
基于电子液压制动系统的防抱死冗余控制研究*
2021-05-24 05:45:28熊璐许竹君舒强冷搏于宜泽
汽车技术 2021年5期
熊璐 许竹君 舒强 冷搏 于宜泽
(1.同济大学,上海 201804;2.上海同驭汽车科技有限公司,上海 201806)
主题词:电子液压制动 防抱死冗余 滑移率控制
1 前言
集成式电子液压制动(Integrated Electronic Hydraulic Braking,I-EHB)系统是电子液压制动(Electronic Hydraulic Braking,EHB)系统的一种,它通过电机驱动主动建压装置为制动系统建压,实现制动踏板与主缸建压的解耦,从而快速、准确、稳定地响应控制算法计算出的期望主缸液压力。以此为基础,可以通过设计主缸液压力控制算法实现制动防抱死、车身稳定性控制等功能[1],满足汽车智能化的需求。由于I-EHB系统复杂度低、可靠性较高,目前越来越广泛地应用于乘用车,成为当前汽车制动系统发展的趋势之一。
利用I-EHB 实现制动防抱死功能主要需要解决主缸液压力控制和制动防抱死功能实现这2 个方面的问题。I-EHB 系统主缸液压力控制实际上是对电动机的控制,控制器输出为电动机的命令电流或命令力矩,常以主缸液压力为控制变量。常用的控制方法包括PID控制[2]、基于增益调度的PI 控制[3]、自适应鲁棒控制器[4]和滑模变结构控制器[5]等。利用I-EHB 实现制动防抱死功能,可借鉴传统ABS 的控制算法。逻辑门限值控制[6]是一种基于经验参数的控制方法,设计过程中需通过大量试验数据对控制器参数进行调试。基于滑移率控制的防抱死制动控制算法将车轮纵向滑移率作为控制对象,通过改变制动力使车轮实时纵向滑移率追踪其最优值,从而提升制动效能。目前基于最优滑移率控制原理的防抱死制动方法主要有PID 控制[7]、滑模变结构控制[8-9]、最优控制[10]、神经网络控制[11]等。
本文基于I-EHB 系统,针对传统ABS 功能失效的情况,设计基于主缸液压力控制的防抱死冗余控制算法。首先构建基于I-EHB 防抱死冗余系统架构,其次采用串级控制理论,分别设计内环主缸液压力控制算法与外环滑移率控制算法,最后通过台架和实车试验验证算法的有效性。
2 防抱死冗余系统架构
2.1 防抱死冗余功能定义
当常规ABS 失效时,液压控制单元(Hydraulic Control Unit,HCU)中阀系全开,相当于制动主缸与制动轮缸直接连通,此时制动系统中主缸与轮缸液压力相等。对主缸液压力的调节可以直接作用于四轮轮缸中,实现对车轮滑移率的控制,从而在制动过程中避免车轮抱死。
防抱死冗余系统工作步骤为:驾驶员踩下制动踏板后,I-EHB 系统中的位移传感器获取踏板开度,通过CAN 发送给防抱死冗余控制器,控制器根据踏板开度解析驾驶员制动意图。滑移率控制算法以最大限度利用地面附着能力和兼顾驾驶员制动意图为目标,计算参考主缸液压力。根据参考主缸液压力,控制器通过液压力控制算法计算得到电机转矩,并通过CAN 向I-EHB发送电机力矩指令以调节主缸液压力。
2.2 防抱死冗余系统控制策略设计
2.2.1 防抱死冗余系统整体结构
由防抱死冗余功能的需求分析,设计防抱死冗余系统控制策略,系统整体结构如图1所示。
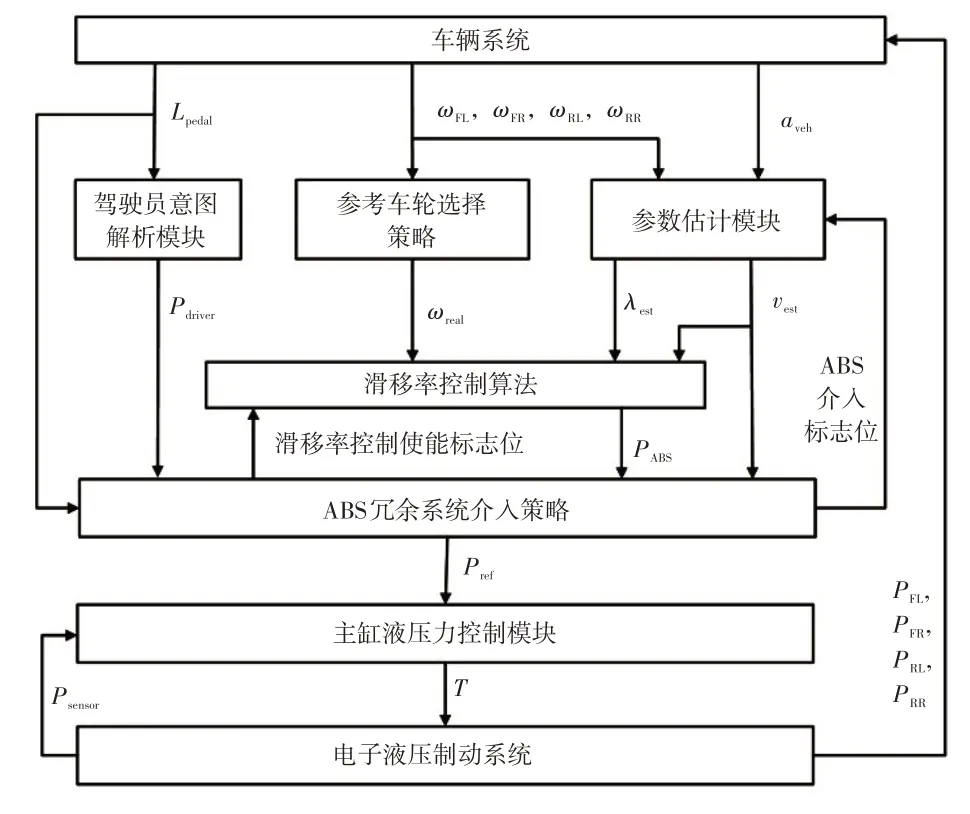
图1 防抱死冗余控制系统整体结构
车辆系统中,传感器获取车辆踏板开度信号Lpedal、四轮轮速信号ωFL、ωFR、ωRL、ωRR以及车身加速度信号aveh;驾驶员意图解析模块根据Lpedal得出驾驶员此刻期望的主缸液压力Pdriver;参考车轮选择策略对4个车轮的抱死程度进行分析,选出作为控制对象的车轮角速度ωreal;参数估计模块根据获取的车辆信息估计当前车速vest和路面附着系数λest;滑移率控制算法计算使车轮达到目标滑移率时的主缸液压力PABS;ABS 冗余系统介入策略兼顾驾驶员意图与防抱死需求决定是否介入;主缸液压力控制模块输出电机力矩T控制主缸液压力跟踪上层给出的目标液压力Pref;电子液压制动系统反馈当前主缸液压力Psensor给主缸液压力控制模块,并为轮缸建压,从而产生4个车轮的制动液压力PFL、PFR、PRL、PRR。
2.2.2 参考车轮选择策略
传统ABS 通过HCU 控制车轮滑移率,可以对多个车轮的制动力进行单独控制。但由于提出的防抱死冗余系统的执行器为I-EHB 中的电机,即只能对主缸液压力进行控制,4个轮缸液压力始终与主缸液压力保持一致,无法实现对轮缸液压力的单独调节,因此产生选择哪个车轮的滑移率作为控制对象的问题。
ABS冗余系统作为失效备份系统,应首先考虑车辆安全性,保证4 个车轮均不抱死,以提高车辆制动稳定性。因此本文使用“四轮低选”策略对参考车轮进行选择,选取4 个车轮中滑移率最大的车轮作为控制对象。由于无法对四轮轮缸单独控制,因而难以保证四轮均处于峰值附着系数对应的最佳滑移率,无法最大限度地利用地面附着能力。
2.2.3 算法介入退出策略
当制动踏板开度与车速均大于0时,滑移率跟踪算法开启,实时计算使当前被控车轮不打滑的主缸液压力PABS。当Pdriver<PABS时,防抱死冗余控制不介入。根据防抱死制动法规[12],车速小于15 km/h时允许车轮抱死,此时防抱死冗余算法退出。
2.3 车辆制动过程状态估计
2.3.1 车速估计
以轮速信号和车身减速度信号作为输入,参考最大轮速法和斜率法,利用基于运动学的车速估计方法,结合运动学公式利用积分运算进行车速估计。
当车辆平稳行驶时,轮速可以反映实际车速,选取最大轮速vwhl_max作为车速估计值:

式中,r为车轮半径。
ABS 冗余系统介入之后,由于车轮滑移率较大,轮速与实际车速相差也较大,轮速信号已经不可信,无法直接使用轮速信号判断车速,故以ABS冗余系统介入时的最大轮速作为初始速度,使用车身加速度信号进行积分得出估计车速:

2.3.2 路面识别
该模块判断当前行驶路面附着系数的高低,为滑移率控制器设置不同的最佳滑移率和控制参数,从而实现不同路面条件下防抱死制动功能。在高附情况下,取参考滑移率为0.2;低附情况下,取参考滑移率为0.1。本文参考博世开发的基于门限值控制策略的道路识别方法[13],根据车轮角减速度和车身减速度在高附路面上较大而在低附路面上较小的特点,作为路面识别的依据,如图2所示。
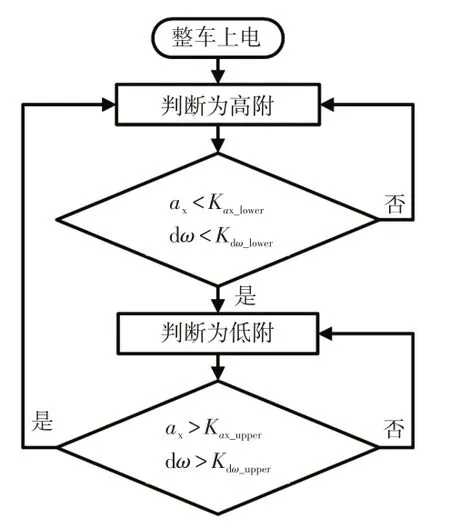
图2 路面识别算法
图2 中,ax为车身减速度,dω为4 个车轮角减速度中的最小值,Kax_upper和Kax_lower分别为车身减速度上、下阈值,Kdω_upper和Kdω_lower分别为车轮角减速度上、下阈值。dω可使用多点轮速信号以及数值微分方法进行估算[14]:

式中,n为用于计算车轮角加速度的信号数量,根据轮速信号质量,可选择3~6;t为按时间顺序排列的信号值序号。
3 防抱死冗余控制算法
防抱死冗余控制算法结构如图3所示,通过采用串级控制理论实现车轮滑移率的控制,内环负责调节IEHB主缸液压力,外环以参考滑移率为目标,使实际滑移率跟踪目标滑移率。为实现防抱死冗余控制,分别设计主缸液压力控制算法和滑移率跟踪控制算法。
3.1 主缸液压力控制算法
3.1.1 I-EHB系统特性研究
I-EHB系统包含电机、减速机构、制动主缸、制动液等,是一种非线性系统。简化的系统数学模型为:

式中,m为机械部分等效质量;x为主缸制动腔活塞的轴向位移;c为机械部分等效阻尼;kM为机械部分等效刚度;i为机械部分传动比;R为机械部分小齿轮半径;为机械与液压部分的摩擦力总和;p为主缸液压力;A为活塞的等效面积。
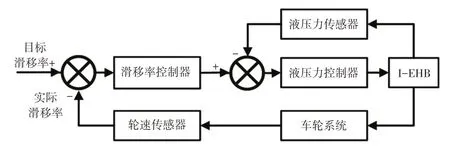
图3 防抱死冗余控制算法架构
为进一步研究系统特性,搭建了I-EHB 系统试验台架,其结构如图4 所示。台架部件关键参数如表1所示。

图4 I-EHB系统试验台架
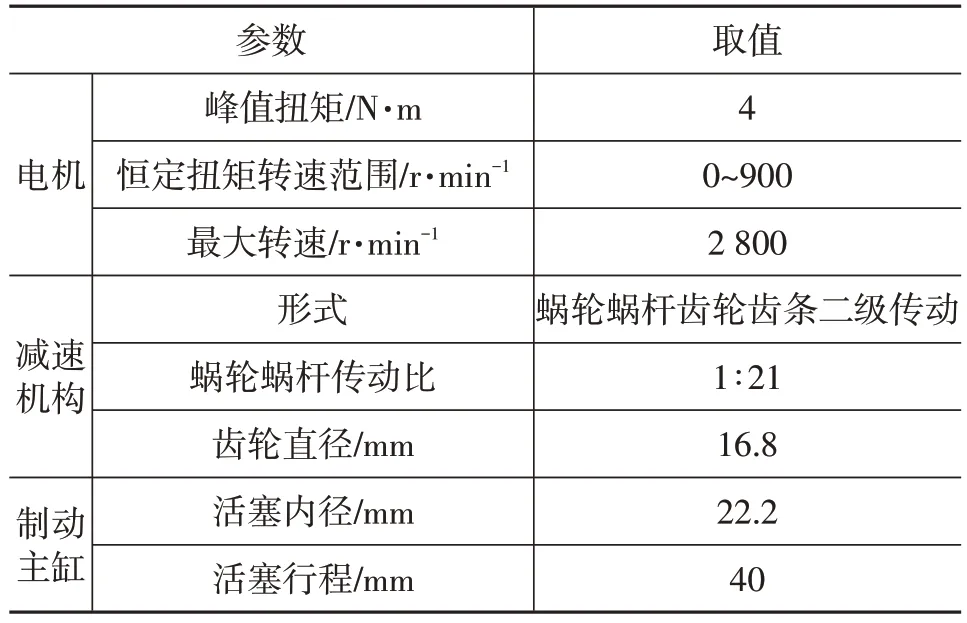
表1 I-EHB系统试验台架关键参数
通过I-EHB 系统台架试验,得到I-EHB 系统在阶梯电机力矩输入下的液压力响应,如图5所示。阶跃力矩输入分别为0.3 N·m、0.9 N·m、1.5 N·m、2.1 N·m,可以看出电机力矩与主缸液压力间呈现出较强的非线性关系。因此,采用抗积分饱和滑模控制方法对I-EHB系统驱动电机进行控制,跟踪主缸液压力参考值。
3.1.2 主缸液压力跟踪控制律设计
主缸液压力跟踪误差定义为:

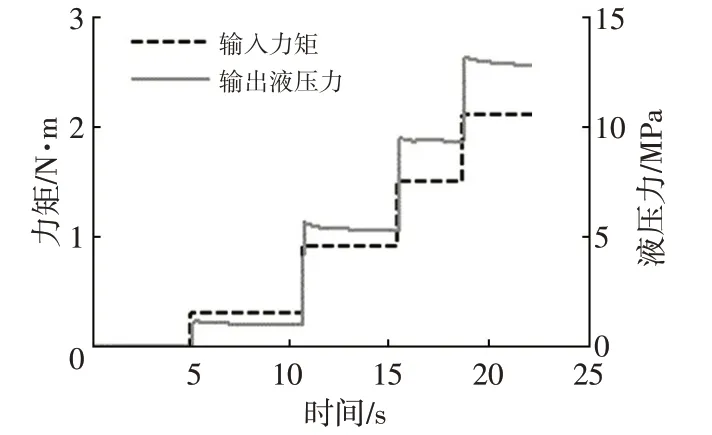
图5 I-EHB系统阶梯力矩输入响应曲线
在防抱死制动过程中,主缸的建压速度至关重要。为了提高响应速度,令施加的电机力矩表示为:

式中,kpMC为正比例系数,取值越大,趋近滑模面的速度越快,取为电机最大力矩4 N·m。
为减弱滑模控制器的抖振问题,采用饱和函数替代符号函数:
得到连续滑模控制律:

式中,θMC>0为饱和函数边界层厚度。
采用饱和函数可以改善系统抖振问题,但同时会带来跟踪误差,采用滑模积分控制可以改善边界层内响应以减小误差。为避免积分饱和,增加抗积分饱和后的滑模控制器为:

式中,kiMC>0为积分增益系数;sMC为误差变量;σMC为中间变量。
当控制误差|sMC|≥θMC时,电机力矩T=-kpMC·sgn(sMC),系统状态可以迅速逼近滑模面,误差快速减小;当控制误差|sMC|<θMC时,有:

可见,此时输出的电机转矩为以跟踪误差比例项和积分项为参数的函数。
3.2 滑移率控制算法
3.2.1 制动过程分析
根据单轮模型的受力分析,车轮制动过程中的动力学方程为:
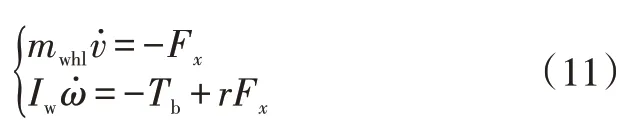
式中,mwhl为1/4整车质量;IW为车轮转动惯量;Fx为地面施加给轮胎的制动反力;v为车速;ω为轮速;Tb为制动器摩擦力矩。
车轮未抱死时,制动器的摩擦力矩可以表示为制动缸的液压力函数:

式中,pwhl为制动轮缸液压力;Kef为与制动器结构、摩擦因数有关的量。
当制动踏板开度过大,导致车轮在Tb的作用下使得制动器制动力超过地面附着力限制时,车轮将出现抱死现象。通常使用轮胎纵向滑移率λ来表示车轮的滑动情况:

路面附着系数随滑移率的变化关系如图6所示,其中μx为纵向附着系数,μy为横向附着系数。
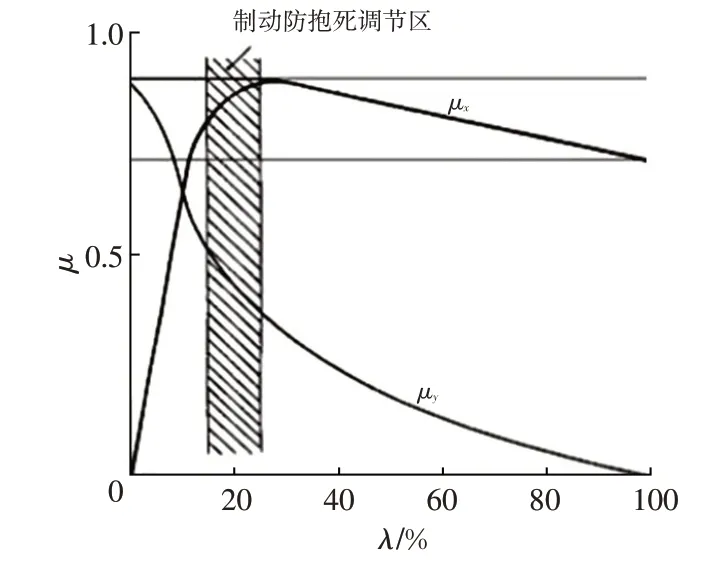
图6 附着系数-滑移率特征曲线
由图6可见:当滑移率超过峰值附着系数对应的最佳滑移率区间时,制动力随着滑移率的增大而减小,制动效能降低;同时,由于轮胎的纵侧耦合特性,滑移率大时轮胎侧向力极限值也会减小,削弱制动稳定性。防抱死控制器的作用就是把车轮滑移率控制在最佳滑移率附近,综合提高制动性能。
3.2.2 滑移率跟踪控制律
由于附着系数与滑移率之间呈非线性关系,选用抗积分饱和滑模控制算法进行滑移率控制。考虑车速接近于0 时式(13)计算溢出,将式(13)改写,以车轮角速度为控制量控制车轮滑移率:

将参考滑移率λref代入式(14)可得参考车轮角速度:

选取滑模变结构切换函数为车轮角速度误差:

设计车轮最优滑移率滑模控制的控制律为:

由式(12),Tb正比于轮缸液压力,根据前述分析,此时轮缸液压力等于主缸液压力,因此将控制律改写为:

式中,kp为正比例系数,一般设计为在允许的控制范围内的最大值,故取值为主缸最大液压力10 MPa。
将符号函数改写为饱和函数,得:

式中,θp为饱和函数边界层厚度,为常数。
未避免积分项饱和,同时减小跟踪误差,引入误差变量s,将滑移率控制律设计为:
式中,σ为中间变量,ki为控制误差的积分增益系数,为正常数。
当控制误差|s|<θp时,有:

4 防抱死冗余控制试验
4.1 硬件在环试验
基于图4所示的I-EHB系统试验台架,搭载防抱死冗余控制系统,并根据试验车辆参数利用CarSimRT 进行动力学建模,车辆参数如表2 所示。利用NI PXI 的LabVIEW RT 系统进行传感器参数采集,搭建了硬件在环试验平台。其组成结构和工作原理如图7所示。

表2 试验车辆整车参数
路面设置为:低附路面附着系数为0.2,高附路面附着系数为0.8;对接路面为前段附着系数0.8,后段附着系数0.2;对开路面为左侧附着系数0.8,右侧附着系数0.2。车速为60 km/h,驾驶员输入阶跃18 MPa的期望液压力。

图7 硬件在环试验平台工作原理
4.1.1 高附路面控制效果
如图8 所示,在高附路面上,路面识别模块在算法刚介入时判断为低附,这是由于驾驶员输入为阶跃信号,车辆刚开始减速ABS 即介入,减速度要经历由0 降低的过程,先经过低附路面的门限值,短暂时间后判断正确。从轮速情况来看,初始时刻出现较大滑移率之后算法能控制车轮滑移率在目标滑移率附近,达到防抱死的要求,平均制动减速度为6.05 m/s2,附着系数利用率为77.2%。
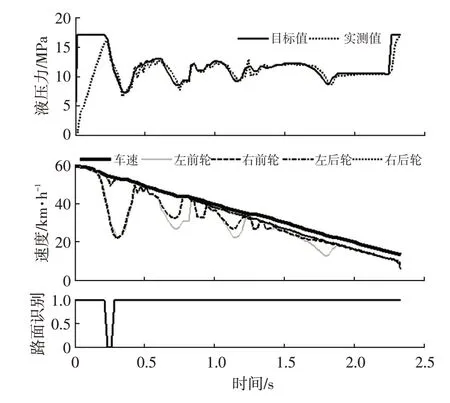
图8 台架试验高附路面制动情况
4.1.2 低附路面控制效果
如图9 所示,在低附路面上,ABS 冗余也可以有效防止车轮抱死。前0.5 s液压力波动导致轮速与车身速度波动,0.5 s后车轮滑移率在目标值附近抖动,路面识别模块正确判断路面,平均制动减速度为1.33 m/s2,附着系数利用率为67.9%。
4.1.3 对接路面控制效果
如图10所示,当路面从高附切换到低附时,路面识别模块对路面的判断有0.4 s 的延迟,这是由于路面切换时前、后轮处于不同附着条件路面,车身加速度抖动,带来路面识别的短暂延迟。两前轮会在刚进入低附的前0.3 s 抱死,这是由于液压系统的迟滞产生的。进入低附路面0.3 s之后,滑移率被控制在稳定的范围内,达到防抱死控制目的。

图9 台架试验低附路面制动情况

图10 台架试验对接路面制动情况
4.1.4 对开路面控制效果
如图11所示,在对开路面上,低选策略以右前轮作为参考车轮,滑移率在目标值附近波动,达到防抱死控制目标。
试验结果表明,基于I-EHB主缸液压力控制的ABS冗余算法能够较好地实现车辆防抱死,在常规ABS失效时保证车辆制动过程的稳定性。
4.2 实车试验
为验证基于I-EHB 主缸液压力控制的防抱死冗余系统的实际效果,分别在高附和低附路面上对车辆进行制动试验。试验车辆和场景如图12 所示,该试验平台由江铃E400 型电动车改装而成,将其传统的真空助力制动系统替换为电子液压制动系统,I-EHB系统参数见表1。试验车辆整车参数见表2,车辆制动器参数如表3所示。

图11 台架试验对开路面制动情况

图12 实车试验场景
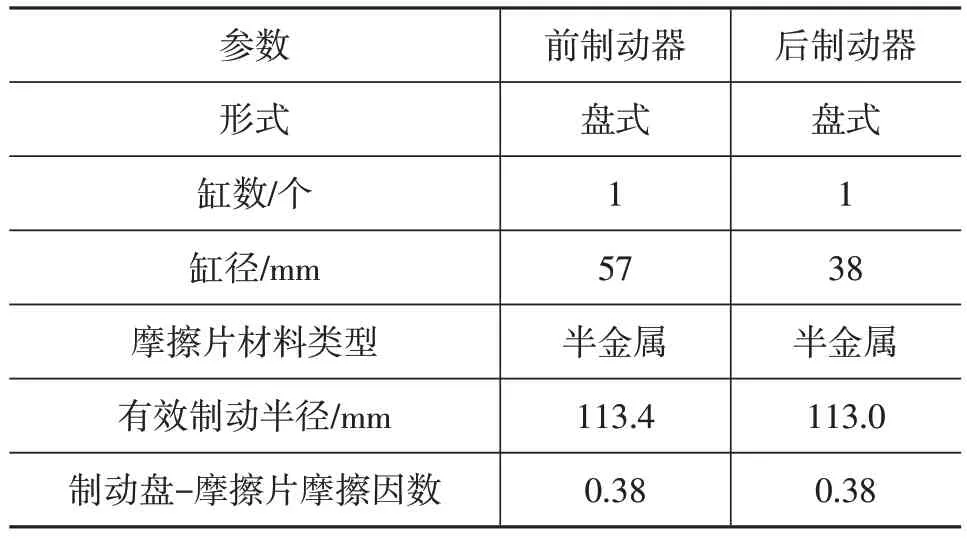
表3 试验车辆制动器参数
试验工况为:将原车ABS 控制器电源断开使其失效,驾驶员尽可能操作转向盘使车辆保持直行,车辆加速至60 km/h 左右时,驾驶员猛踩制动踏板并尽量保持在踏板最大开度处,观察车辆制动过程。
4.2.1 高附路面实车试验
由图13a 可以看出,由于I-EHB 系统的迟滞,实际液压力对期望液压力的跟踪有0.05 s 左右的延迟。由图13b看出,基于主缸液压力控制的防抱死冗余控制系统可以有效防止车轮抱死,且图13c所示的滑移率在最佳滑移率(0.2)附近波动。2.5 s 之后,车速低于防抱死法规中规定的车速15 km/h,允许车轮抱死,算法退出。在ABS 冗余介入过程中,平均制动减速度为6.26 m/s2,附着系数利用率为75.15%,可以达到防抱死法规中对常规ABS附着系数利用率大于75%的规定[12]。
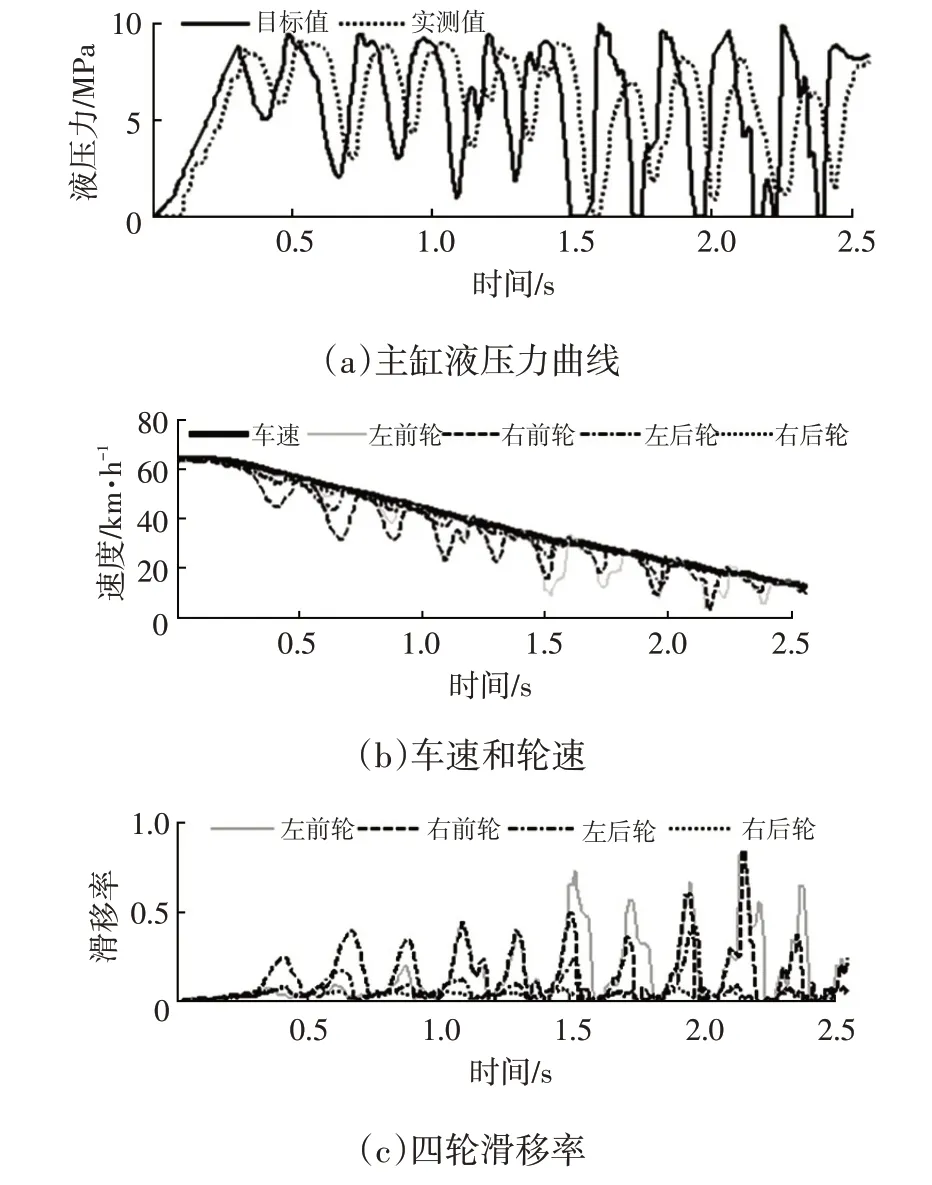
图13 实车试验高附路面制动情况
4.2.2 低附路面实车试验
由图14 可以看出,在防抱死冗余系统的控制下,4个车轮皆不会抱死,且在四轮低选策略下,每一时刻四轮滑移率中的最大值均保持在最佳滑移率附近。在制动时间为4.4 s 时,车速低于15 km/h,允许车轮抱死,算法退出。ABS冗余算法介入过程中,平均制动减速度为2.86 m/s2,附着系数利用率为83.42%,同样满足制动法规相关规定。
以上试验结果表明,针对I-EHB 系统开发的防抱死制动冗余算法能够很好地实现制动过程中车辆防抱死,且对路面有自适应性。
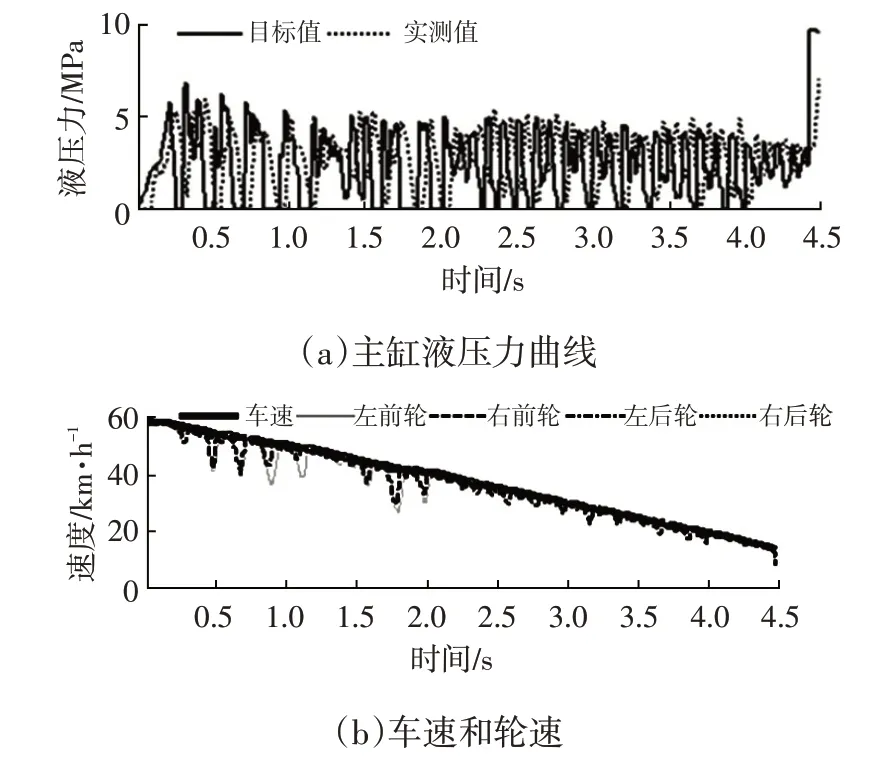
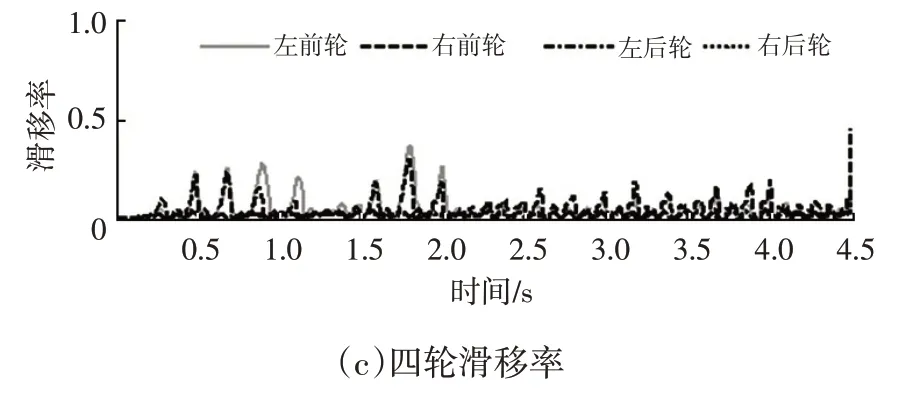
图14 实车试验低附路面制动情况
4.2.3 与原ABS的试验对比
为进一步验证本文所设计的防抱死冗余系统的效果,将其与原车搭载的ABS进行对比,保持原车ABS功能,在前文所述高、低附路面上重新进行制动防抱死试验,结果如表4和表5所示。可以看出,基于主缸液压力控制的防抱死冗余控制系统能够部分实现原车ABS 防抱死制动的功能:高附路面下受限于四轮低选策略的影响,路面附着系数利用率略低于原车ABS;低附路面下制动效果与原车ABS基本持平。试验结果表明,作为冗余备份系统,本文所设计的基于I-EHB 系统主缸液压力控制的防抱死制动系统可以满足功能要求。

表4 高附路面下原车ABS与防抱死冗余系统对比
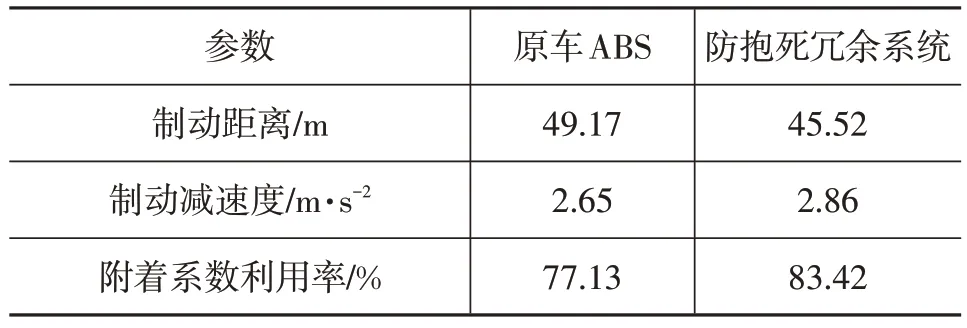
表5 低附路面下原车ABS与防抱死冗余系统对比
5 结束语
本文提出一种在常规ABS 失效条件下,利用IEHB系统主动调节主缸液压力以实现车轮防抱死的控制算法。通过硬件在环试验和实车试验,验证了该算法的有效性,其能够大幅提升车辆的制动稳定性和安全性,且无需额外硬件。以本文所设计的防抱死冗余控制系统为基础,进一步研究的方向包括:提升控制系统对路面条件的自适应性,结合更完善成熟的路面识别算法以最大限度利用路面附着条件;深入考虑液压力响应的非线性以及摩擦片温升等因素的影响,提升滑移率控制的精度。
猜你喜欢
汽车安全与节能学报(2022年2期)2022-07-17 07:42:50
汽车实用技术(2022年10期)2022-06-09 11:33:44
汽车实用技术(2020年24期)2021-01-05 08:22:04
汽车维护与修理(2018年1期)2018-04-04 01:13:22
制造技术与机床(2017年6期)2018-01-19 02:41:07
电源技术(2015年9期)2015-06-05 09:36:06
汽车维护与修理(2015年5期)2015-02-28 12:16:34
警察技术(2015年6期)2015-02-27 15:38:33
汽车技术(2014年1期)2014-07-12 16:41:32
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
