雷达天线自动架机构的液压同步方法
2021-05-16 10:32郭向东
科学技术创新 2021年13期
郭向东
(中国电子科技集团公司第三十八研究所,安徽 合肥230088)
随着信息化战争的发展需要,雷达的机动性能对雷达的快速反应能力和战场生存能力有决定性影响[1,2]。大型地面雷达的天线口径越来越大,为满足较高的机动性,大口径天线阵面必然要采用分块处理和柔性展开/收拢等方式,且日益向多块、高收纳比和高集成重载等方向发展。因此,天线阵面快速可靠的自动展开/折叠架设机构成为影响大型地面雷达机动性的关键。
液压系统有力体积比大、集成度高、控制简单等特点,已广泛运用于大中型地面雷达的自动调平和自动架设机构[3,4],撑腿和架设/折叠机构一般成对动作,由此带来了双机构同步问题,因此,液压同步性能直接决定着雷达调平精度、骨架是否发生扭曲变形和运动平顺性。
1 雷达液压同步方法
雷达液压同步控制系统为位置液压同步控制系统,无论是油缸还是马达,实质上是如何保证两个执行元件的流量相同,并不受负载影响。目前雷达常用的液压同步方法大体上可分为三类:机械同步、液压强制同步和电比例伺服闭环同步。
机械同步在液压系统中没有同步元器件,是靠天线骨架较好的刚度进行同步。液压强制同步在液压系统中有同步元器件,同步元器件可以是分集流阀或同步马达,也可是两个相同排量的泵给两路供油实现两个回路同步。电比例伺服闭环同步一般由位置传感器、比例阀和伺服控制器组成,通过采集位置传感器信号,由伺服系统比例控制器实时控制比例阀输出流量以实现位置闭环同步控制。
机械同步和液压强制同步均为开式控制方法,同步性能一般,但成本低、控制简单、应用较为广泛;由于加入了监测传感器,电比例伺服闭环同步的精度较高,但成本较高,控制也较复杂。
2 调平系统同步
雷达液压自动调平一般采用四点调平的方式,调平采用多点追高的方法,即所有的调平腿都遵循只升不降的原则参与调平。平台调平的过程为:首先,四条调平腿伸出并进行落地检测,保证四条撑腿都着地,避免出现支撑腿虚地的情况;其次,根据水平传感器X 轴和Y 轴的信息寻找最高点,保持最高点不动,按一定的控制算法控制其他最低点向最高点趋近,直到满足调平精度。
由此可见,雷达液压自动调平过程中,关键在于双撑腿在承载不均匀的情况下需具有较好的同步性,理论上可采用电比例伺服闭环同步和液压强制同步。考虑撑腿上不易集成布置位置传感器和成本较高,目前雷达液压撑腿同步常采用液压强制同步方式。其中,分流阀的精度和负载敏感性较差,经过实践验证,无法满足现在重载雷达的液压调平系统要求,作为分流阀升级换代产品,液压同步马达同步精度更精确(液压同步马达1~2%,分流阀3~4%),效率更高,可实现3′的调平要求。
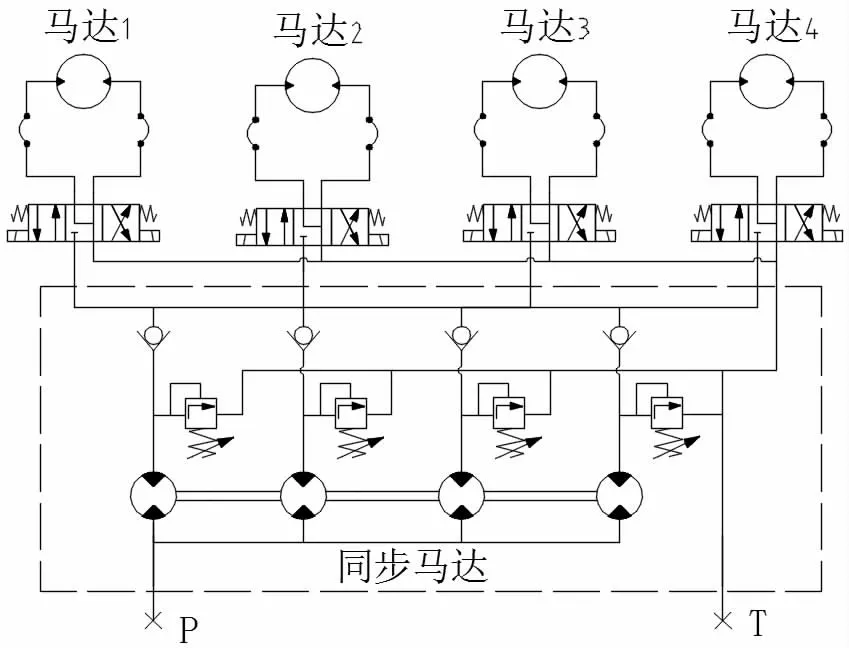
图1 调平系统液压同步原理图
如图1 所示,整个元件有一个共同的进油通道和各自独立的出油口,分流马达对流入其进油通道的液压油起分配作用,分流马达每片的尺寸相同,则进油口的一路高压油将被分流马达等量分流,实现调平撑腿的同步运行,由于几片分流马达为一根轴联动,因此每片马达的出口流量不受负载影响,同时,每片分流马达并联一个溢流阀对每一路进行安全保护。比如调平腿1 和调平腿2 需要同步工作时,其对应的换向阀打开即可实现两腿的同步动作。
3 刚性骨架同步
如图2 所示,为典型的分块平面阵列天线折叠/展开机构,中心框架作为支撑体,左、右边块阵面分别铰接在中心框架上,油缸的一端与中心框架铰接,另一端与边块阵面铰接,单侧边块阵面的折叠/展开通过多个油缸同步动作实现0°到90°翻转,而且两侧边块阵面一般要求同时折叠/展开到位,因此这里涉及单侧同步和双侧同步两个液压同步。

图2 多块刚性阵面折叠/展开示意图
对于单侧同步,由于这种阵面骨架多采用高强度钢焊接成框架结构,刚强度较好,通常采用同步马达同步或机械同步即可满足要求。同步马达的控制方法与调平腿类似,其油缸的同步位置精度能达到2%以内,可以满足大部分此类型阵面的同步精度要求;对于机械同步方式,由于液压系统没有强制同步措施,需保证双缸的油腔互通,即油腔压力相等,这也就要求阵面重心在最两侧油缸的中间几何位置附近,通过骨架本身较高的刚强度实现多个油缸的同步动作。
对于双侧同步,由于两个阵面相对独立,无需考虑对阵面刚性和变形的影响,且一般只要求目视效果能够同时到位即可,因此,同步精度要求不高,根据实际工程经验,同步精度在4%左右即可。可采用分集流阀或同步马达的液压强制同步;或采用限定两个电比例阀开口,实现两路等流量输出的开式控制方式;也可使用同排量的双泵系统分别给两个边块回路供油。
如图3 所示,同步马达同步和机械同步的平衡阀布置方式不同。机械同步由于是一路供油给多个油缸,要求每个缸的压力相同,油缸腔体间必须是管路直接连接,因此采用多缸共用一个平衡阀的方式,即平衡阀进出口连接多个油缸,这种连接方式的平衡阀调试难度较小。而同步马达同步,为有效提高系统的平稳性,每个执行元件需单独布置平衡阀,这种连接方式的平衡阀调试难度较大。

图3 两种同步的平衡阀布置示意图
由以上分析可知,由于同步马达同步有很好的负载不平衡性,对重心位置要求不高,适用范围较广,但调试难度较大。机械同步原理上相对简单,调试难度小,成本也相对较低,但对阵面重心位置和骨架的刚强度有一定要求。
4 柔性骨架同步
如图4 所示,为典型的柔性阵列天线结构形式,主要由展开机构/承力杆和驱动油缸等组成,承力杆安装在展开机构上,由油缸驱动展开机构伸缩,带动多根承力杆实现大收纳比的展开/收拢。柔性阵面结构往往跨距较大,同时承力杆为细长杆,本身的刚性较差,故对同步精度要求较高。根据不同的展开机构结构形式,可采用机械同步或同步马达同步,但结构上需有同步装置;如果精度要求高,则可采用电比例伺服闭环控制实现。

图4 柔性阵面展开示意图

图5 电比例多路阀原理图
如图5 所示,电比例伺服闭环控制的主回路多采用PSL 负载敏感回路电比例多路阀,每片阀输出流量可独立控制且不受负载影响,位置传感器一般与油缸集成或安装在展开机构上,由伺服系统比例控制器实时控制两片阀输出流量以实现位置闭环同步控制,伺服系统只需要通过开关控制进行油缸运行速度的选择即可实现需要的动作。
5 结论
本文首先给出了雷达常用的三种同步方法和优缺点,对调平系统、刚性骨架和柔性骨架适用的液压同步方法进行了详细阐述。这些同步方法在实际使用中效果良好,可满足同步要求,为后续类似结构的液压同步设计提供借鉴,并具有一定的参考意义。
猜你喜欢
模具制造(2022年7期)2022-08-29
汽车零部件(2022年5期)2022-05-30
科学与财富(2021年35期)2021-05-10
作文周刊·小学三年级版(2020年24期)2020-07-17
东坡赤壁诗词(2019年5期)2019-11-14
华东师范大学学报(自然科学版)(2018年3期)2018-05-14
科技创新与品牌(2017年9期)2017-10-20
集装箱化(2016年8期)2016-10-20
棋艺(2016年4期)2016-09-20
当代(2009年3期)2009-05-25