
基于ARMA模型船摇预报的船用稳定平台PID控制算法研究❋
2021-05-25 10:50:26张凯临李玉超
中国海洋大学学报(自然科学版) 2021年7期
张凯临, 李玉超
(中国海洋大学信息科学与工程学院, 山东 青岛 266100)
稳定平台是一种能够隔离运动载体扰动,使负载保持稳定姿态的装置,它在军事、科研等领域都有广泛的应用。稳定平台的控制算法大多数采用PID控制算法,它具有形式简单,使用方便可靠等优点,船用稳定平台对于稳定精度要求较高,然而传统PID控制器在闭环调节中存在固有的时滞会制约稳定平台稳定精度的提升,特别是在陀螺仪姿态数据报告频率较低的情况下,时滞将十分突出,严重影响稳定性能[1]。在真实环境中稳定平台受到的干扰来自船的姿态变化,而船的姿态又可以依靠历史数据通过算法来预测,因此当姿态传感器周期性地报告船的姿态信息时,通过预测可以得到稳定平台下一时刻受到的干扰。有学者提出利用AR预测模型对被控对象进行预测,并将预测信息作为PID控制器的输入,用来消除时滞对系统产生的不良影响[2-3]。本文使用ARMA模型对船的姿态进行预测,利用预测值的均方误差最小的原则确定模型阶数和单次预测所使用样本数,然后以船用串联式稳定平台为实验装置,通过运动模拟平台来创造一个相对真实的船摇运动环境,在控制算法中将预测得到的干扰信息和当前的误差信息一起施加到PID控制器中,使PID控制器的调节过程提前一个时刻,目的是从原理上减小时滞,提高船用稳定平台的稳定精度。
1 船摇预报ARMA模型建模
在海上,船的姿态受到风、浪等多种因素的影响,基于时间序列分析的线性自回归移动平均(ARMA)模型预测方法认为船的姿态与过去的姿态存在某种联系,而且基于船的运动是平稳的窄带随机过程的假设[4-5]。ARMA模型不依赖外界因素对船的干扰信息,不需要建立精确的物理模型,仅仅依靠船运动姿态的历史数据就可以完成单步或多步预测,有效预报时间可达数秒[6]。它是一种结合了自回归模型(AR)和移动平均模型(MA)的混合模型,最初是为了解决有时需要高阶AR或者MA模型才能充分描述数据动态结构的问题,基本思想是将两模型相结合使模型阶数保持很小,这将有助于减小模型的计算量[7]。
1.1 模型的定义
中心化ARMA模型的形式为
(1)
其中:{xt}表示船的姿态时间序列数据;{εt}为白噪声序列,实验中为模拟船姿态的真实值与ARMA模型预测值之差,αi(i= 1,2,…,p)和βi(i= 1,2,…,q)为模型参数;p为AR模型部分的阶数;q为MA模型部分的阶数[7-8]。通常p和q都应当选取大于等于1的整数,但是若使q取0,则意味着去除MA模型部分的作用,ARMA模型将变为纯AR模型,也可看做ARMA模型的一种特殊形式。
1.2 模型的定阶与样本数的选择
对于给定的数量为N的样本,ARMA模型确定阶数p和q的方法有残差平方和准则、AIC准则、BIC准则等。
残差平方和:
(2)
AIC准则函数:
(3)
BIC准则函数:
(4)

(5)

1.3 模型的参数估计
ARMA模型的参数估计方法常用的有最小二乘估计法、矩估计法和极大似然估计法,其中矩估计法由于没有充分利用样本信息,所以估计精度一般不高,极大似然估计法求解过程比较复杂,相对而言最小二乘估计法的算法实现较为简单,估计精度也较高,故本实验采用的是最小二乘估计法[11]。设有样本序列x0,x1,x2,…,xn和误差序列ε0,ε1,ε2,…,εn,则ARMA模型的矩阵形式为:
(6)
其中
模型的残差平方和为:
(7)
使S(p,q)取最小值求α和β的过程,即α和β的最小二乘估计法,则所求参数为:
(8)
1.4 模型的预测
对于样本序列x0,x1,x2,…,xn和误差序列ε0,ε1,ε2,…,εn,根据所求参数α和β,则下一时刻样本序列的预测值为
(9)
2 基于ARMA模型的稳定平台PID控制器设计
基于ARMA模型的离散式PID控制器表达式为:
(10)
其中:k为样本序号;T为样本间隔时间;e(k)为k时刻的偏差信号;Kp、Ki、Kd分别为比例、积分、微分参数值[12]。改进的稳定平台PID控制器的原理如图1所示。

图1 基于ARMA模型的PID控制器原理框图
稳定平台上安装了两个陀螺仪模块,一个用来测量稳定平台支架也是船的姿态信息,另一个用来测量稳定平台承载面的姿态信息同时也是负载的姿态信息。对于单个自由度,图中稳定平台承载面姿态角的期望值r(k)为零,e(k)为PID控制器的误差输入,u(k)为控制量输出,y(k)为负载的倾斜角。该控制器在传统PID控制器的基础上增加了ARMA模型预测算法,其输入为船的倾斜角θ(k),模型将记录此数据以便得到一定数量的历史数据,然后由该数据进行单步预测得到下一时刻倾斜角的预测值θ′(k+1)。再减去θ(k)得到船下一时刻将对负载造成的倾斜角变化,然后加上y(k)得到下一时刻负载的预测倾斜角y′(k),最后再与设定的期望值r(k)做差求出e(k),即e(k) =r(k)-[θ′(k+1)-θ(k) +y(k)]。这样施加到PID控制器的输入实际上含有超前信息,通过参数调整可以使PID控制器的输出消除下一时刻将要产生的误差,在理想情况下能够实现控制对象的实际值y(k)与期望值r(k)时刻保持相等。
3 实验设计与结果分析
为了验证加入ARMA模型是否能够改善系统时滞并提高稳定平台的稳定精度,针对稳定平台的某一个自由度设计了两组对照试验,第一组实验没有ARMA模型的作用,PID控制中的y′(k)完全来自实测,即等于y(k),第二组有ARMA模型的参与,y′(k)等于θ′(k+1) -θ(k) +y(k),实验的原理框图如图2所示,图3为稳定平台实物。稳定平台固定在运动模拟平台上面受到姿态干扰,陀螺仪报告姿态信息的频率为10 Hz,即数据序列的时间间隔为100 ms。在对照实验之前,首先需要通过分析数据来确定ARMA模型的阶数p和q以及样本数N。PID控制器的性能一般可以通过阶跃响应曲线或者正弦干扰响应曲线来反映[13],对照实验中先通过观察正弦干扰时的稳定误差曲线来调整PID的参数,并对时滞现象和ARMA模型的作用进行分析,最后通过模拟的船摇运动干扰实验来验证稳定平台的实际稳定效果。
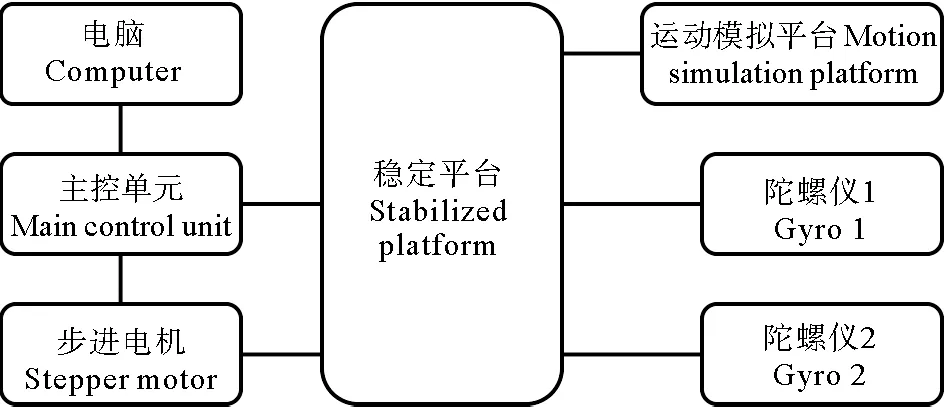
图2 实验原理框图
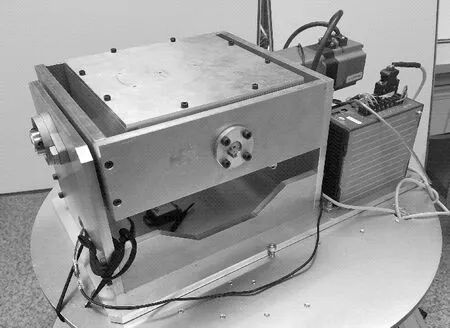
图3 稳定平台实物图
3.1 ARMA模型阶数与样本数N的确定实验
模型预测的准确度是影响稳定平台稳定精度的关键因素,实验采集了3 000个模拟船摇运动时间序列姿态测量数据,通过计算机模拟稳定平台中的模型预测过程并进行数据分析。分析流程大概为,首先确定N的值,借助式(5)寻找出使均方误差最小的p和q,然后让N以20为一梯度增加,通过相同方法可得到所有的实验结果(见表1)。容易看出当取值为120时均方误差出现了极小值,故而选择ARMA模型的p=4,q=2,N=120。值得注意的是,随着样本数N的增加, 均
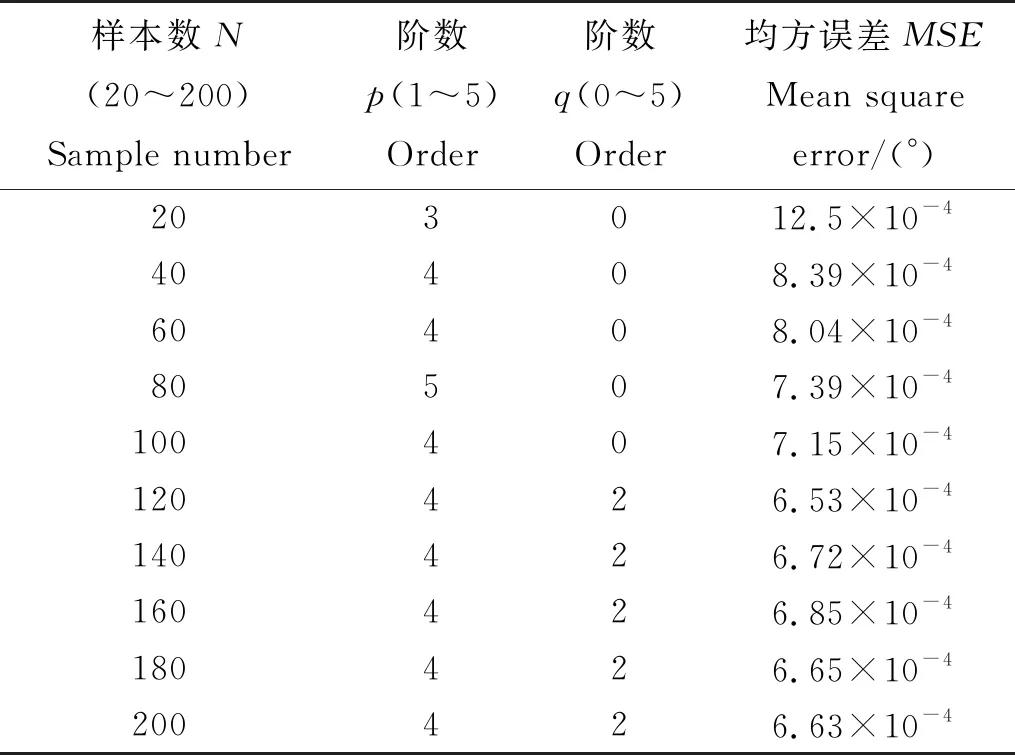
表1 ARMA模型阶数与样本数N的确定实验结果
方误差的趋势并非平稳下降,所以样本数N=120时的均方误差很有可能为局部极小值,当然考虑到稳定平台的硬件性能有限,当模型的阶数和样本数N较大时如果单次预测的时间过长也会影响稳定平台的稳定精度,经过实验验证当前模型阶数和样本数N已经能够满足需求,所以不再寻找其它极小值点。
3.2 正弦干扰实验
若使运动模拟平台做正弦运动,稳定平台就会受到相应的正弦姿态干扰,其干扰曲线如图4所示。
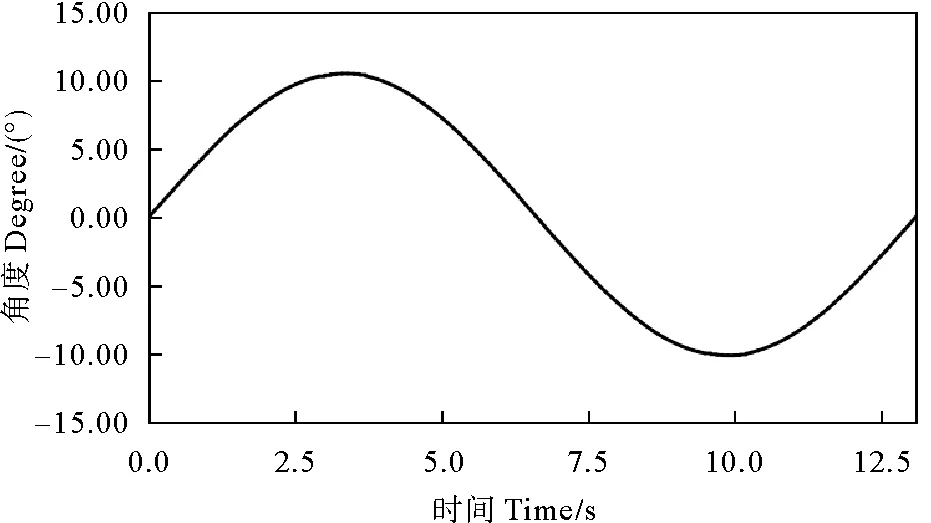
图4 正弦干扰曲线
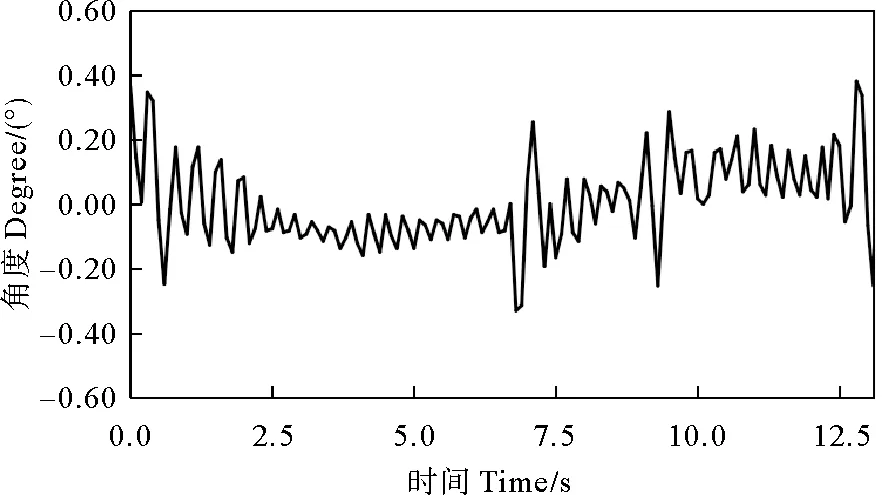
当没有ARMA模型参与时,尝试将PID参数调整至最优得到图5所示的稳定误差曲线,此时的Kp=7.00,Ki=0.90,Kd=2.50。可以看出最大稳定误差在正负0.3左右且存在振荡现象,说明此时PID控制器有一定消除误差的能力,但是稳定平台仍然不够平稳,这是由于PID控制器闭环调节的本质所决定的,即总是在误差出现之后做出反应,通过调整PID参数已经很难优化系统。
(Kp= 7.00,Ki= 0.90,Kd= 2.50)
当ARMA参与PID控制器的调节过程时,取历史数据序列的大小为120,阶数p= 4,q= 2,利用ARMA模型对姿态干扰进行预测,得到图6所示的预测误差曲线,可以看出最大绝对值小于0.04°,若以陀螺仪的静态稳定度0.05°作为参考,说明预测误差已经很小,是完全可以接受的。尝试调整PID的参数至最优得到如图7所示的稳定误差曲线,此时Kp= 3.79,Ki=0.01,Kd= 0.24,可以看出稳定误差大幅度减小,表明该PID控制器能够很好地消除系统时滞,稳定平台的稳定精度也得到提升。此时去掉ARMA模型的预测过程而不改变PID控制器的参数, 如图8所示稳定误差大幅度增加且呈现姿态干扰曲线的导数趋势变化,说明PID调节过程刚好延后了一个时刻,可见ARMA模型的作用十分明显。
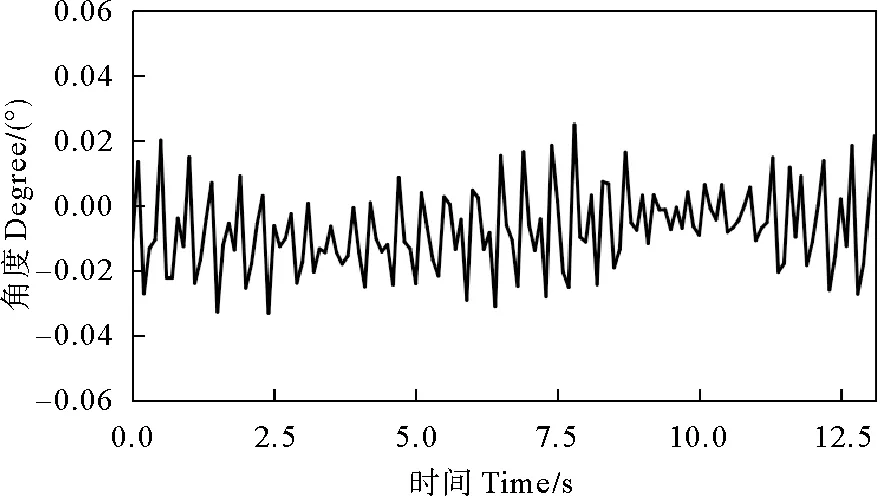
图6 正弦干扰时ARMA模型预测误差曲线
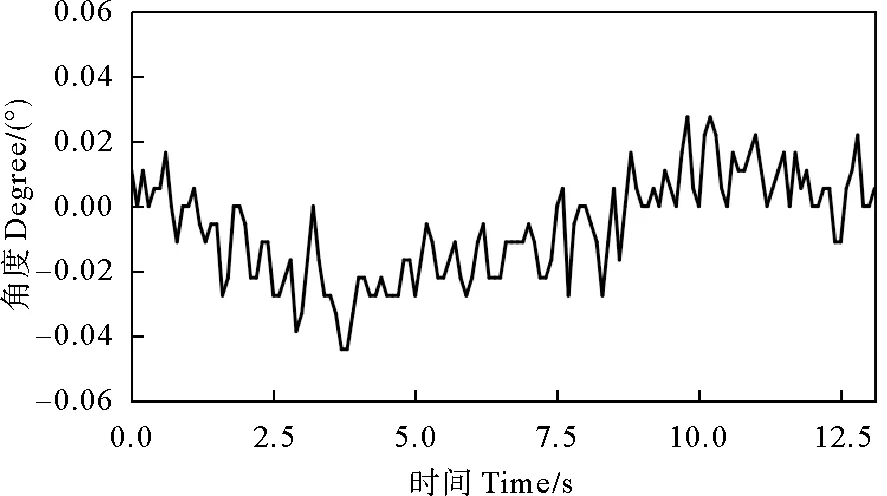
(Kp = 3.79,Ki = 0.01,Kd = 0.24)

(Kp = 3.79,Ki = 0.01,Kd = 0.24)
3.3 船摇运动干扰实验
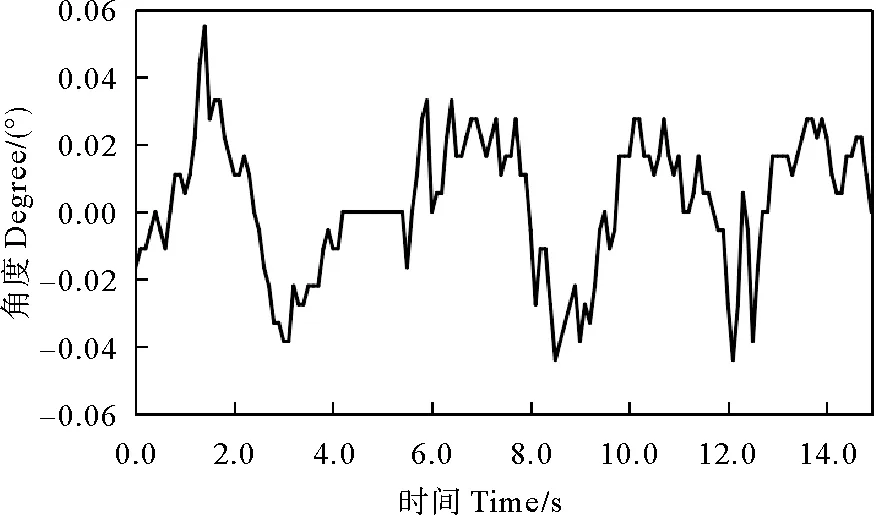
将姿态干扰换成如图9所示的模拟船摇运动,其它条件与正弦实验相同。使ARMA模型不参与PID控制,并认为正弦实验中调整好的Kp= 7.00,Ki= 0.90,Kd= 2.50为当前系统的最优参数,稳定平台的稳定误差曲线如图10所示。
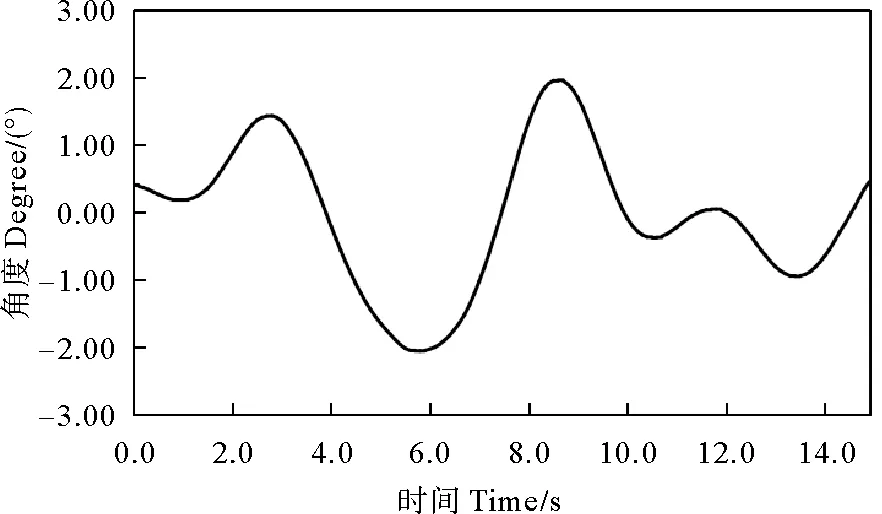
图9 船摇运动干扰曲线

(Kp = 7.00,Ki = 0.90,Kd = 2.50)
当ARMA模型参与时,且PID参数Kp= 3.79,Ki= 0.01,Kd=0.24,姿态干扰的预测误差曲线如图11所示,并得到图12所示的稳定误差曲线。可见预测误差在正负0.04°之间,仍然是可接受的,当有ARMA模型参与时,稳定误差较图10相比整体水平大幅减小,这表明当干扰为船摇运动且系统存在较大的时滞时,ARMA模型预测信息的加入仍然可以有效消除系统时滞,提高稳定平台的稳定精度。需要指出的是,一般来讲稳定平台的稳定能力都是有限的,而且当姿态干扰曲线变化较平缓时ARMA模型的预测才会较为准确,所以当运动干扰在可接受程度内,该控制算法才更有意义。
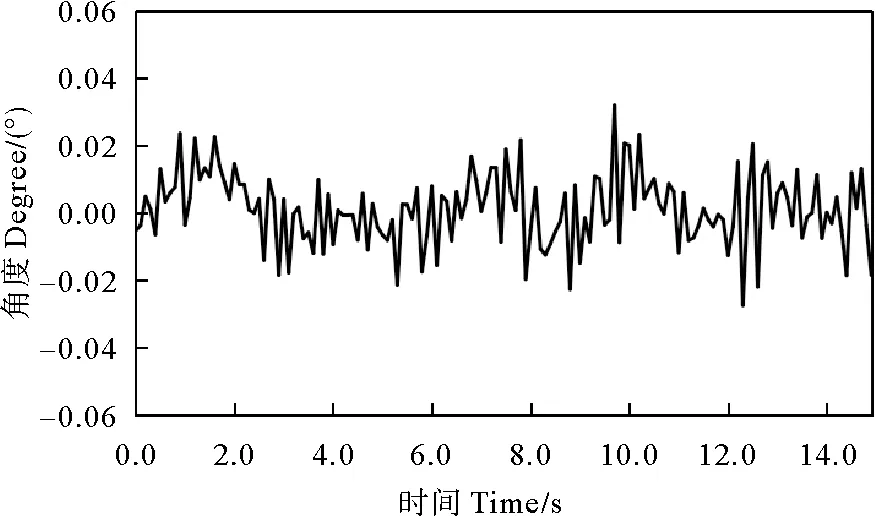
图11 船摇运动干扰时ARMA模型预测误差曲线
(Kp = 3.79,Ki = 0.01,Kd = 0.24)
4 结论
传统稳定平台存在固有时滞问题,其PID控制器总是在误差产生之后才做出调节,特别是在陀螺仪姿态数据报告频率较低、实时性差的情况下滞后将尤为突出,严重影响稳定精度。根据船摇运动可预报的特点,对此提出将ARMA模型加入到PID控制器中,通过预测得到下一时刻将要产生的误差并施加到PID控制器中,实现了提前调节。通过分析实验结果,得出以下结论:
(1)使用最小二乘法估计ARMA模型的参数可以使船的姿态预报具有很高的准确度,而且计算量小,能够满足实时参数估计的需求,同时也说明利用预测值的均方误差最小的原则确定模型阶数和单次预测所使用样本数的方法是可靠的。
(2)当采用传统PID控制器时,系统时滞确实是制约稳定平台稳定精度提高的因素,无论姿态干扰是正弦运动还是船摇运动ARMA模型参与PID控制的作用都十分明显,它能够很好地消除系统时滞,大幅提高稳定平台的稳定精度。
猜你喜欢
湖南林业科技(2021年3期)2021-12-02 21:15:32
大学数学(2021年5期)2021-10-30 09:01:04
华东师范大学学报(自然科学版)(2021年3期)2021-06-03 09:30:10
数学物理学报(2020年5期)2020-11-26 06:06:48
计算机工程与应用(2015年19期)2015-04-16 08:51:36
四川师范大学学报(自然科学版)(2015年2期)2015-02-28 14:07:40
电讯技术(2014年1期)2014-09-28 12:25:26
应用数学与计算数学学报(2014年3期)2014-09-26 12:03:52
电气电子教学学报(2014年1期)2014-08-23 03:23:44
棉花科学(2014年4期)2014-04-29 00:44:03
