GLONAS S 单双频伪距单点定位精度分析
2021-05-16 09:23:48李柯桦陈永福
经纬天地 2021年1期
李柯桦 陈永福
(云南省测绘工程院,云南 昆明 650031)
0.引言
俄罗斯的格洛纳斯(GLONASS)系统是继美国GPS系统第二个投入使用的全球卫星定位系统,于2009年开通全球定位服务,目前在轨卫星共计24颗,能提供G1、G2、G3三个频率信号,但由于技术问题以及接收机硬件限制,全球跟踪站大部分接收机只能接收到G1和G2两个频率[1-3]。伪距单点定位是根据伪距观测值,利用单台接收机,实现米级甚至分米级定位技术,该技术目前发展比较成熟,在车辆、船舶、飞机等领域被广泛应用[4-6]。当前国内学者单独分析GLONASS定位性能的较少,主要集中在多系统组合定位性能分析方面,文献[7]分析GPS/BDS/GLONASS三系统组合伪距单点定位精度,发现双系统组合相比单系统在卫星可见数、PDOP值以及定位精度方面都有较大改善,而三系统组合相比双系统又有较大改善。文献[8]表明美国对俄罗斯卫星部件的限制将影响GLONASS定位性能,在GLONASS新老卫星交替之际,其定位性能将会受到很大影响。文献[9]评估了亚太地区GPS/GLONASS/Galileo/BDS组合实时精密单点定位性能,发现与GPS单系统精密单点定位于收敛时间相比较,四系统组合定位精度与收敛时间有很大改善,静态精密单点定位在E方向、N方向、U方向收敛时间分别改善了43%、19%、26%,定位精度分别改善了16%、25%、10%,动态精密单点定位在E方向、N方向、U方向收敛时间分别改善了61%、35%、51%,定位精度分别改善了29%、30%、21%。文献[10]分析了GLONASS星载钟性能,发现GLONASS星载铯钟的频率准确度在10-13~10-12量级,频率漂移率小于1×10-14/d,日稳定度优于1×10-13。
GLONASS作为全球四大卫星导航定位系统之一,对其定位性能分析是十分必要的。本文基于欧洲、中国以及澳大利亚地区各一个连续跟踪站GLONASS系统G1/G2双频数据,详细分析了该系统G1、G2单频,G1/G2组合双频伪距单点定位精度。
1.GLONASS 系统伪距单点定位模型
单点定位是通过后方交会原理实现的,通常在实际应用中所说的伪距单点定位是单频伪距单点定位,一般单频伪距单点定位观测值模型表示如公式(1)[11-13]:

式中,Pi表示伪距观测值;i表示频率;r表示测站接收机;s表示卫星;(Xi,Yi,Zi)表示卫星在空中位置坐标;(X,Y,Z)表示接收机位置坐标;c表示真空中光的速度;dtr表示接收机钟差;dts表示卫星钟差;Vion表示电离层延迟误差;Vtrop表示对流层延迟误差;δi表示星历误差;δmul表示多路径效应误差;εi表示观测噪声。
在进行GLONASS单频伪距单点定位时,电离层延迟误差和对流层延迟误差分别通过Klobucha模型和Saastamoinen模型进行改正。双频组合伪距单点定位常用的模型为双频无电离层组合模型,一般表示如公式(2)和公式(3)[14,15]:

式中,1、2表示频率号;a,b表示双频无电离层组合系数;f表示频率。
2.试验数据分析
为详细分析GLONASS系统G1、G2单频,G1/G2组合双频伪距单点定位精度,以MGEX结构发布的观测数据为试验解算数据,选取数据的时间段为2020年3月4日全天24h,数据采样频率为30s,具体信息(如表1所示)。GLONASS系统数据质量的好坏直接影响其定位精度的高低,因此在进行定位数据解算前对其数据质量进行评估是非常必要的。本文首先评估GLONASS系统G1频率和G2频率的数据质量,然后分析其定位精度。

表1 各连续跟踪站详细信息
2.1 数据质量评估
数据质量很大程度上决定导航定位的准确性和可靠性,如果数据质量过差,则不能进行数据解算,常规的数据质量评估指标主要有数据完整率、信噪比、多路径以及周跳比。本文选取信噪比以及多路径两项数据质量评估指标进行GLONASS系统G1频率和G2频率数据质量评估。
信噪比是观测信号强度与噪声的比值,信噪比越大,表明观测信号强度越强,信噪比可以直接从观测文件中获取[16]。根据获取的信噪比,计算得到G1频率和G2频率信噪比和高度角的关系(如图1所示):

图1 GLONASS系统G1频率和G1频率信噪比
GLONASS系统G1和G2两个频率信噪比随着高度角的增加而增加,个别卫星的信噪比较低,但大多数卫星的信噪比增加至53dB-Hz左右而停止,表明G1和G2两个频率信号强度较强。
多路径是接收机除接收到卫星直接发射的信号外,还会接收到经过各种地物反射的信号,多种信号叠加而产生的延迟[17,18]。计算得到GLONASS系统G1频率和G2频率的多路径(如图2所示):

图2 GLONASS系统G1频率和G1频率多路径
GLONASS系统G1频率和G2频率多路径整体在±3m以内,随着高度角的增加而减小,当高度角接近90°时,两个频率的多路径趋于±1m以内,并且未观测到与高度角有关的系统偏差。
2.2 定位结果分析
在进行数据解算时,采用东京海洋大学开发的RTKLIB软件进行数据解算,首先根据常规单频伪距单点定位模型解算得到G1频率、G2频率单频单历元坐标值,然后采用双频无电离层组合模型解算得到G1/G2双频组合伪距单点定位单历元坐标,最后以IGS中心提供的周解算坐标作为参考值,算得到不同频率下的定位误差,计算顺序为KIR8连续跟踪站、JFNG连续跟踪站、CUT0连续跟踪站。
可见卫星数与PDOP值都是GNSS定位中常见的分析指标,若可见卫星数少于4颗,则不能进行定位,相反卫星可见数越多,定位精度越高,计算得到的PDOP值越小,解算得到的定位精度越高。首先计算得到KIR8连续跟踪站、JFNG连续跟踪站、CUT0连续跟踪站GLONASS系统不同连续跟踪站卫星可见数与PDOP值(如图3、图4所示):

图3 卫星可见数
位于欧洲地区的KIR8站卫星可见数变化比较平稳,在7-9颗之内变化,位于中国地区的JFNG站与位于澳大利亚地区的CUT0站可见卫星数变化较大,且变化范围一致,在5-9颗之内变化。
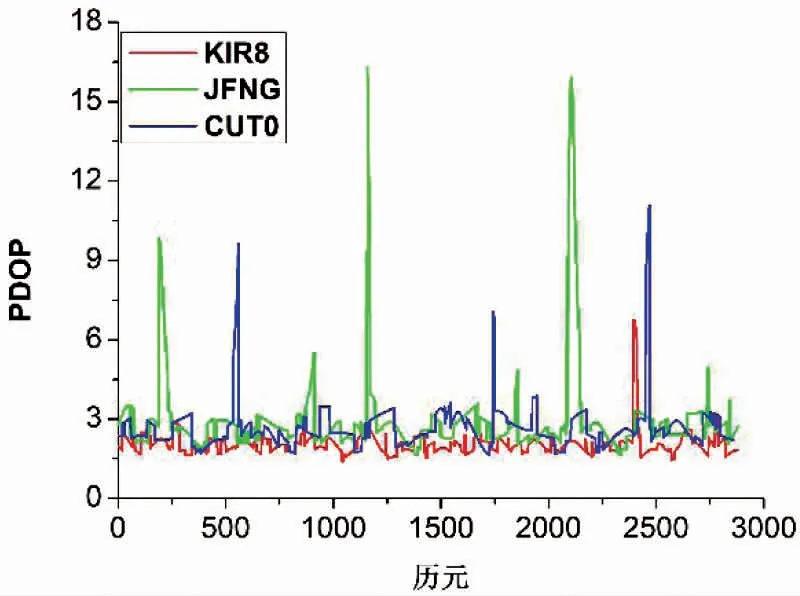
图4 PDOP值
位于欧洲地区的KIR8站PDOP值变化比较平稳,除位于2500历元左右突然变大外,整体PDOP值小于3,而位于中国地区的JFNG站与位于澳大利亚地区的CUT0站的PDOP值较KIR8站较大,且突变点较多,JFNG站PDOP值最大达到了17,CUT0站PDOP值最大达到了11。

图5 KIR8连续跟踪站GLONASS系统单频伪距单点定位误差
如图5所示,KIR8连续跟踪站GLONASS系统G1频率伪距单点定位E方向和N方向定位误差变化情况相当,都在±5m范围内变化,U方向的定位误差相比E和N方向较大,在±15m范围内变化。G2频率伪距单点定位三个方向的定位误差表现出不一致性,N方向定位误差最小,在±4m范围内变化,其次是E方向定位误差,在±6m范围内变化,U方向定位误差最大,在±20m范围内变化。GLONASS系统G1/G2双频组合频率伪距单点定位E方向和N方向定位误差相比单频定位误差较大,在±6m范围内变化,U方向定位误差与单频U方向定位误差相当,在±18m范围内变化。
根据计算得到GLONASS系统G1频率、G2频率、G1/G2组合频率的定位误差,计算得到E方向、N方向、U方向的定位精度(RMS)、平均卫星数以及平均PDOP值(如表2所示):

表2 KIR8站GLONASS系统单双频伪距单点定位结果统计
KIR8连续跟踪站G2频率伪距单点定位精度相比于G1频率伪距单点定位精度略高,GLONASS系统的平均卫星可见数完全满足一般定位要求,达到了8颗,平均PDOP值也满足一般情况卫星空间分布情况要求,为2.05。G1频率伪距单点定位精度E方向和N方向定位精度较高,优于1.2m,U方向定位精度略差,优于3m。
G2频率伪距单点定位E方向和N方向精度与G1频率相当,优于1.2m,U方向定位精度也相差不大,优于3m。GLONASS系统G1/G2组合伪距单点定位精度低于G1、G2频率精度,E方向定位精度达到了1.18m、N方向定位精度达到了1.39m、U方向定位精度达到了3.43m。
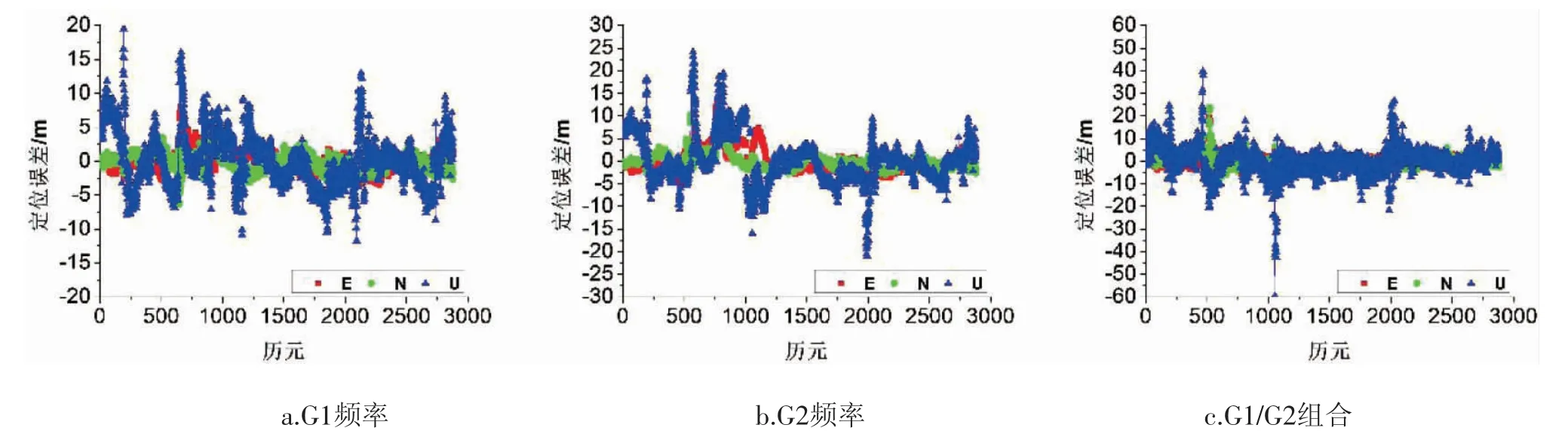
图6 JFNG连续跟踪站GLONASS系统单频伪距单点定位误差
如图6所示,JFNG连续跟踪站GLONASS系统G1频率伪距单点定位E方向定位误差在±10m之内变化、N方向定位误差在±10m之内变化、U方向定位误差在±20m之内变化,G2频率伪距单点定位E方向定位误差在±15m之内变化、N方向定位误差在±15m之内变化、U方向定位误差在±30m之内变化。GLONASS系统G1/G2双频组合频率伪距单点定位E方向定位误差在±30m之内变化、N方向定位误差在±30m之内变化、U方向定位误差在±60m之内变化。
根据计算得到GLONASS系统G1频率、G2频率、G1/G2组合频率的定位误差,计算得到E方向、N方向、U方向的定位精度(RMS)、平均卫星数以及平均PDOP值(如表3所示):

表3 JFNG站GLONASS系统单双频伪距单点定位结果统计
JFNG连续跟踪站G1频率伪距单点定位精度相比于G2频率伪距单点定位精度略高,可能由于所选测站区域原因,GLONASS系统平均卫星可见数只有6颗,平均PDOP值较大,为2.92。G1频率伪距单点定位精度三个方向定位精度相差较大,其中E方向定位精度最高,优于1.3m,其次为N方向定位精度,优于1.7m,U方向定位精度最差,优于4m。G2频率伪距单点定位三个方向定位精度的高度次序与G1频率相当,分别为E方向精度优于2m、N方向精度优于3m、U方向精度优于6m。GLONASS系统G1/G2组合伪距单点定位精度低于G1、G2频率精度,E方向定位精度达到了2.17m、N方向定位精度达到了1.89m、U方向定位精度达到了6.10m。
如图7所示,CUT0连续跟踪站GLONASS系统G1频率伪距单点定位E方向定位误差在±6m之内变化、N方向定位误差在±6m之内变化、U方向定位误差在±30m之内变化,G2频率伪距单点定位E方向定位误差在±10m之内变化、N方向定位误差在±10m之内变化、U方向定位误差在±30m之内变化。GLONASS系统G1/G2双频组合频率伪距单点定位E方向定位误差在±15m之内变化、N方向定位误差在±15m之内变化、U方向定位误差在±35m之内变化。

图7 CUT0连续跟踪站GLONASS系统单频伪距单点定位误差
根据计算得到GLONASS系统G1频率、G2频率、G1/G2组合频率的定位误差,计算得到E方向、N方向、U方向的定位精度(RMS)、平均卫星数以及平均PDOP值(如表4所示):

表4 CUT0站GLONASS系统单双频伪距单点定位结果统计
CUT0连续跟踪站G1频率伪距单点定位精度相比于G2频率伪距单点定位精度略高,可能由于所选测站区域原因,GLONASS系统平均卫星可见数只有7颗,平均PDOP值较大,为2.66。G1频率伪距单点定位精度三个方向定位精度相差较大,其中N方向定位精度最高,优于1.1m,其次为E方向定位精度,优于1.6m,U方向定位精度最差,优于4m。G2频率伪距单点定位三个方向定位精度的高度次序与G1频率相当,分别为N方向精度优于1.2m、E方向精度优于2.1m、U方向精度优于6m。GLONASS系统G1/G2组合伪距单点定位精度低于G1、G2频率精度,E方向定位精度达到了2.34m、N方向定位精度达到了1.63m、U方向定位精度达到了5.58m。
3.结束语
本文基于欧洲地区、中国地区以及澳大利亚地区IGS连续跟踪站GLONASS系统双频数据,首先评估了GLONASS系统双频数据质量,然后分析了GLONASS系统单双频伪距单点定位精度,经研究发现:(1)GLONASS系统双频数据质量良好,卫星颗见数与卫星空间几何构型较优,且呈现周期性变化,同时发现欧洲地区GLONASS系统卫星可见数与卫星可见构型优于中国地区与澳大利亚地区,中国地区与澳大利亚地区的可见数卫星数与卫星空间构型相当;(2)欧洲地区GLONASS系统G2频率的伪距单点定位精度略优于G1频率,中国地区与澳大利亚地区G1频率的伪距单点定位精度略优于G2频率,双频组合伪距单点定位由于观测噪声放大的原因,定位精度低于单频定位精度;(3)GLONASS系统在欧洲地区的定位精度优于中国地区与澳大利亚地区,中国地区与澳大利亚地区GLONASS伪距单点定位精度相当,为今后GLONASS系统的定位研究提供一定的参考。
猜你喜欢
军事文摘(2023年4期)2023-04-05 13:57:35
中国惯性技术学报(2020年2期)2020-07-24 08:41:02
山东冶金(2019年5期)2019-11-16 09:09:10
智富时代(2019年4期)2019-06-01 07:35:00
测控技术(2018年4期)2018-11-25 09:47:22
测绘科学与工程(2017年3期)2017-08-16 02:46:08
测绘通报(2016年12期)2017-01-06 03:37:13
山东工业技术(2016年15期)2016-12-01 05:31:14
信息记录材料(2016年4期)2016-03-11 15:22:33
导航定位学报(2015年2期)2015-06-05 09:27:38