网联自动驾驶环境下改进的加权MOBIL自主性换道决策模型
2021-05-20 01:22:48潘义勇
重庆交通大学学报(自然科学版) 2021年5期
潘义勇,王 松
(南京林业大学 汽车与交通工程学院,江苏 南京210037)
0 引 言
随着传感技术、通信技术以及人工智能的飞速发展,网联自动驾驶车将成为未来交通发展的热点和趋势。换道行为需要对两条甚至多条道路上的交通流状态进行判断,并且控制着车辆纵向和横向两个方向的运动状态。频繁的换道极易引起交通流紊乱和行车延误,激进的换道行为对驾驶安全有着重大的影响。为了提高高速公路运行效率,减少交通拥堵和交通事故的发生,研究网联自动驾驶环境下高速公路换道模型有着至关重要的意义。
网联自动驾驶车辆换道模型需要考虑目标车辆前后多车辆的情形。A.KESTING等[1]提出一种基于激励准则和安全准则的换道模型MOBIL(minimizing overall braking induced by lane changes),该模型以加速度作为效用函数,整体制动最小化为换道准则;J.I.GE等[2]提出基于加速度的巡航连接控制理论,该理论通过车车通信技术获取来自前方多辆车的加速度信息;J.MONTEIL等[3]提出多预期合作规则,引入全速度差模型并与MOBIL换道模型相结合;V.TURRI等[4]为了安全、高效地协调排班中车辆,基于道路地形的信息预览和车辆的实时控制,提出了一种重型车辆排班的两层控制体系结构;秦严严等[5]基于自动驾驶车辆与人工驾驶车辆混行的交通情况下,提出了自动驾驶与人工驾驶车辆不同比例下的混合交通流元胞传输模型;常浩[6]在车路协同的环境下研究车辆换道,考虑了周围多辆车的行驶状态对车辆换道的影响,根据模型预测出来的换道加速度作为驾驶建议对驾驶员进行辅助驾驶;聂建强等[7]建立了网联自动驾驶环境下改进MOBIL模型,考虑了车辆换道后对原车道后随车的积极影响以及对目标车道后随车的消极影响,选取有最大积极影响车的效益和最小消极影响车的效益之和为总效益值;丁婉婷[8]在网联自动驾驶环境下改进MOBIL模型基础上,考虑了目标车的通信范围内换道对原车道和目标车道上所有后随车的影响;聂建强[9]在网联自动驾驶换道决策过程中,提出了基于MOBIL改进的单车期望换道决策模型,该模型考虑了车辆换道后对多辆后随车的影响,但是其假设对多辆后随车的影响是均匀的,其设置权重因子是常数,这不符合实际交通流情形,因其并未考虑车辆换道后对原车道和目标车道上后随车影响的不均匀性。
针对以上问题,笔者在网联自动驾驶环境下MOBIL自主性换道决策模型基础上,考虑车辆换道后对原车道和目标车道上多辆后随车的影响不均匀性,通过通信范围内的所有后随车与目标车之间的相对运动状态关系,构建影响权重因子的表达式,建立改进的加权MOBIL自主性换道决策模型,减少交通拥堵,提高交通流的运行效率,更有效地仿真实际交通流情形下换道行为。
首先介绍网联自动驾驶车辆换道模型的前提假设和换道的场景设定以及传统的MOBIL换道模型和适用于网联自动驾驶的MOBIL换道决策模型;其次,介绍了改进的加权MOBIL换道决策模型的权重因子设置;再次,进行MATLAB数值仿真实验,通过定性定量分析并与传统MOBIL换道决策模型进行比较;最后,进行了总结。
1 自主性换道决策模型
1.1 换道模型的前提假设与场景设定
网联自动驾驶车辆各个方面技术并没有完全成熟,为了便于研究提出以下4点假设:①不考虑通信延误,即在通信范围内,车辆之间能够实时发送和接受信息;②不考虑信息测量误差和信息传送误差,认为车辆信息获取和传送均准确;③不考虑车辆的横向速度、横向加速度;④由于DSRC通信范围为300 m,网联自动驾驶车辆的通信范围设为300 m。
图1是网联自动驾驶汽车简化示意。图1中:车辆V为目标车辆,所在车道为原车道;Vi为目标车的第i辆前导车;FVi为目标车第i辆后随车;目标车V需要换道的车道为目标车道;换道间隙为目标间隙;TVi为目标车道上第i辆前导车;TFVi为目标车道上第i辆后随车。

图1 高速公路网联自动驾驶汽车示意
1.2 MOBIL模型
基于激励和安全标准的MOBIL换道决策模型[1]激励标准依据车辆换道带来的加速度增加或者减速度的减少,其安全标准采用换道引起的后随车辆的减速不超过规定的阈值,防止碰撞的发生。
网联自动驾驶环境下的MOBIL换道决策模型激励准则根据通信范围内车辆的整体效益来衡量车道的吸引力,其安全准则考虑了所有上游车辆的减速度不超过规定的阈值。MOBIL换道决策模型可以很好的结合跟驰模型使用,将换道的需求产生和可行性判断整合,既适用于人工驾驶车辆也适用于智能驾驶车辆。
适用于网联自动驾驶的MOBIL换道模型结合自动化与网联化的特征优势,在车辆通信范围内,考虑了车辆换道后对原车道和目标车道上的多辆后随车的影响。现有研究中通过目标车道和原车道上的多辆后随车的加速度变化反映影响,没有考虑车辆换道后对原车道和目标车道上多辆后随车的影响不均匀性,这不符合实际交通流情形。车辆换道后对于原车道和目标车道上的后随车影响程度不同,如果后随车辆与目标车辆车距较近或者相对速度差大,换道行为对该辆后随车的影响程度比其他后随车的影响程度大。笔者提出的改进的加权MOBIL自主性换道决策模型通过整合目标车辆和后随车之间的相对位置和相对速度,赋予后随车不同权重来反映换道行为对整体交通流的影响。
2 改进加权MOBIL换道决策模型
2.1 传统的MOBIL换道决策模型
A.KESTING等[1]提出的MOBIL换道模型是一种车辆跟驰的换道模型,其考虑车道变换后车辆加速度(或减速度)的差异作为函数的效益值,并对目标车道上的新跟随者施加制动减速度,以避免事故发生。因此该模型包含安全准则模型和激励准则模型两个部分,并与M.TREIBER[10]等提出的IDM跟驰模型相结合。
2.1.1 安全准则模型
安全准则模型如式(1):
(1)

2.1.2 激励准则模型
激励准则模型如式(2):
(2)
2.1.3 IDM跟驰模型
IDM跟驰模型如式(3)~式(6):
(3)
(4)
SV=‖xV-1-xV‖-lV
(5)
ΔvV=vV-vV-1
(6)
式中:aV为目标车辆V的加速度;vV为目标车辆V的速度;SV为目标车辆V的实际跟车距离;ΔvV为目标车辆V与其前导车的速度差;amax为车辆的最大加速度;δ为加速度指数;v0为目标车辆的期望速度;S0为静止安全距离;T为安全车头时距,s;b为车辆的舒适减速度,m/s2;xV为目标车辆V的纵向位置;xV-1为前导车V-1的纵向位置;lV为车辆的车长;vV-1为前导车V-1的速度。
2.2 适用于网联驾驶的MOBIL换道决策模型
改进的MOBIL模型[8]是在传统的MOBIL模型基础上,考虑了在智能网联汽车的环境下,从整体的角度考虑目标车换道后所引起的目标车辆以及在通信范围内所有后随车的影响。该模型由安全准则模型、激励准则模型两部分构成,并结合了M.GUÉRIAU等[11]提出的改进IDM跟驰模型。
2.2.1 安全准则模型
网联自动驾驶改进的安全准则模型如式(7):
(7)

2.2.2 激励准则模型
网联自动驾驶激励准则模型如式(8):
(8)

2.2.3 改进的IDM跟驰模型
车辆在跟驰过程中速度受到前导车的影响较大,考虑了三辆前导车对目标车的不同影响权重。由于前导车对目标车的影响程度受到相对速度差与车间距的限制,结合IDM跟驰模型,改进的IDM跟驰模型如式(9)~式(11):
(9)
mj=ρjTj
(10)
(11)
式中:ρj为车辆V-j与其前导车的运动相近程度;Tj为车辆V-j与其前导车的信息可靠度;SV-j为车辆V前第j辆车与车辆V前第j+1辆车的车间距;ΔvV-j为车辆V前第j辆车与车辆V前第j+1辆车的速度差。
2.3 权重因子的设置
由于目标车辆换道后会引起交通流的扰动,而扰动具有向后传播的特性,当目标车道上游车辆车间距离较近或者车辆之间相对速度差较大时,扰动消散得较慢或者可能被放大[12]。由于车辆的速度主要受前导车的影响,当目标车辆换道后,目标车辆则成为前导车,会影响后随车的速度。根据跟驰理论可知,前导车与后随车的车间距与车辆之间的相对速度差是影响后随车运动的两个重要因素。因此,车间距与相对速度差是换道后对后随车影响的重要因素。目标车换道后对后随车的影响程度应该与距离成反比,与相对速度差正比。权重系数由车辆的运动相近程度和信息可靠度两部分构成。
假设不考虑车辆的横向速度、横向加速度,目标车换道后,原车道上目标前车V1与其第一辆后随车FV1的车间距、相对速度差分别记为SV、ΔvV;与其第二辆后随车FV2的车间距、相对速度差分别记为SV1、ΔvV1。依次类推,SVi、ΔvVi分别表示车辆V与其后第i+1辆后随车FVi+1的车间距和相对速度差,如图2。
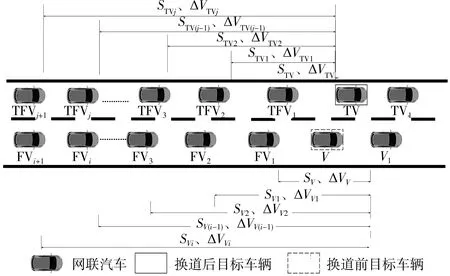
图2 改进加权MOBIL示意
SVi=‖xV(i+1)-xV‖-lV
(12)
ΔvVi=vV-vV(i+1)
(13)
hi=βiTi
(14)
(15)
(16)
式中:xV(i+1)为车辆V的第i+1辆后随车的纵向位置;vV(i+1)为车辆V的第i+1辆后随车的速度;βi为车辆与其第i+1辆后随车的运动相近程度;Ti为车辆与其第i+1辆后随车的信息可靠度;hi为原车道通信范围内车辆的权重。
同理,目标车换道后,在目标车道上目标车TV与其第一辆后随车TFV1的车间距、相对速度差分别记为STV、ΔvTV;与其第二辆后随车FV2的车间距、相对速度差分别记为STV1、ΔvTV1。依次类推,STVj、ΔvTVj分别表示车辆TV与其后第j+1辆后随车TFVj+1的车间距和相对速度差,如图2。
STVj=‖xTV(j+1)-xTV‖-lV
(17)
ΔvTVj=vTV-vTV(j+1)
(18)
hj=βjTj
(19)
(20)
(21)
式中:xV(j+1)为目标车道上车辆V的第j+1辆后随车的纵向位置;vV(j+1)为目标车道上车辆V的第j+1辆后随车的速度;βj为目标车道上目标车辆与其第j+1辆后随车的运动相近程度;Tj为目标车道上目标车辆与其第j+1辆后随车的信息可靠度;hj为目标车道上通信范围内车辆的权重。
2.4 改进的加权MOBIL模型
在改进的MOBIL基础上,考虑了目标车辆换道后对目标车道上以及原车道上在通信范围内所有后随车的影响因子。由于目标车与每辆后随车之间的相对位置和相对速度不同,因此所造成的影响程度也不同。2.3节依据目标车与后随车的相对位置和相对速度设置了影响后随车的权重因子,依据传统MOBIL模型的两个方面(安全准则模型、激励准则模型),并结合选取改进的IDM跟驰模型,整合成改进的加权MOBIL模型。
改进的IDM跟驰模型如式(22):
(22)
改进的安全准则模型如式(23):
(23)
改进的加权激励准则模型如式(24):
(24)
3 仿真实验与评价
笔者进行交通流数值仿真实验,模拟不同的仿真实验环境。将网联自动驾驶换道决策模型与传统的换道决策模型进行比较,通过时空轨迹图和延误表来评估改进的加权网联自动驾驶换道决策模型和传统换道决策模型的交通流运行效率。
3.1 仿真环境与参数的设置
模拟无交织区的高速公路仿真实验场景,利用MATLAB进行交通数值仿真,仿真实验设置了4组换道决策模型与跟驰模型组合模拟的网联自动驾驶车辆交通流场景。组合1模拟适用于传统人工驾驶的换道决策模型(MOBIL)和传统的跟驰模型(IDM)的人工环境下的交通流情况;组合2模拟了适用网联驾驶的跟驰模型(改进IDM)和传统的换道决策模型(MOBIL)的交通流场景;组合3模拟了适用于网联自动驾驶的跟驰模型(改进IDM)和换道决策模型(改进MOBIL)的交通流场景;组合4模拟了适用于网联自动驾驶的跟驰模型(改进IDM)和换道决策模型(改进的加权MOBIL)的交通流场景。
在仿真实验中,如果车辆的行驶特征一致,可能导致交通流形成固定的运动状态。因此,将实验中的车辆分为两类,依据不同的行驶速度分为快车和慢车。在我国高速公路上最低限速60 km/h,最高限速120 km/h。因此将快车的期望速度设置为 28 m/s(100 km/h),为了增加速度的不均匀程度,每辆快车的速度变化为±20%,快车均匀分布在23~33 m/s。同理,慢车期望速度设置为20 m/s(70 km/h),慢车期望速度均匀分布在17~22 m/s。在所有车辆中快车和慢车比例为8∶2。仿真时长为300 s,更新时间步长为0.1 s。为了防止换道引起的碰撞,设置的最大安全减速度bsafe应该小于车辆的最大可能加速度9 m/s2。若给定的最大安全减速度值过大会引起交通流的扰乱。最大安全减速度为4 m/s2,考虑驾驶的舒适性,设置最大安全减速度为2 m/s2。礼貌参数ρ表示利他主义强度,当ρ=0时,完全的利己主义;当ρ∈(0,1)时,同时兼顾自己与整体的效益;当ρ>1时,完全的利他主义。为了保证车辆能够追求更快的速度兼顾整体的效益,设置ρ=0.1。根据MOBIL模型、IDM模型、改进的IDM模型以及参考现有文献[13-14]中的取值,车辆的最大加速度amax=1.5 m/s2,静止安全距离S0=2 m,安全车头时距T=1.2 s,车辆的舒适减速度b=2 m/s2,加速度指数δ=4,换道效益阈值Δath=0.3 m/s2。此外,假定车辆的长度lV=4 m。模型参数设置如表1。

表1 交通流模型参数
3.2 仿真结果定性分析
通过绘制车辆时空轨迹图,将笔者提出的改进的网联自动驾驶换道决策模型与传统MOBIL模型进行比较和分析。车辆时空轨迹图能够将所有车辆直观的体现在仿真实验中,所有车辆的速度分布情况,扰动产生的时间、位置和传播特征定性地描述了交通流的均质性。4组换道决策模型和跟驰模型组合下的时空轨迹如图3~图6。
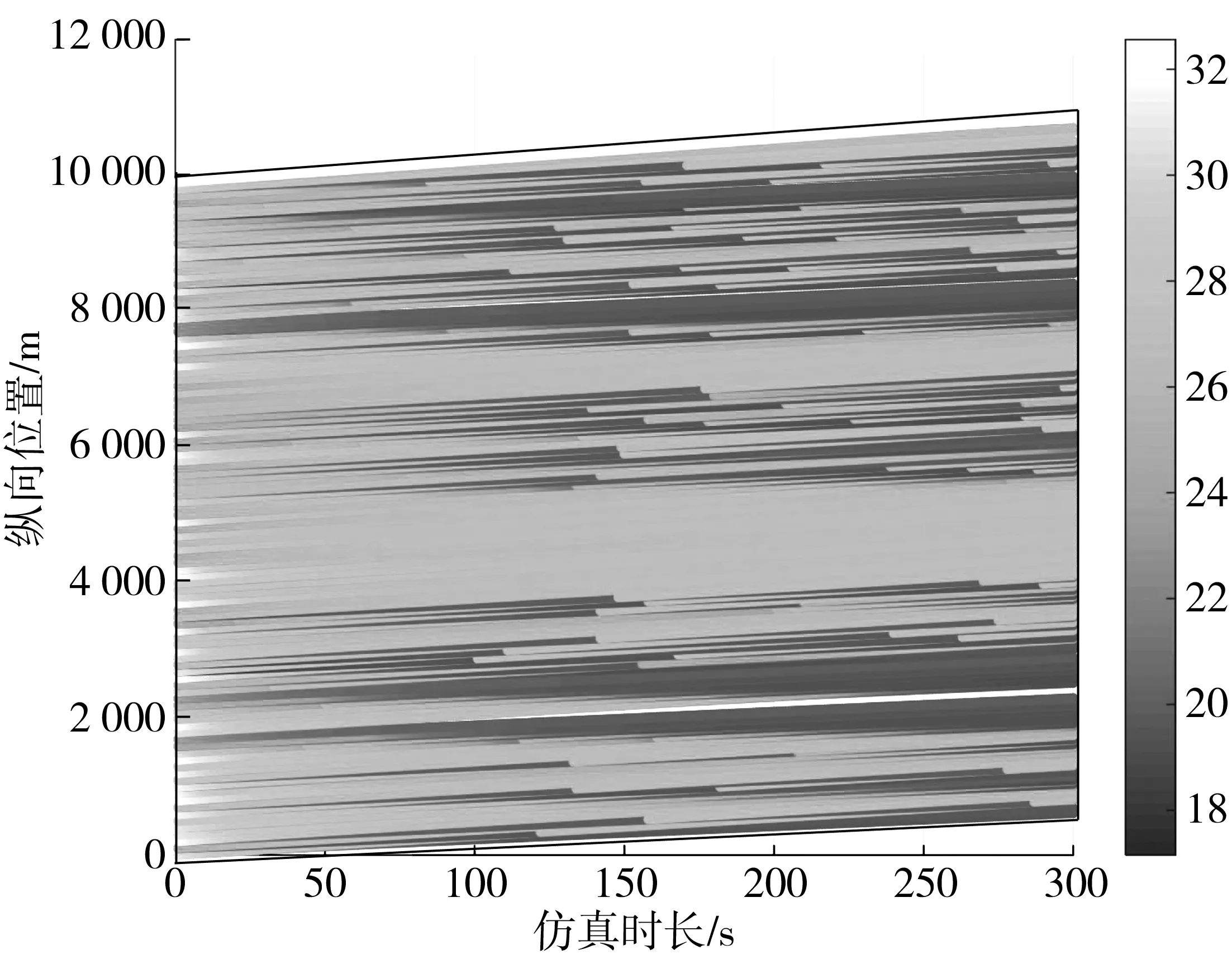
图3 传统MOBIL+传统IDM车辆时空轨迹

图4 传统MOBIL+改进IDM车辆时空轨迹

图5 改进MOBIL+改进IDM车辆时空轨迹
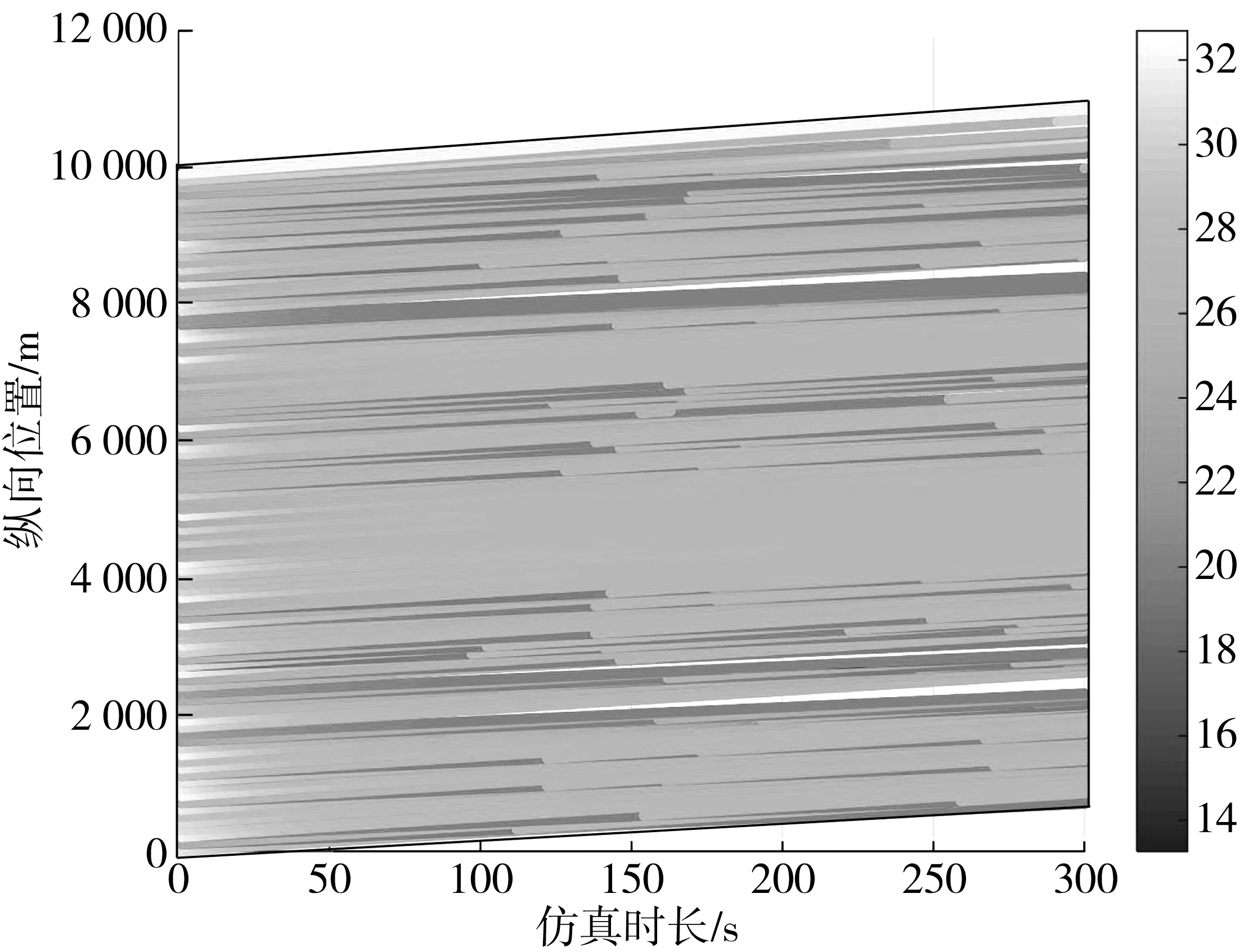
图6 改进加权MOBIL+改进IDM车辆时空轨迹
图3中的交通流平均速度较低,交通流的均质性较差,说明在传统人工环境下换道交通流的整体效率较低。图4、图5中的车辆时空轨迹图中车辆以较高的速度行驶的比例较高,图6中车辆时空轨迹图车辆以较高的速度运行比例最高,说明了网联自动驾驶车辆仍能够保持较高的平均速度和较好的均质性。因此笔者提出的基于MOBIL改进的网联自动驾驶车辆换道决策模型能够较好地提高部分车辆的运行速度。
3.3 仿真结果定量分析
延误是可以体现交通流效率的一个重要指标,频繁的换道或者不合理的换道会对交通流有巨大的干扰。图7是在仿真实验中,不同组合下的总延误,图8是不同组合下的平均延误,图9是不同组合下的延误占行程时间比例。从图7~9中可以看出,组合1的总延误、平均延误和延误占行程时间比例均最高,组合2、3、4均比组合一要低很多,说明在传统人工环境下,换道延误时间较长,整体交通流效率较低。侧向说明网联自动驾驶模型能够减少行车延误,提高交通流效率。

图7 不同组合下的总延误

图8 不同组合下的平均延误
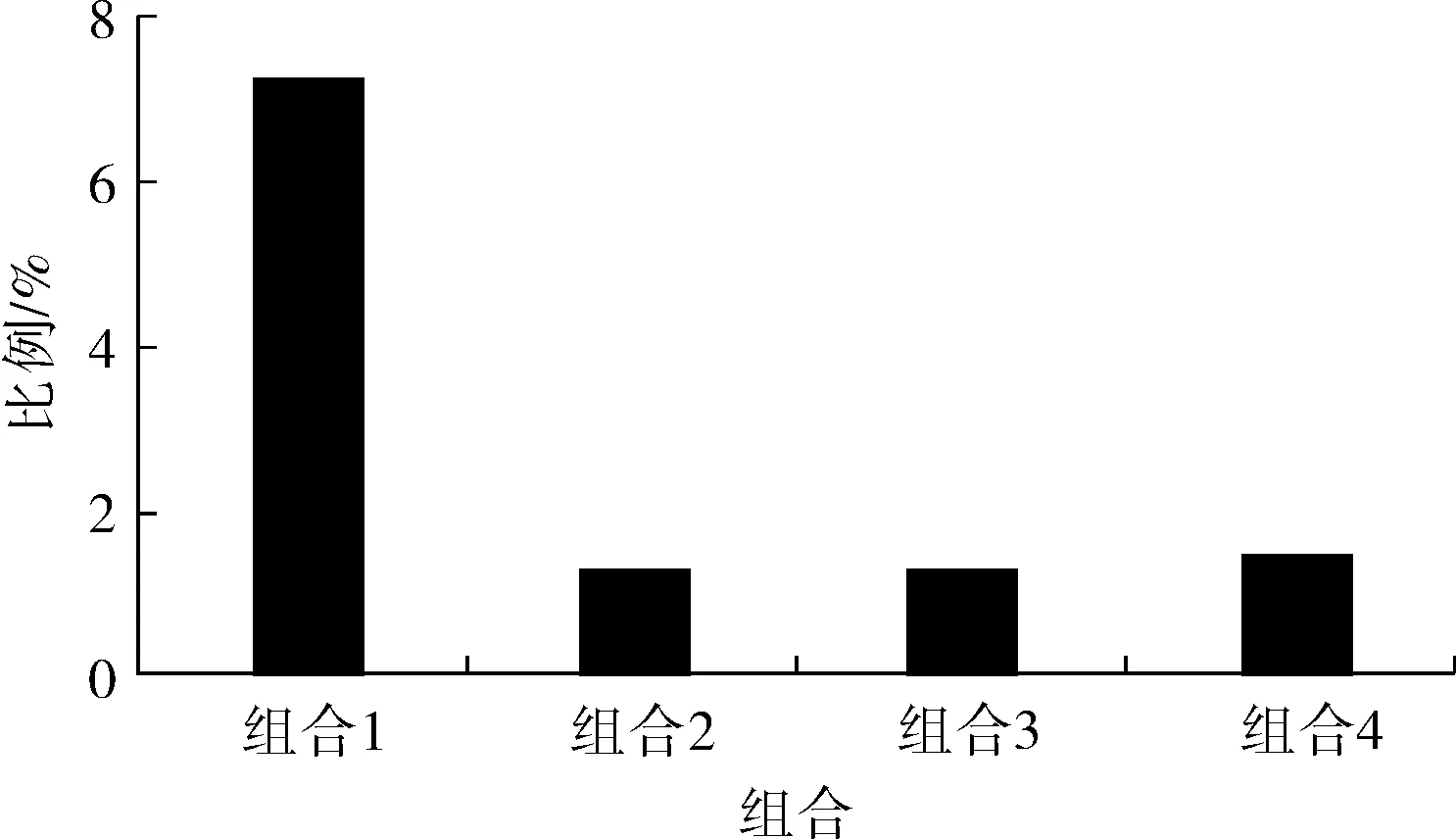
图9 不同组合下的延误占行程时间比例
总减速度是用来表示上游车辆整体制动的情况,频繁的制动会影响行车的舒适性。图10和图11分别表示不同组合下的总减速度和平均减速度。从图10~11中可以看出,组合1的总减速度和平均加速度均最高,组合2、3、4的减速度都很接近,表明网联自动驾驶环境下整体制动幅度小于人工的驾驶环境。在换道中考虑多辆后随车的不同影响可以减少整体的制动幅度。
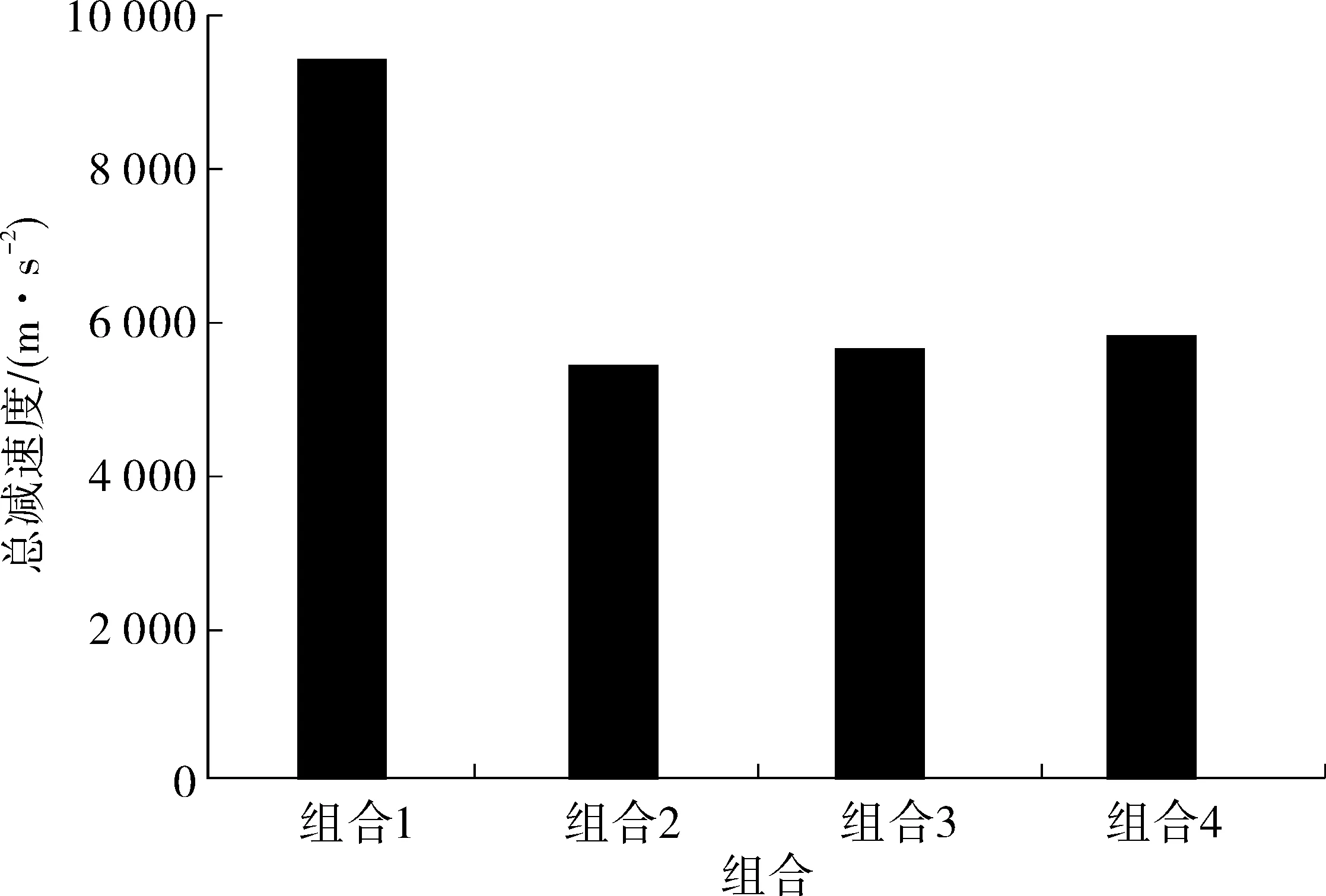
图10 不同组合下的总减速度

图11 不同组合下的平均减速度
4 结 语
在高速公路上频繁地、不合理地换道会导致交通流的紊乱,在交通瓶颈处甚至会导致交通拥堵。笔者研究了网联自动驾驶环境下自主性换道决策模型,考虑车辆换道后对原车道和目标车道上多辆后随车的影响不均匀性,通过通信范围内的所有后随车与目标车之间的相对运动状态关系,构建影响权重因子的表达式,建立改进的加权MOBIL自主性换道决策模型,对高速公路上交通流换道行为进行数值仿真。通过仿真车辆的时空轨迹图定性与定量分析车辆运行的速度变化情况和整体交通流的均质性,与传统的换道模型和现有网联换道模型进行了比较,验证了改进的加权MOBIL换道决策模型能够减少交通拥堵,提高交通流的运行效率,更有效地仿真实际交通流情形下换道行为。该模型是对MOBIL换道决策模型在理论上的扩展,在未来网联自动驾驶环境下换道行为仿真方面具有潜在的实际应用。
猜你喜欢
内燃机与配件(2022年2期)2022-01-17 23:46:44
高技术通讯(2021年3期)2021-06-09 06:57:30
专用汽车(2018年10期)2018-11-02 05:32:26
东南大学学报(自然科学版)(2018年1期)2018-02-08 00:40:30
中国公共安全(2017年9期)2017-02-06 03:05:39
山东工业技术(2016年15期)2016-12-01 05:31:34
西南交通大学学报(2016年3期)2016-06-15 20:29:35
专用汽车(2016年1期)2016-03-01 04:13:10
中国工程咨询(2016年1期)2016-02-14 06:47:44
数学年刊A辑(中文版)(2014年1期)2014-10-30 01:48:12