束下尽可能地扩展闭环系统带宽的原则进行参数选择,称为幅值最优参数整定流程。采用此流程整定参数的线性电流控制方案可与FCSMPC方案进行合理对比,因为FCSMPC具有较为快速的动态响应。为了整定线性电流控制器参数,考虑标称负载参数R0和L0所对应的动态特性后设置积分系数Ki=L0/R0,此时控制器的零点将抵消来自模型中的主极点。进一步设置比例系数Kp=L0/(2T0),T0为调制和控制算法数字实现引入的等效延迟,该延迟可近似为T0=1.5TSVM,TSVM为空间矢量调制算法中的采样周期。
如上所述,线性电流控制方案的设计过程也是取决于模型参数。因此,参数不确定性的存在也将影响线性控制器的性能。就稳态性能而言,线性电流控制中的积分项将考虑到负载参数的变化,从而获得零稳态误差,但负载参数与其标称值不同时,控制器设计的零极点对消不再成立,这将引起闭环响应中更高阶动态的出现,从而恶化动态响应。
2 模型参数扰动对FCSMPC的影响分析


在下述分析中,为了使表达式更为简单和紧凑,只分析一步预测的情形,但分析结果可扩展到具有两步预测的情况。
定义预测误差如下:

式中:Δ为预测误差,代表了无参数扰动模型预测的电流值与含参数扰动的模型预测的电流值之间的差值。
将式(2)和式(6)代入到式(7)中可得:



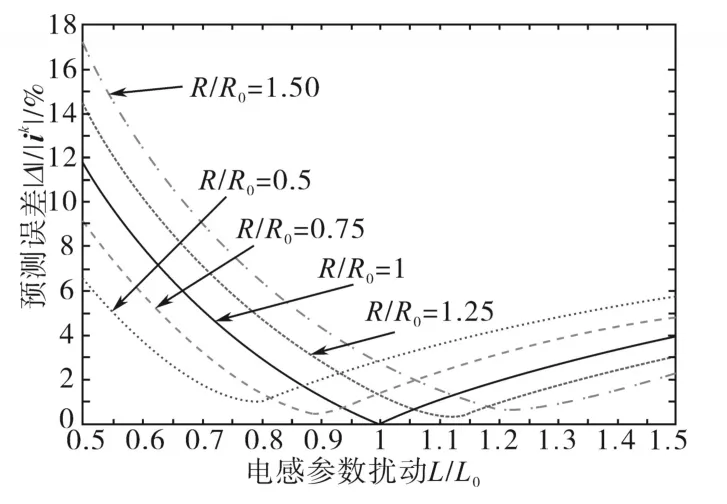
图2 负载参数扰动时的预测误差变化曲线Fig.2 Prediction error curves with load parameters disturbance



图3 矢量相角变化时的预测误差变化曲线Fig.3 Prediction error curves with vector phase angle changed
3 实验验证
为了验证上述模型参数扰动对FCSMPC算法的影响分析,搭建了如图4所示的实验平台,开展了相关实验以说明负载电阻和电感参数扰动对FCSMPC控制性能的影响。实验采用了FCSMPC控制方案与线性电流控制方案对比的方式进行。图4中主要的实验装置包括一台型号为丹佛斯VLT5008的电压源型三相逆变器、三相阻感负载、dSPACE1103实时仿真系统和上位机。其中FCSMPC算法和线性控制算法均基于dSPACE1103实时控制器实现。线性电流控制器中空间矢量调制模块的采样周期TSVM=250 μs,故FCSMPC控制器中的采样周期设置为Ts=50 μs,这使得在标称负载参数条件下获得的平均开关频率与线性电流控制器相当。实验系统其他主要参数为:直流侧电压Vdc=100 V,直流链路电容Cdc=2 400 μF,逆变器额定输出电流inorm=5.5 A,额定频率fnorm=50 Hz,标称负载电阻R0=10 Ω,标称负载电感L0=10 mH,负载反电动势幅值VEM=2 V,负载反电动势频率fEM=50 Hz,采样周期Ts=50 μs。

图4 实验装置构成Fig.4 Composition of experimental devices
3.1 负载参数扰动下的稳态性能分析
首先,基于实验平台进行了稳态实验,FCSMPC控制器中的电感参数设置为L0=10 mH,而实际负载电感分别设置为5 mH,10 mH和15 mH。实验中设置不同的电流参考值,并同时进行了线性电流控制器的测试。图5为负载电感参数误差下的实验结果汇总。
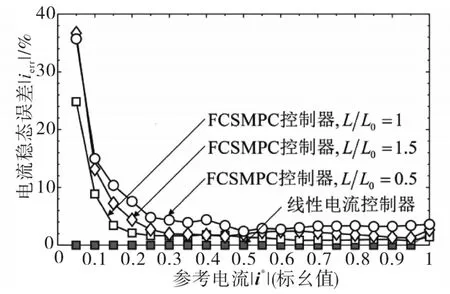
图5 负载电感参数误差下的实验结果汇总Fig.5 Summary of experimental results under load inductance parameter error
由图5可知,线性电流控制器能够在所有测试条件下实现零稳态误差,这是因为其设置了积分项。另一方面,FCSMPC控制器在|i*|低于0.2(标幺值)时具有更大的稳态误差,即使实际负载电感参数与模型参数保持一致,这是因为FC-SMPC控制器中仅仅将电流跟踪作为控制目标导致的。此外,负载电感参数误差对预测控制器的稳态误差有一定的影响,并在实际电感值低于模型中电感值的情况下趋于严重。
与负载电感扰动类似,将FCSMPC控制器中的电阻参数设置为R0=10 Ω,而实际负载电阻分别设置为5 Ω,10 Ω和20 Ω进行了第二组测试,实验结果如图6所示。图6实验结果显示,与负载电感参数扰动的情况不同,当R/R0=2且参考电流增大时,线性电流控制器出现饱和导致了较大的稳态误差,但对应FCSMPC在此种情况下具有更小的稳态误差,因为其受线性调制范围限制。同时类似于电感参数扰动,FCSMPC的稳态误差也受电阻参数扰动的影响,并在参考电流较小的情况下更为严重。

图6 负载电阻参数误差下的实验结果汇总Fig.6 Summary of experimental results under load resistance parameter error
进一步设置两组负载参数扰动,即L/L0=1.5和R/R0=2,以及L/L0=0.5和R/R0=0.5,进行输出电流总谐波含量iTHD的对比分析,结果如图7所示。

图7 负载参数扰动下的电流谐波分析Fig.7 Current harmonic analysis under load parameters disturbance
图7中,负载参数扰动对FCSMPC控制器和线性电流控制器的稳态谐波控制性能均有负面影响,因为负载电阻和电感参数决定了负载电流的动态特性,从而影响了与谐波含量密切相关的纹波特性。图7a为L/L0=1和R/R0=1时,即参数准确的情况下逆变器输出电流参考值不同时的iTHD,图7b为L/L0=1.5和R/R0=2时,即建模参数偏小的情况下的iTHD分布,对比两者可看出,实际负载参数大于模型参数时,输出电流THD是减小的。图7c为L/L0=0.5和R/R0=0.5时,即建模参数偏小的情况下的iTHD分布,对比图7b可看出,两种控制器的输出电流THD都将显著增大。
3.2 负载参数扰动下的动态性能分析

图8、图9分别为FCSMPC控制器和传统线性电流控制器在不同负载电感参数扰动下的a相参考电流ia阶跃动态响应结果。由于实际电感参数对电流滤波特性有很大影响,故图8c和图9c中的电流纹波较大,同时FCSMPC控制器更为明显。如前述分析,当建模电感参数大于实际负载电感时,FCSMPC的预测误差将受到更大影响,图8c中的实验结果也证实了这一论述。尽管随着负载电感参数的扰动,FCSMPC出现了明显的电流纹波,但FCSMPC的动态响应基本不受影响。但根据图9所示的实验结果显示负载电感参数的扰动对线性电流控制器的动态响应造成了不利影响,这是因为线性电流控制器的控制参数是基于负载参数整定的。综上,图8、图9实验波形表明,FCSMPC控制器和传统线性电流控制器相比,在涉及负载电感参数较大扰动,即L/L0=0.5时,FCSMPC出现了明显的电流纹波,即谐波增多、稳态性能欠佳,其原因是实际电感值低于模型中电感值的情况下,FCSMPC控制器每个步长的预测误差偏大,从而在成本函数计算时,有一定的概率没有得到最优的电压矢量进行输出,从而造成了谐波性能下降。但是FCSMPC控制器的动态性能并没有受到影响,反之传统线性电流控制器在涉及负载电感参数较大扰动时,电流纹波较小,即谐波增加不明显,但是动态性能受到影响。

图8 负载电感参数扰动下的动态响应(FCSMPC控制器)Fig.8 Dynamic response under disturbance of load inductance parameters(FCSMPC controller)

图9 负载电感参数扰动下的动态响应(线性电流控制器)Fig.9 Dynamic response under disturbance of load inductance parameters(linear current controller)
图10、图11分别为FCSMPC控制器和传统线性电流控制器在不同负载电阻参数扰动下的a相参考电流阶跃动态响应结果。

图10 负载电阻参数扰动下的动态响应(FCSMPC控制器)Fig.10 Dynamic response under disturbance of load resistance parameters(FCSMPC controller)

图11 负载电阻参数扰动下的动态响应(线性电流控制器)Fig.11 Dynamic response under disturbance of load resistance parameters(linear current controller)

对比图10、图11可以看出,在不同负载电阻参数扰动下,包括参数匹配的情况下,FCSMPC的动态响应是明显快于线性电流控制器的。同时,如图11c所示,当负载电阻参数只有其标称值的50%时,线性电流控制器的动态响应呈现出更高的超调和振荡。综上,图10、图11实验波形表明,FCSMPC控制器和传统线性电流控制器相比,在涉及负载电阻参数较大扰动时,两者的稳态性能没有受到太大影响,但是传统线性电流控制器出现了较大的超调和振荡,故动态性能明显不如FCSMPC控制器。
4 结论
本文研究了模型参数扰动对FCSMPC控制策略的影响,研究基于三相二电平逆变器的电流预测控制开展,现总结主要结论如下:
1)理论推导表明,FCSMPC的预测误差不仅取决于模型中各个负载参数的不确定性,还取决于逆变器当前步长的负载电流值和输出电压值,尤其是当2个矢量方向完全相反时,预测误差达到最大。
2)通过与线性电流控制器的对比动静态实验结果表明,在负载电阻参数扰动下,FCSMPC的稳态误差将增加,而负载电感参数的变化导致较大的电流纹波,尤其在预测模型高估实际电感值时趋于严重。但当负载参数不匹配的情况下,FCSMPC的动态阶跃响应比线性电流控制器的鲁棒性更好。
考虑到模型中电感值与实际电感值不匹配导致FCSMPC控制器预测误差偏大,进而使得稳态性能下降的问题,进一步的研究方向为:在FCSMPC控制器每次迭代中计算预测误差,优化电压矢量输出,从而改善和加强控制器的鲁棒性。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
延安大学学报(自然科学版)(2021年3期)2021-10-13 13:51:02
数学物理学报(2019年4期)2019-10-10 02:38:56
通信电源技术(2018年5期)2018-08-23 01:16:12
大连理工大学学报(2017年6期)2017-11-22 10:00:11
中学物理·高中(2016年12期)2017-04-22 11:43:09
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2015年11期)2015-08-22 08:50:38
电测与仪表(2015年16期)2015-04-12 00:44:38
电测与仪表(2014年13期)2014-04-04 12:04:16