
基于交流电流下垂特性控制的VSC建模和稳定性分析
2021-05-18 03:48赵雨童张博深
电力自动化设备 2021年5期
赵雨童,高 飞,张博深
(上海交通大学 电力传输与功率变换控制教育部重点实验室,上海200240)
0 引言
随着新能源的大量使用,光伏电池板、风力发电机和微型燃气轮机等分布式发电装置日渐成为满足负荷增长需求、减少环境污染、提高能源综合利用效率和供电可靠性的一种有效途径[1]。在分布式能源的增长趋势下,直流微电网技术受到了广泛关注。直流微电网可以单独为本地负载供电,即运行在孤岛模式;也可以在并网模式下运行,与电网进行能量交换[2]。直流微电网能够实现2种模式的灵活切换,且相较于传统大电网没有无功损耗和相位不匹配的问题,因而更适用于分布式新能源的接入[3]。
下垂控制是在直流微电网中广泛使用的成熟技术,能够控制直流母线电压的稳定且精准地分配分布式能源的功率输出[4]。已有的下垂特性有:以直流电压为反馈量给出直流电流参考值的I-V下垂特性、以直流电压为反馈量给出输出功率参考值的P-V下垂特性、以直流电流为反馈量给出直流电压参考值的V-I下垂特性和以输出功率为反馈量给出直流电压参考值的V-P下垂特性[5]。这些传统的下垂特性均能够实现稳定直流母线电压和准确分配分布式能源功率,但都是基于双闭环控制的电压源型换流器VSC(Voltage Source Converter)[6-7],其结构复杂,所需要的传感器较多,成本较高,且响应时间是单闭环控制VSC的10倍[8]。
本文提出了一种新型的下垂特性,即以直流电压为反馈量给出交流电流参考值的Id-V下垂特性,相比于传统下垂特性不需要外环控制,简化了系统结构,减少了传感器数目,降低了成本,并且填补了交流变量在直流微电网下垂特性中的研究空白。
在传统下垂控制的特性下,系统可以通过设置下垂系数来达到准确控制分布式能源直流侧功率输出的目标[8-9]。然而,由于Id-V下垂特性没有直接控制直流侧变量,所以在调节直流侧功率分配上的精确度下降。自适应的下垂特性是提升下垂控制功率分配精度、改善系统性能的有效手段[10-11]。文献[12-13]采用自适应下垂控制有效地改善了由各分布式能源输出阻抗和线路阻抗的差异导致的功率分配不准确。为提升功率分配精度,本文设计了自适应的下垂系数来解决交流侧电压和电阻对Id-V下垂控制系统的功率分配的影响,实现了直流侧功率的准确分配。
针对直流微电网的稳定性分析,基于状态空间建模的特征根轨迹法是准确有效的系统稳定性分析方法[15]。文献[16]对传统下垂特性控制下的VSC建立了状态空间模型,并且绘制了特征根轨迹,对比分析了不同传统下垂特性控制下的VSC稳定性。文献[17-18]建立了直流微电网的状态空间模型,分别研究了母线电压控制器和有源负载对微电网稳定性的影响。
本文对含自适应下垂系数的Id-V下垂控制VSC建立状态空间模型,并与传统的I-V下垂控制系统的状态空间模型进行对比,然后利用特征根轨迹法对比2 种下垂特性下系统的稳定性;构建了由Id-V下垂控制VSC 组成的微电网,建立微电网的状态空间模型并研究其稳定性;搭建Id-V下垂控制VSC、传统的I-V下垂控制VSC 与微电网的仿真模型,对稳定性分析和功率分配进行验证。
1 系统模型分析
1.1 VSC内环结构
VSC 的内环结构框图如图1 所示,在旋转坐标系下分别控制d、q轴的交流电流。图中,vabc为交流侧三相电压;iabc为交流侧三相电流;mabc为VSC 的调制信号;vd、vq分别为VSC 在d、q轴上的交流侧电压;id、iq分别为VSC 在d、q轴上的交流侧电流;irefd、irefq分别为id、iq的参考值;ed、eq分别为在d、q轴上的交流电源电压;Ls为VSC 的电感滤波器的电感;Rs为电感滤波器的寄生电阻;Cdc为VSC 的输出电容,作用是增加稳定裕度和减小电流纹波;idc为VSC 直流侧电流;vdc为VSC直流侧输出电压;io为滤波后的直流输出电流;ω为交流电源的基波频率。通过锁相环PLL(Phase Locked Loop)模块得到交流电源的d轴电压的相位θ作为Park 变换的同步信号,输入abc/dq变换模块。所有双闭环控制VSC 的内环结构均如图1所示。

图1 VSC内环结构图Fig.1 Inner-loop structure diagram of VSC
根据图1,电感滤波器的电压、电流关系为:
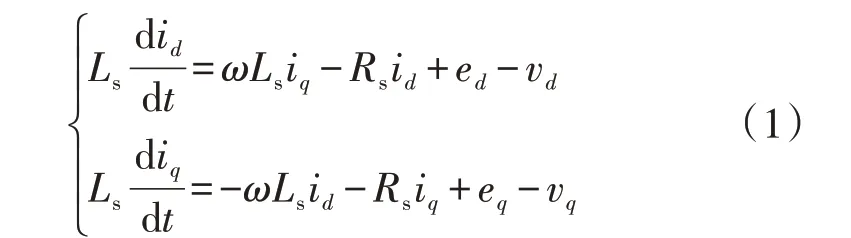
结合式(1)和图1 中控制回路,VSC 为多输入多输出MIMO(Multiple Input Multiple Output)系统,可以通过解耦项将该MIMO 系统解耦为2 个单输入单输出SISO(Single Input Single Output)系统,即在d轴和q轴分别控制有功功率和无功功率[19]。这种解耦控制方法是Id-V下垂特性通过控制d轴电流进而控制有功功率的理论基础。
1.2 传统I-V下垂控制系统模型
传统的下垂特性根据下垂控制回路输出的参考值设计VSC 的外环控制回路。例如,传统I-V下垂控制系统中,下垂控制器输出直流电流参考值,相应地,双闭环VSC 的外环为直流电流环。图2 为传统I-V下垂控制系统的简化原理图,图中Vo为母线电压参考值。
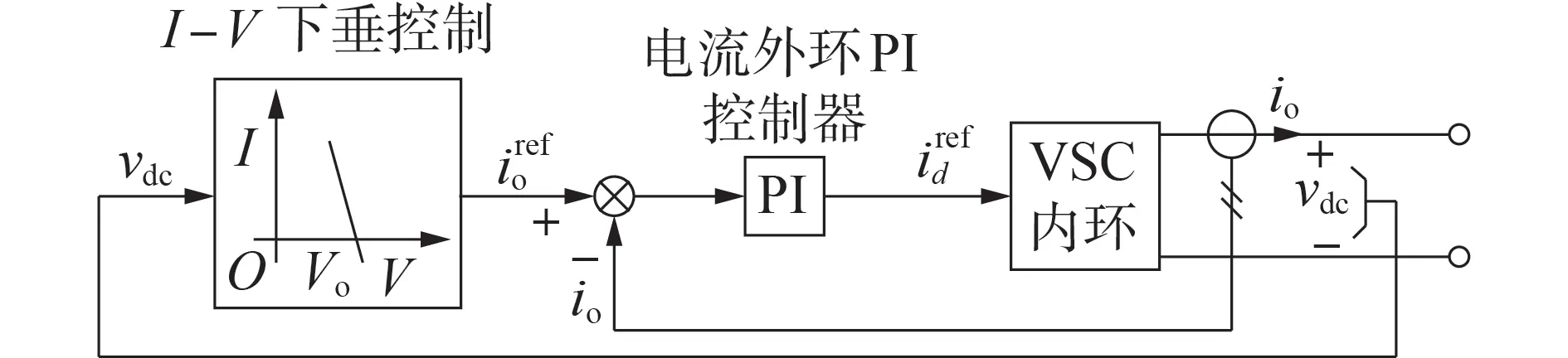
图2 传统I-V下垂控制系统结构图Fig.2 Structure diagram of traditional I-V droop control system
其中,k为下垂系数。
1.3 Id-V下垂控制系统模型
与图2 中传统I-V下垂控制系统相比,Id-V下垂控制系统直接给出了内环交流电流参考值,不需要设计相应的外环结构,因此减少了1个PI控制器,提升了系统响应速度,并且不需要测量直流侧电流,系统结构更加简单。Id-V下垂控制系统的简化原理图如图3所示。

图3 Id-V下垂控制系统结构图Fig.3 Structure diagram of Id-V droop control system

1.4 微电网模型
下垂控制主要是为了实现多机并联的功率分配以稳定直流母线电压,为了验证Id-V下垂控制的可靠性,搭建了以Id-V下垂特性控制的分布式交流电源并联供电的直流微电网,如图4所示。图中,Lsi(i=1,2)为VSCi的电感滤波器的电感;Rsi为电感滤波器的寄生电阻;Rlinei与Llinei为VSCi输出端口的线阻与线感;Ci为VSCi的输出电容。
分布式交流电源通过图3 所示的Id-V下垂控制VSC 维持直流母线电压稳定,为负载提供功率并控制分布式交流电源的功率分配。

图4 直流微电网结构图Fig.4 Structure diagram of DC microgrid
2 自适应Id-V下垂特性
2.1 Id-V下垂控制系统的功率分配
在忽略直流侧线路阻抗的情况下,并联Id-V下垂控制系统的直流侧电压vdc相等,由式(3)可知d轴电流与下垂系数成反比。

其中,idi、ki(i= 1,2,…,n)分别为VSCi的d轴电流、下垂系数,n为VSC 数量。由此可见可以通过设置下垂系数来控制d轴电流输入。
根据交流侧与直流侧功率守恒可以得出:

其中,Pi、ioi和vdci(i=1,2,…,n)分别为VSCi的输出功率、直流输出电流和直流侧电压。
由于并联下垂控制系统的直流侧电压vdc相等,式(7)可以进一步化简为:

由式(4)可知,Id-V下垂控制系统可以通过设置下垂系数准确地控制d轴电流的分配。然而,各个VSC 的d轴电压不同,导致输出功率与d轴电流不成比例。因此,通过设置下垂系数控制Id-V下垂控制系统的功率分配精度必然受到影响。
2.2 自适应调整的下垂特性
为实现Id-V下垂控制系统的精确功率分配,设计了如下自适应下垂系数:

其中,k′为自适应下垂系数,可通过采集直流电压和d轴电流得到。自适应下垂系数可以调整下垂特性,使得VSC输出功率按照设置的下垂系数准确分配。
采用自适应下垂系数k′的Id-V下垂特性的控制方程为:

采用自适应下垂系数的Id-V下垂控制VSC功率分配为:

其中,k′i为VSCi的自适应下垂系数。
由式(11)可以看出,采用自适应下垂系数的Id-V下垂控制VSC输出功率可以按照设置的下垂系数准确分配。
图5 为Id-V下垂控制系统分别采用定常数下垂系数k和自适应下垂系数k′时分布式交流电源功率输出比例。2 个并联VSC 设置相等的下垂系数或自适应下垂系数,功率输出比值应该为1∶1。由图5可以看出,采用定常数下垂系数的Id-V下垂控制系统,功率分配的精确度会随着负载功率的增加而下降,而采用自适应下垂系数的Id-V下垂控制系统能够实现功率的精确分配。
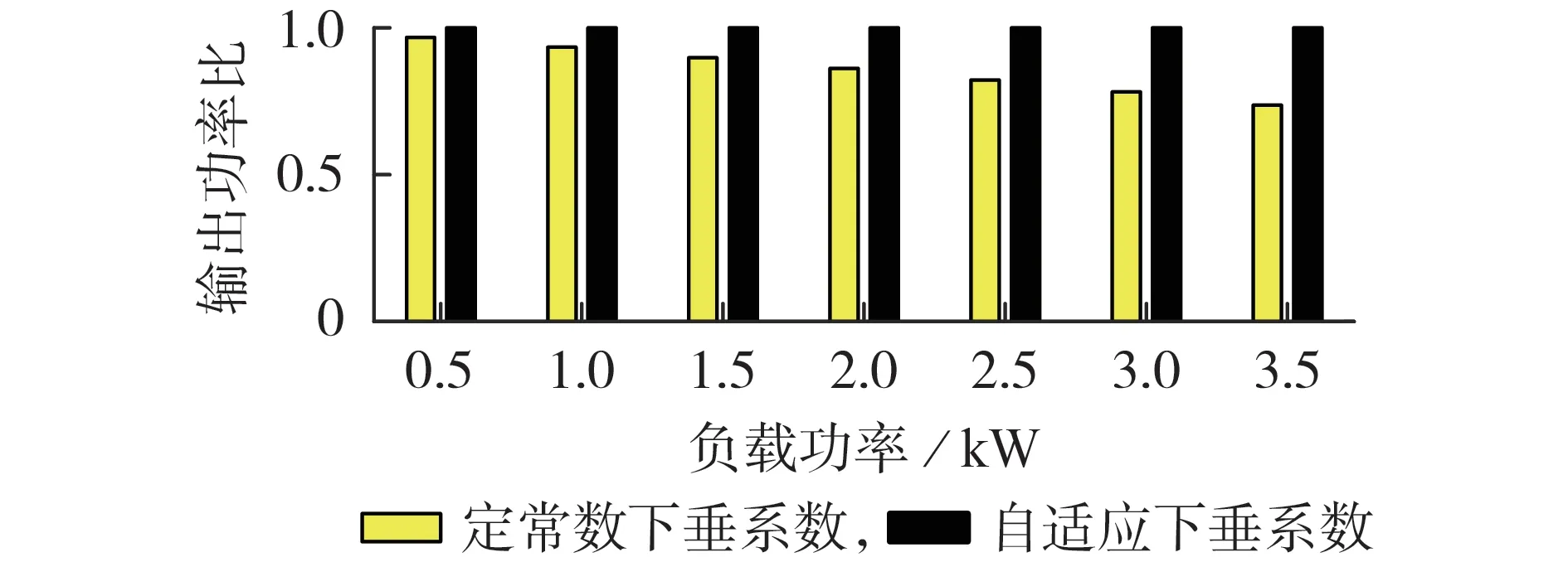
图5 不同负载情况下Id-V下垂控制系统的功率分配Fig.5 Power distribution of Id-V droop control system under different load powers
3 自适应的Id-V 下垂系统状态空间建模和根轨迹分析
3.1 Id-V下垂控制系统状态空间建模
状态空间平均模型即在一个开关周期内求变量平均值的方法,并以状态方程的形式建立各变量间的关系,进而建立平均状态方程,该方法能消除VSC中高频纹波对各变量的影响。对建立的平均状态方程进行小信号分析,进而绘制特征根轨迹可以准确有效地研究系统稳定性。

其中,xMG为直流微电网中的状态变量;AMG的表达式如附录A式(A3)所示。
对于建立的状态空间模型将通过MATLAB 中的LAT(Linear Analysis Tools)验证其准确性。
3.2 特征根轨迹与稳定性分析
基于建立的状态空间模型求取特征根,通过判断是否存在右半平面极点可以准确地判断系统的稳定性,通过改变系统参数来观察特征根的轨迹可以研究系统参数对稳定性的影响。
图6 为传统I-V下垂控制系统与Id-V下垂控制系统的特征根轨迹。2 个系统采用相同的电路参数和控制参数,增加传统I-V下垂特性下的电流外环控制带宽,绘制特征根轨迹与Id-V下垂控制系统特征根轨迹进行对比。对比2 个系统的主导极点(即系统最右侧的点)可知,Id-V下垂控制系统的主导极点始终在I-V下垂控制系统的主导极点左侧,验证了Id-V下垂控制系统具有更好的动态性能和稳定性[20]。

图6 Id-V下垂控制系统与传统I-V下垂控制系统的特征根轨迹Fig.6 Eigenvalue trajectories of Id-V droop control system and traditional I-V droop control system
随着自适应下垂系数k′的减小,Id-V下垂控制系统的特征根向右半平面移动,并在k′<1.2 时出现右半平面特征根,如图7 所示。这说明随着自适应下垂系数的减小,Id-V下垂控制系统的稳定性下降,且当k′<1.2 时系统会出现振荡。这一特性与传统I-V下垂控制系统相似[5]。

图7 自适应下垂系数从2降至0.3时Id-V下垂控制系统的特征根轨迹Fig.7 Eigenvalue trajectory of Id-V droop control system when adaptive droop gain decreases from 2 to 0.3
对2 个VSC 设置相同的自适应下垂系数并逐渐减小,直流微电网系统的特征根轨迹如图8 所示。可以看出,随着自适应下垂系数的减小,直流微电网系统的特征根向右半平面移动,并在小于1.7时出现右半平面特征根。与单个Id-V下垂控制VSC 相似,自适应下垂系数的减小会导致直流微电网系统的不稳定。
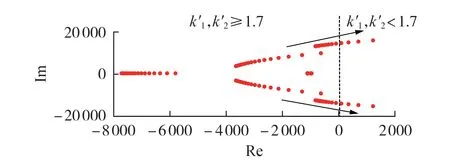
图8 自适应下垂系数变化时直流微电网系统的特征根轨迹(k′1、k′2均从4降至1)Fig.8 Eigenvalue trajectory of DC microgrid when both adaptive droop gains decrease from 4 to 1
4 仿真验证
为了验证本文提出的Id-V下垂特性的性能和稳定性分析的正确性,搭建了传统I-V下垂控制系统与Id-V下垂控制系统的仿真模型,VSC 参数见附录B表B1。
图9 为传统I-V下垂控制系统与Id-V下垂控制系统的直流电压响应仿真结果。2 个系统在1.0 s 前到达稳态,1.0 s 时在直流母线电压参考值上加入阶跃信号。由图9 可知,相比于传统I-V下垂控制系统,Id-V下垂控制系统的直流电压响应时间更短,超调量更小,动态性能更优越,验证了由图6 得出的结论。

图9 直流电压响应Fig.9 DC voltage response
图10 为Id-V下垂控制系统的直流电压响应仿真结果。0.14 s 之前,VSC 直流侧输出稳定,k′<1.3;0.14 s 时设置k′=1.2,VSC 直流侧产生收敛的振荡且能达到稳态,系统依然稳定;0.18 s 时设置k′=1.1,VSC 直流侧产生发散的振荡,系统不稳定。仿真结果验证了图7 中得到的自适应下垂系数稳定边界,也进一步验证了所建立的状态空间平均模型的正确性。

图10 自适应下垂系数从1.3降至1.1时Id-V下垂控制系统的直流电压响应Fig.10 DC voltage response of Id-V droop control system when adaptive droop gain decreases from 1.3 to 1.1
在MATLAB/Simulink 中搭建如图4 所示的直流微电网系统仿真模型,以验证直流微电网系统稳定性分析的正确性,利用Id-V下垂特性调节分布式交流电源功率分配的准确性以及维持电压的能力,直流微电网的参数见附录B表B2。
图11 为Id-V下垂控制下分布式交流电源功率分配的仿真结果。2 个Id-V下垂控制系统的下垂系数设置为k1=1 和k2=2,对应的直流电流输出比例应为2∶1。在0.5 s 之前直流电流输出比例为io1∶io2=8.748∶4.407≈1.98∶1,存在误差,0.5 s 时自适应下垂系数在系统中投入使用,直流电流输出比例为io1∶io2=8.804∶4.402=2∶1,实现了准确的功率分配。

图11 并联Id-V下垂控制系统的直流电流输出Fig.11 DC output current of two parallel Id-V droop control systems
图12 为直流微电网母线电压的仿真结果,在0.2 s 之前,母线电压稳定,2 个VSC 的自适应下垂系数均设置为2;0.2 s 时,2 个VSC 的自适应下垂系数均设置为1.8,母线电压产生收敛的振荡且能达到稳态,系统依然稳定;0.22 s 时2 个VSC 的自适应下垂系数均设置为1.6,母线电压产生发散的振荡,系统不稳定。仿真结果验证了由图8得出的结论。

图12 直流微电网母线电压Fig.12 Bus voltage of DC microgrid
5 结论
本文提出了一种新型下垂特性,拓宽了直流微电网中只基于直流变量的传统下垂特性,研究了交流电流在传统微电网中的下垂特性。在对比研究传统I-V下垂特性与Id-V下垂特性后,得出以下结论:
(1)在特征根轨迹分析和仿真结果中,与传统的I-V下垂控制系统相比,Id-V下垂控制系统具有更好的动态性能和稳定性;
(2)采用自适应下垂系数时,并联Id-V下垂控制系统可以实现精确的功率分配,并通过仿真结果进行了验证;
(3)与传统I-V下垂控制系统相似,随着下垂系数的减小,Id-V下垂控制系统的稳定裕度也随之减小甚至会出现振荡失稳的现象。
附录见本刊网络版(http://www.epae.cn)。
猜你喜欢
测控技术(2021年10期)2021-12-21
铁道通信信号(2020年9期)2020-02-06
数学大王·趣味逻辑(2019年5期)2019-06-13
小学科学(学生版)(2019年5期)2019-05-21
通信电源技术(2018年3期)2018-06-26
电源技术(2015年11期)2015-08-22
电测与仪表(2015年4期)2015-04-12
电测与仪表(2015年10期)2015-04-09
电测与仪表(2015年5期)2015-04-09
电机与控制应用(2013年9期)2013-11-21
