基于MPSO-SVM 的不确定条形区域故障诊断研究
2021-05-24 01:21:18李默臣王福忠
沈阳工程学院学报(自然科学版) 2021年2期
李默臣,姚 波,王福忠
(1.沈阳师范大学 数学与系统科学学院,辽宁 沈阳 110034;2.沈阳工程学院 基础教学部,辽宁 沈阳 110136)
容错控制概念自提出以来很快成为关注的焦点,并在航空、航天等技术领域得到广泛运用。根据容错控制的特点,将其分为被动容错与主动容错。被动容错[1-3]通过优先考虑执行器或传感器故障,一定程度上满足了系统的可靠性要求,但同时存在能耗高、保守性大等问题;主动容错通过故障预警,提前判断故障通道的位置,很好地解决了这类问题。支持向量机[4-6](SVM)作为机器学习算法被广泛应用于统计学习理论及故障诊断领域。文献[7]针对SVM 中核宽度系数及惩罚因子难以获取的问题,采用网格搜寻法在条形区域下实现极点的精准分类,并设计闭环极点观测器来弥补极点信息难以采集的缺陷。文献[8]针对电梯故障特征难以提取、识别率差等问题,将电梯故障诊断信号源与时域指标相结合,构造故障特征向量,并应用最小二乘支持向量机(LSSVM)实现故障特征的有效分类。文献[9]针对粒子群算法中惯性权值取值唯一的问题,以DGEN380发动机故障为例,以燃油流量为输入,以低压转子的转速为输出,提出了应用改进的粒子群算法对发动机故障进行系统辨识。文献[10]针对BP神经网络在人脸识别中具有收敛速度慢的缺点,提出了应用MPSO改善BP神经网络的分类效果,更合理地确定连接权值和阈值。文献[11]依据PSO 全局寻优的高效性和混沌算法局部搜索的随机性,给出混沌粒子群混合算法,通过几种函数的测试,证明该方法对数据分类是有效的。
本文主要研究在不确定条形区域下,执行器发生连续增益故障,可靠控制器的设计问题。为解决闭环极点难以获取的问题,设计全维状态观测器以实现极点的在线采集;同时,针对SVM 参数选取易受主观先验知识影响及PSO 算法易陷入局部极值的缺陷,提出了一种使惯性权值自适应调整策略更加完善的MPSO-SVM 算法。与网格搜寻法(Grid search-SVM)和粒子群算法(PSO)相比,该算法的分类准确率能够达到98.888 9%,证明了其有效性和可行性。
1 MPSO-SVM 理论核心
1.1 SVM理论
SVM 作为智能学习算法之一,在小样本分类及非线性问题上应用较多。其基本思想是以获得最优分类超平面为目标,以构造映射ς:R→H为主要方式,从而获得问题的最优解。现存在样本集为

在SVM 理论中,核参数对系统的识别能力影响较大,不同值会产生不同的泛化效果。同时,错分样本的惩罚程度由惩罚因子决定,其大小也关乎系统的分类精度。因此,优化参数对SVM 的分类效果至关重要。相比于网格搜寻法与遗传算法,粒子群优化算法具有调整参数少、收敛速度快等优点,更适合应用于极点配置与分类问题当中。
1.2 PSO理论及改进
PSO 算法可看成无质量且无体积的粒子在只有速度和位置的约束下,在解空间不断更新并寻求最优解的过程。其中,个体极值被称为每个粒子寻觅的最佳位置,群体极值被称为整个群体寻觅的最佳位置。PSO的基本思想如下:
式中,wmax为惯性权值上限;wmin为惯性权值下限;tmax为迭代次数上限;t为当前迭代次数。为解决w前期较大,影响初期PSO 算法局部搜索性的问题,应加速w的前期递减速度,避免引起早熟;减慢w后期的递减速度,确保局部寻优过程中逐渐收敛。其公式为
2 极点观测器的设计
针对闭环系统极点数据采集困难的问题,该设计依据系统状态估计极点的方式,即极点观测器。假设系统为

式中,x(t)为时变矩阵,x(t)∈Rn。在假设状态可测情况下,根据系统状态估算矩阵A,若初始时间为t1,采样间隔为Δt,预采集n个状态值,具体算法如下:

3 MPSO-SVM 理论模型
与传统网格搜索法相比,本文应用MPSO 算法优化SVM 中的核宽度系数g和惩罚系数c来实现极点分类。该方法具有运行时间短,分类效果显著等优势。具体过程如下:
步骤1:对故障通道的极点数据实时采集,形成样本数集。
步骤2:对PSO 算法中的参量进行初始化处理,修改惯性权重公式。在此期间划分测试集与训练集,并完成数据预处理工作。
步骤3:任取两个粒子,一个代表核宽度系数g,另一个代表惩罚系数c,存入模型。
步骤4:运行程序并根据第i个粒子的个体极值、群体极值及适应度值选择是否更新速度和位置。
步骤5:若适应度值较差,则返回步骤2;否则,迭代终止,输出结果。
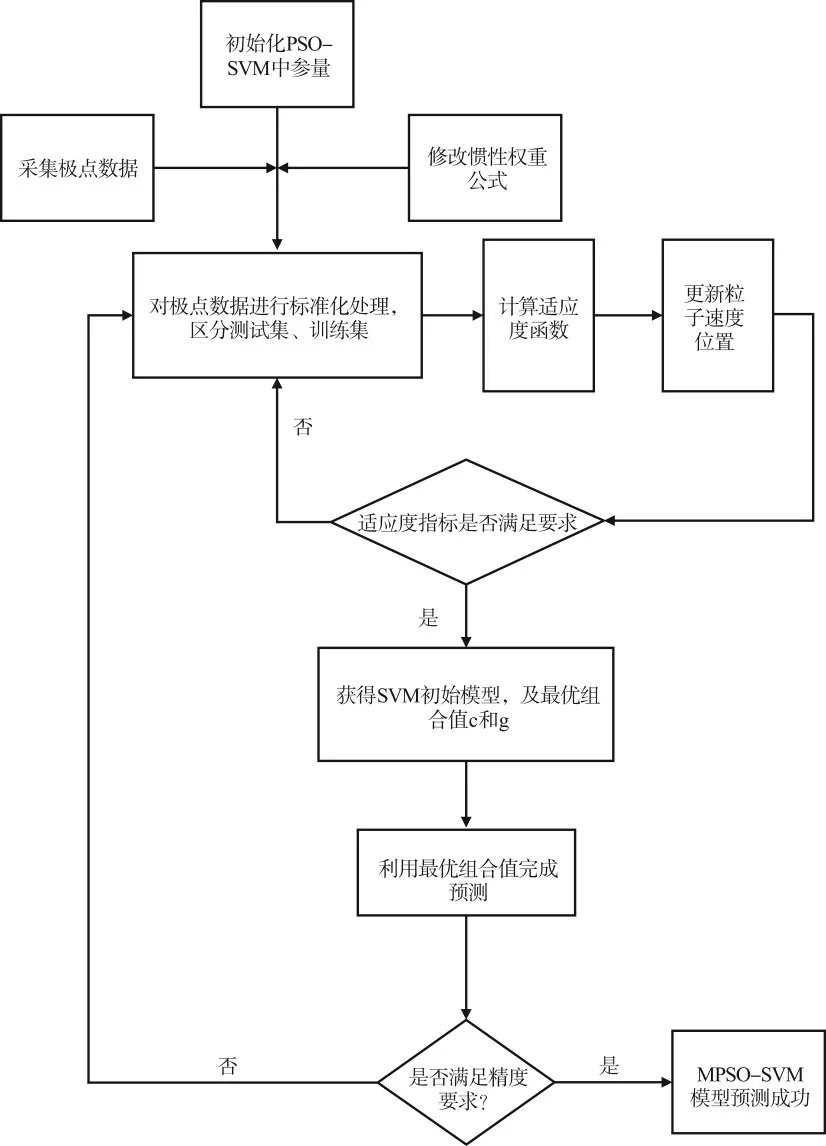
图1 MPSO-SVM 预测模型流程
4 改进粒子群算法在不确定条形区域的应用
4.1 问题描述
对于以下系统:

式中,ΔZ=DH(t)E,D和E为适维矩阵,且是定常的。H(t)为可测Lebegueke,且有HT(t)=H(t)≤I。而x(t)∈Rn、y(t)∈Rp和u(t)∈Rq分别为系统的状态变量、输出及控制变量,矩阵A、B和C满足不确定系统成立的充分必要条件。
引入静态输出控制器u(t)=Ky(t),此时闭环系统为

4.2 引理、定理
引理1若保证A的所有特征根均被约束在h1及h2的垂直条形区域内,当且仅当存在正定矩阵P,满足


引理2X和Y为常数矩阵,H为时变矩阵,且都满足相应维数要求,若HTH≤I成立,那么对任意常数ζ>0有XHY+YTHTXT≤ζXXT+ζ-1YTY。
1)Σ <0;
2)Σ11<0,Σ22-Σ21Σ11
-1Σ12<0;
3)Σ22<0,Σ11-Σ12Σ22
-1Σ21<0。
定理1对于上述系统(15),若保证极点均满足h1到h2的垂直条形区域约束要求,当且仅当存在常值ζ>0、β>0、对阵矩阵P和矩阵V、U、K,满足
式中,Φ=AP+PAT+BUC+CTUTBT,则有K =UV-1使得特征极点满足条形约束条件。
证明:根据引理1可有下列矩阵不等式成立:




在利用引理3,可得定理。
定理2 对于系统(16),当发生执行器故障uf(t)=F au(t)时,若保证极点均满足h1到h2的垂直条形区域约束要求,当且仅当存在常值ζ>0、β>0、对阵矩阵P和矩阵V、U、K,满足

式中,Γ=AP+PAT+BFaUC+(BFaUC)T,且Ki=UV-1(i=1,2,…,n)。
证明:从略。
5 仿真研究
考虑如下系统:

H为单位矩阵,若使闭环系统极点a+bi 稳定在h1=-4.5,h2=-1.5 的条形区域,则存在静态反馈控制器为

此时,极点均稳定在条形区域内。
5.1 不同算法可视化分析
若执行器发生连续增益故障Fa=diag(f1,f2),则极点跳出条形区域,此时系统不能正常运行。第一条通道故障情况如图2所示,f2=1,0.3 <f1<1.4;第二条通道故障情况如图3所示,f1=1,0.5 <f2<1.8。
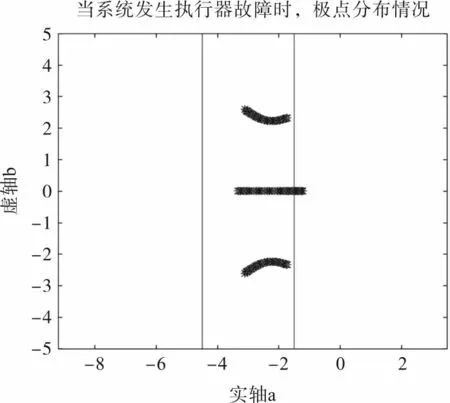
图2 第一条通道故障极点分布
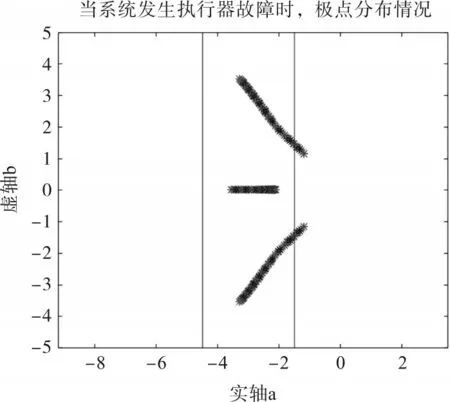
图3 第二条通道故障极点分布
分别采用Grid search-SVM 及PSO-SVM 对SVM 中的参数进行调整优化,如图4 和图5 所示。当c=512、g=64时,得出的最佳精准率为81.25%;当种群数量为30,学习率分别为c1=1.6 和c2=1.5时,最佳适应度曲线逐渐稳定,趋近于79.166 7%,此时的参数组合值为c=13.009 7、g=2.977 6。由此可判断,这两种算法并不能满足系统的分类要求,详细信息如表1所示。

表1 不同模型结果表
现采用MPSO-SVM 算法,效果如图6 所示。当c=58.854 7、g=12.238 7 时,时间消耗为5.156 3 s,分类准确率高达98.888 9%。
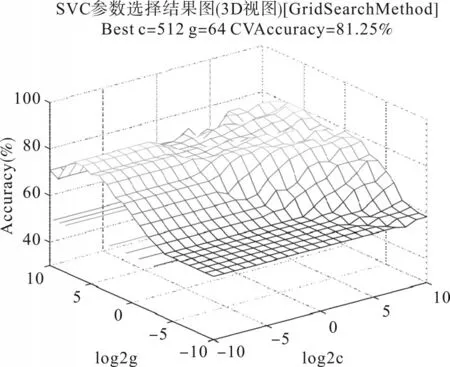
图4 Grid search-SVM 参数选择3D视图
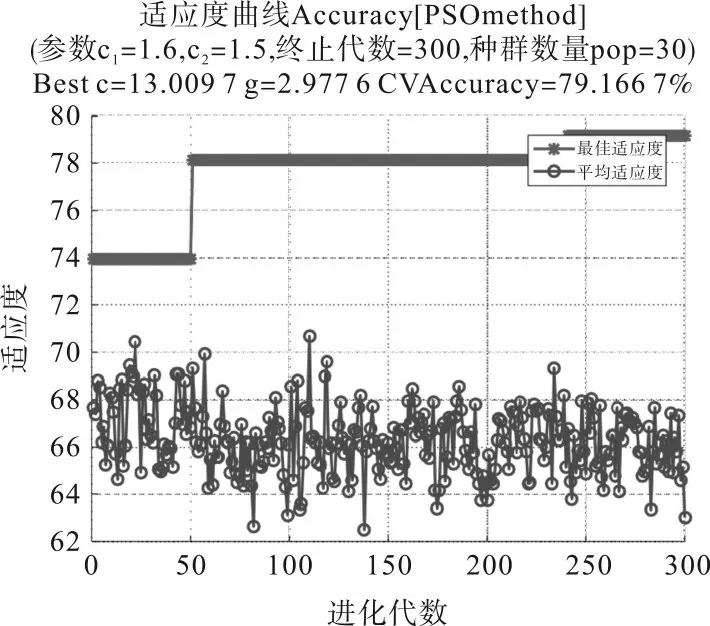
图5 PSO-SVM 适应度曲线

图6 MPSO-SVM 适应度曲线
通过以上3种算法对比可知,MPSO-SVM 算法在不确定条形区域极点配置问题中效果显著。
5.2 极点观测器测试
现对执行器发生故障情况进行模拟,以实现对闭环极点观测器有效性的验证。设系统第一条通道出现故障F=diag()f1,f2,即f1=0.34、f2=1。此时,有1 个极点跳出条形区域,极点集为λ={-3.068+2.569i,-3.068 -2.569i,-1.25},而根据极点观测器求得极点集 λ^={-3.128+2.439i,-3.114 -2.442i,-1.23},对 比 可得计算值无限逼近真实值。通过取时间间隔t1=0.1、t2=0.11、t3=0.12 和t4=0.13,并设初始值x(0)=[1,1,1]T,根据公式x(t)=eAtx(0)可得
x1=[0.111 8,0.764 3,0.960 2]T、x2=[0.044 0,0.743 2,0.950 0]T、x3=[-0.020 3,0.722 5,0.939 0]T、x4=[-0.0813,0.7023,0.9272]T、ΔX=[x2-x1,x3-x2,x4-x3]、X=[x1,x2,x3]Δt。
而X可逆,即可求公式(13)中的矩阵A。设系统发生故障时间t=0 s、Δt=0.01 s,误差公式为
式中,Re()为极点的实部;Im()为极点的虚部。计算可得Es=0.057 3,直接证明了极点观测器是可靠的。
5.3 MPSO-SVM 故障诊断器测试
依据MPSO-SVM 建立模型并完成可靠控制器的设计,能够得到系统期望的性能,当极点稳定在条形区域时,系统仍在原控制器下保持正常运行;若极点逃逸,立即调换设计好的控制器,保持系统稳定运行,如图7和图8所示。
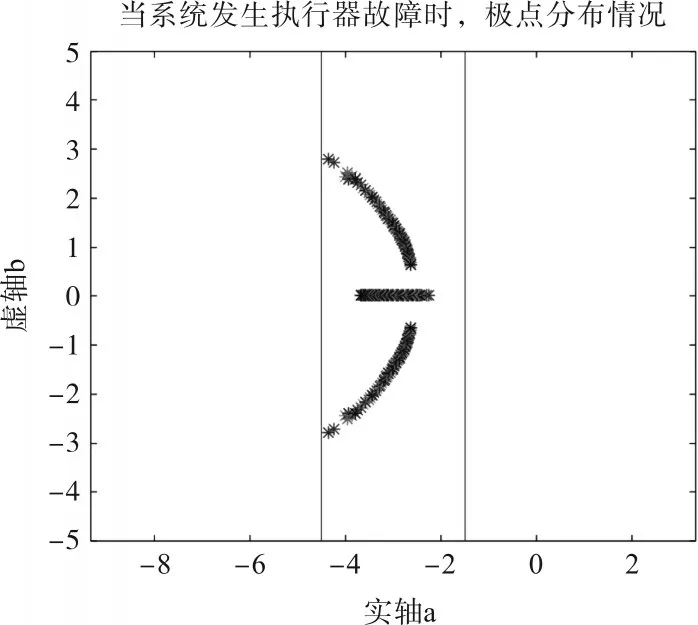
图7 针对第一条通道故障极点配置
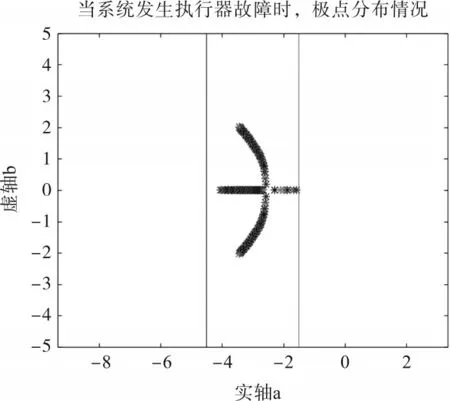
图8 针对第二条通道故障极点配置
6 结论
粒子群算法对区域极点配置效果明显,本文基于MPSO 算法的特点,通过完善惯性权重公式,有效地解决算法实现过程中全局搜索与局部搜索容易失衡的缺陷,将该方法用于SVM 参数寻优,准确率得到明显改善;针对极点信息难以获取的问题,设计了极点观测器,实现了闭环极点信息在线采集。同时,依据算例仿真,并结合多个算法进行对比,可得该方法设计的控制器鲁棒性能明显,在执行器出现故障,但极点仍处在条形区域时,系统不会做出响应;一旦极点逃逸条形区域,立即调换相应的可靠控制器保持系统正常运行。
猜你喜欢
小学生学习指导(中年级)(2021年5期)2021-05-18 08:07:56
活力(2019年19期)2020-01-06 07:35:54
黑龙江电力(2017年1期)2017-05-17 04:25:05
环境科技(2016年5期)2016-11-10 02:42:12
铁道科学与工程学报(2015年5期)2015-12-24 12:12:08
深空探测学报(2015年3期)2015-12-07 11:15:06
电测与仪表(2015年19期)2015-04-09 11:32:56
系统工程学报(2015年2期)2015-02-28 19:53:43
电网与清洁能源(2015年2期)2015-02-28 16:03:12
中国工程咨询(2015年6期)2015-02-16 05:33:48