无人机多机协同侦察系统关键技术研究
2021-05-16 10:32易天奇
科学技术创新 2021年13期
易天奇
(武警宜春支队,江西 宜春336000)
无人机之间的配合工作需要通过无人机多机协同侦察系统实现,可以准确地对目标区域进行侦察,获得目标区域的相关情报信息,使侦察人员可以及时了解目标区域的具体情况,为后续工作提供重要依据,进而保障无人机具有良好的应用水平。
1 无人机多机协同侦察系统的构建
1.1 系统界面。系统界面需要由各个功能模块组成,通过控件与窗口的相互配合来实现。窗口主要承担两方面的作用:一方面,用于承载相应的控件,将其嵌入到窗口。另一方面,用于数据展示,显示无人机侦察到的信息[1]。
1.2 操作窗口。无人机的操作需要通过操作窗口实现。通过该窗口可以设置无人机的侦察模式,进而实现相应的侦察功能。以区域监视为例,操作流程如下:首先,需要在侦察模式选项卡中选择区域监视模式,设置侦察目标的相关参数,如区域范围、目标特征等,监视范围通过GPS定位实现,可以准确地确定监视区域。其次,区域监视模式启动后,各个无人机之间将会相互配合在区域进行侦察,对目标进行寻找。每台无人机配有CCD相机,可以生成高分辨率的彩色图像,将其与事先输入目标特征进行对比,进而确定目标的位置。最后,目标位置确定后,可以通过窗口查看目标位置,并且采取相应的措施。
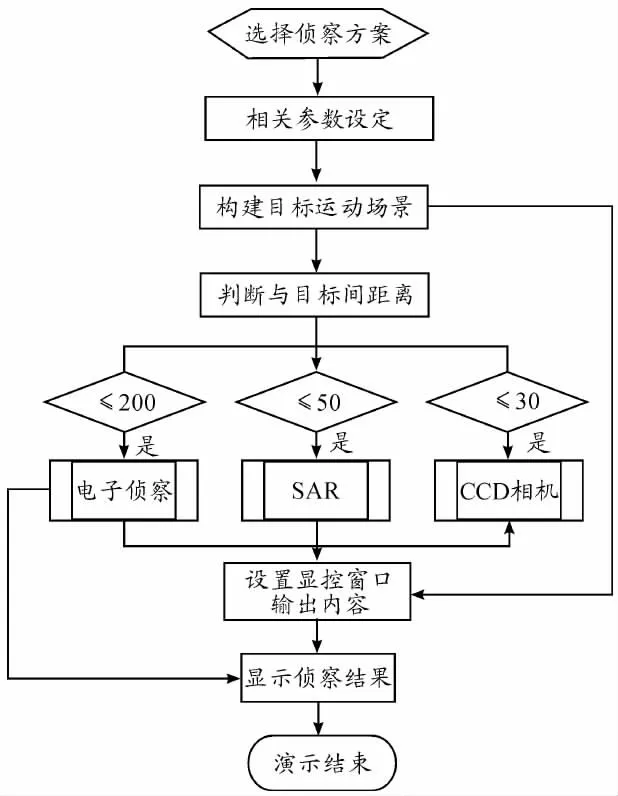
图1 侦察流程
1.3 侦察流程。无人机多机协同侦察流程可以根据图1 所示的流程图来实现。下面将对侦察流程进行分析:首先,需要选择侦察方案,进行相关参数的设定,为目标侦察做好准备工作,完成目标场景信息的构建。其次,需要实现无人机的侦察功能,在目标区域寻找目标。侦察目标采用三种方式进行综合判断,分别为电子侦察、合成孔径雷达(SAR)、CCD 相机。只要其中一种侦察方式捕获到目标,便说明找到目标。例如:当电子侦察检测与目标的距离不大于200m或SAR 检测与目标距离不大于50m 或CCD 检测到与目标距离不大于30m时,视为发现目标。最后,无人机找到目标后,会通过窗口对侦察结果进行显示,供侦察人员对目标信息进行分析。
1.4 控制算法。控制算法的实现需要以模型为基础,无人机多机协同侦察模型如下:第一,无人机侦测区域设置为圆形区域。第二,目标位于无人机探测区域内即为捕获目标。通过上述方法可以有效地对无人机多机协同侦察模型进行简化,便于无人机多机协同控制算法的实现。无人机多机协同侦察算法模型[2]如下:
目标函数:

2 无人机多机协同侦察系统关键技术分析
2.1 协同任务分配技术。无人机侦察过程中,往往侦察目标的数量不止一个,这时便需要采取协同任务分配技术,无人机侦察任务进行有效地分配,保障多机协同侦察方式能够顺利实现。通常情况下,侦察目标的分布具有不确定性,再加上无人机的数量有限,为了对无人机资源进行最大化地利用,同时提高无人机侦察效率,需要注意任务分配的协调性,让各个无人机能够密切配合,使执行侦察功能的无人机能够形成一个整体。
无人机协同运动模型如下:

无人机多级协同侦察过程可以通过受限模型实现。受限模型如下:

其中,无人机协同运动模型可以作为目标函数,受限模型可以作为约束条件,这样便可以对协同任务进行有效地分配,避免各个无人机的任务发生冲突。
2.2 感知智能决策技术。感知智能决策技术可以提高无人机多机协同侦察的自动化水平,使其能够在复杂的环境下进行侦察作业,防止无人机受到环境因素的影响而发生损坏。感知智能决策基本判断条件如下:
决策类别状态:
ωi, i =1,..., c
决策采取概率:

通过对决策概率的设定,可以让无人机执行相应的决策。感知智能决策技术在无人机中的应用主要包含两个方面:一方面,提高无人机的感知能力,一般通过数字化感知技术来实现,可以有效地对无人机周边环境进行检测,对危险环境产生预警,从而进行有效地回避,避免无人机受到损伤。另一方面,提高无人机的决策能力,使其能够自动躲避危险、障碍物等,即使在无人控制的情况下也能正常工作,并且保证不会发生坠机事件。通过感知智能决策技术可以让无人机更好地应对突发状况,使无人机在失去人为控制的情况下仍然能够继续工作,从而保障多级协同侦察即使在恶劣的环境下也能够实现。
2.3 数据处理评估技术。无人机多机协同侦察过程中将会形成大量的侦察数据,而在这些数据中只有一小部分信息是有效的,对有效信息进行筛选非常重要。对数据进行筛选之前,首先需要解决数据的存储问题,并且将侦察数据准确、全面地进行存储。侦察数据通常存储在无人机多机协同侦察系统的专有数据库中,并且根据侦察数据的类型进行科学地分类,这样既可以使信息存储结构更加地规范化和系统化,又能够提高侦察信息的检索效率,可以快速地检索到需要的侦察信息。在有效数据筛选方面,需要根据检索类型在数据库中找到相应的分类,再从分类中进一步进行筛选。当检索到所需信息后,需要对侦察信息进行评估,判断信息是否有效,进而提高数据处理的准确性和快速性[3]。侦察数据可以采用PTVDDBN模型进行存储,模型变量由X[t],θ(t),G[t]组成,三者之间具有如下关系:

其中,X[t]为节点,用于存储侦察数据。
2.4 多源信息融合技术。通过多源信息融合技术是整合无人机侦察信息的重要方式,主要用于提高时间与空间的匹配程度,即保证多机协同侦察数据的实时传输效果,避免出现时间与空间出现不匹配的问题,从而对目标进行有效识别和精准定位,提高无人机采样信息的准确性和可靠性。无人机上载有多种传感设备,如CCD、SAR、多光谱等。以CCD相机为例,分辨率最高可达到38 万以上,读出速度可以达到500fps 以上。这样才能有效地对空间环境进行分析,而传感设备信息的捕获效率将决定着时间与空间的匹配程度。例如:CCD相机捕获目标的精度非常重要,一旦超出精度范围,将会导致图像时间与空间不匹配,使得无人机侦察到的图像与当前时刻相差过大,进而导致侦察信息失去时效性。因此,对无人机多源信息进行融合非常重要,这样可以有效地对目标进行识别,提高目标监测的精度。
2.5 互联互通交互技术。互联互通交互技术可以保障无人机之间的侦察数据能够实时共享,对侦察信息进行有效地管理。无人机的种类较多,如图像侦察无人机、电子侦察无人机等,不同类型无人机之间相互配合可以有效地提高侦察效率,保障无人机侦察工作能够顺利完成。无人机多机协同需要通过通信技术来实现,无人机之间需要频繁地进行数据交互,将环境数据进行实时共享。无人机协同侦察过程如图2 所示,各个无人机将侦察到的信息传递给情报处理中心,对侦察信息统一进行收集。再将处理好信息向其它无人机进行传递,这样便实现了侦察信息在无人机之间的互联互通,将侦察信息对各个无人机进行共享,从而有效地解决了多机协同侦察的信息共享问题。

图2 无人机协同侦察
2.6 数据快速分发技术。数据快速分发技术主要用于解决无人机多机协同侦察的时效性问题,使侦察信息能够快速地传递,满足无人机侦察对实时性的要求。数据快速分发技术在多机协同侦察中的应用主要包含两个方面:
一方面,需要采取最短路径的方式进行数据分发,保障数据能够快速地在无人机之间进行传递,使无人机之间能够形成侦察网,对侦察环境进行全方位的覆盖。最短路径可以采用Floyd-Warshall算法来实现,使一种动态规划算法。以三点的最短路径为例,设三点为i、j、k,其中k 为媒介节点,则最短路径表示如下:
dist[k](i,j)=min{dist[k-1](i,j),dist[k-1](i,k)+dist[k-1](k,j)}
另一方面,需要结合网络通信技术,在协议层进行侦察数据的分发,以广播的形式将数据传递给各个无人机。这样网络中的各个节点便会接受和转发大量的数据信息,接着,对网络节点进行合理地分配,进而缩短信息的传递时间,将侦察数据进行快速地分发。
综上所述,多机协同侦察系统被广泛应用于无人机侦察中,可以有效地提高无人机的覆盖侦察面积,保障侦察数据具有良好的准确性。无人机多机协同侦察系统涉及到了信息、通信、控制等多方面的技术,在多种技术相互配合下才得以实现,使得无人机多机协同系统的构成极为复杂。因此,为了保障无人技术能够更好地发展,提高相关技术的研究非常重要。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
新班主任(2022年4期)2022-04-27
今日农业(2021年9期)2021-11-26
发明与创新·小学生(2021年3期)2021-03-25
汽车观察(2019年2期)2019-03-15
决策(2018年8期)2018-12-10
决策(2018年11期)2018-11-28
决策(2018年10期)2018-11-07
小天使·四年级语数英综合(2018年1期)2018-07-04
民生周刊(2017年19期)2017-10-25