
GMSK信号的同步及相干解调算法
2021-05-08 09:08:04陈丽婷顾圣明陈建斌
无线电工程 2021年5期
陈丽婷,康 超,顾圣明,陈建斌
(上海航天电子技术研究所,上海 201109)
0 引言
高斯最小频移键控(Gaussian Filtered Minimum Shift Keying,GMSK)是调制指数为1/2,频率脉冲响应为GMSK脉冲的连续相位调制(Continue Phase Modulation,CPM)。GMSK包络恒定、相位连续,使得其带外辐射功率小、谱密度集中,并且由于其相位具有记忆性,使得其具有一定的纠错能力。因此,GMSK具有较高的频带利用率、功率利用率,适合在无线通信信道传输[1-4]。在频带资源有限的数字通信领域,GMSK得到广泛的应用,如全球移动通信系统(GSM)、遥测靶场系统、航空数据链以及空间数据传输等。
GMSK的解调算法有非相干解调和相干解调。非相干解调不需要恢复相位,算法简单,易于实现,但灵敏度损失较大。GMSK的最佳解调算法是最大似然序列检测(Maximum Likelihood Sequence Estimation,MLSE)算法,使用MLSE解调算法的关键是载波相位同步以及符号定时[5-7]。文献[8]基于最大似然算法对载波相位和符号定时进行了联合估计,运算比较复杂;文献[9]对接收采样数据进行FFT运算后进行载波频偏和符号定时的联合估计,运算量与最大似然算法相比有所下降,但运算量仍较大,并且该算法需要有训练序列,增加了系统开销。
本文采用了通用数字环+符号定时+维特比译码实现GMSK的相干解调。通用数字环是一种低计算量和适合数字化处理的锁相环路,在此基础上提出一种改进算法以提高环路的性能;提出的一种符号定时的新算法实现GMSK信号的位同步,该算法基于GMSK信号波形特点,算法简单,易于实现;采用基于最大似然原理的维特比算法实现GMSK解调,并提出简化算法。
1 GMSK信号特性分析
GMSK信号可以表示为:
(1)
式中,Es为码元能量;T为码元周期;f0为载波频率;φ0为初始相位;φ(t,α)为相位信息,可表示为:
(2)
式中,α={αk},表示二进制的发送码元序列,取值范围为{+1,-1};调制指数h=1/2;脉冲相位函数q(t)是一个连续单调函数,可以由频率脉冲响应g(t)的积分来表示,即:

(3)
-∞≤t≤∞,
(4)
(5)
式中,Bb为预调制高斯滤波器3 dB带宽。BbT值越小,高斯脉冲响应时间越长,波形越平滑,信号功率谱旁瓣衰减的越迅速,但码间干扰也越严重。当BbT值趋近于无穷大时,GMSK信号成为MSK信号。
由于g(t)的区间为-∞≤t≤∞,在工程上不容易实现,因此可以将之截短为:
(5)
对于GMSK信号,不同BbT值的g(t)波形在各个码元周期T内的面积如表1所示。从表中可以看出,g(t)的波形主要集中在(-2.5T~2.5T)中,因此,在工程实际应用中,可以将g(t)截短为5T的宽度,即N=2。

表1 不同BbT值的g(t)波形在各个T宽度内面积
不同BbT值下GMSK信号的功率谱能量分布如表2所示。由表2可以看出,BbT值越小,谱密度越集中,频带利用率越高。

表2 不同BbT值的GMSK能量分布
使用MATLAB SIMULINK的GMSK Demodulate Baseband 模块仿真得出基于MLSE相干解调的误码率,由于该模块具有较好的性能,因此把该误码率作为理论误码率,作为与工程实现性能对比的依据。不同BbT值下GMSK信号的误码率曲线如图1所示,可以看出,BbT值越大,解调性能越好。综合考虑功率利用率和频带利用率,在实际工程应用中,选择BbT=0.25。
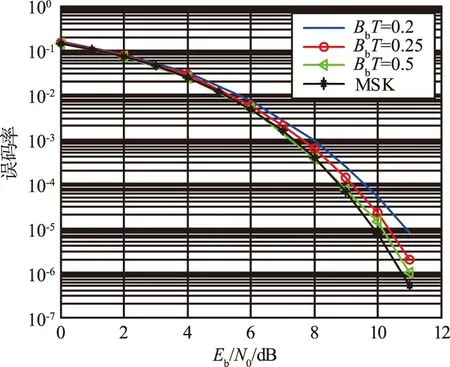
图1 不同BbT值的GMSK的误码率曲线Fig.1 GMSK error rate curves of different BbT values
2 GMSK相干解调系统
2.1 载波同步环路
GMSK接收机的相干解调不仅要补偿频偏,还要恢复载波相位。文献[10]分别仿真了判决反馈环和通用数字环对GMSK信号相位跟踪的S曲线,结果表明在特定BbT范围,判决反馈环和通用数字环均能够恢复GMSK信号的载波相位。其中,通用数字环的BbT适用范围0.15~0.4,大于判决反馈环的适用范围(0.15~0.3),鉴相灵敏度也大大高于判决反馈环。本文采用通用数字环,其原理框图如图2所示。

图2 通用数字环原理Fig.2 Block diagram of universal digital loop
环路滤波器输入端的误差信号为:
F(t,θ)=sgn[sinφ]×sgn[cosφ]×
sgn[sinφ+cosφ]×[sinφ-cosφ]。
(7)
环路滤波器的选择在很大程度上决定了环路的捕获性能、跟踪性能以及抗噪性能,对于相干解调来说,相位噪声对解调性能有很大的影响。本文采用的是一阶环路滤波器,其原理框图如图3所示。
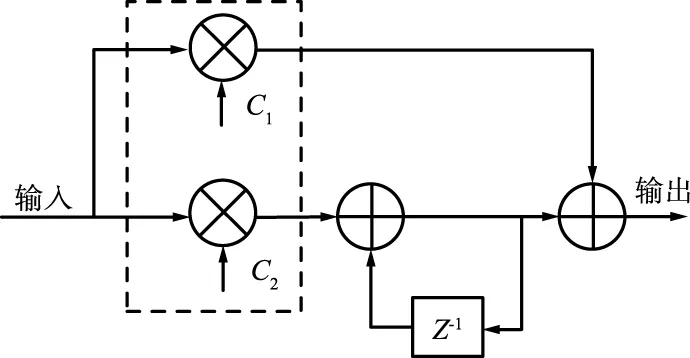
图3 一阶环路滤波器原理Fig.3 Block diagram of first order loop filter
系统传输函数为:
(8)
(9)

图2虚线框中乘法器的输入为+1或者-1,因此可用异或逻辑代替虚线框中的乘法器;图3一阶环路滤波器的输入为+1或者-1,因此可用加法器来替代虚线框中的乘法器,使其资源更加优化。由上述可知,本文使用的通用数字环结构简单,鉴相器及环路滤波器在实现过程中只需要若干个加法器,计算量低,适合数字处理。
在误码率为9.4×10-5时,相干解调理论的Eb/N0=9.2 dB,因此在载波环路仿真时,令AWGN信道的噪声值Eb/N0=9 dB。载波环路跟踪曲线如图4所示,可以看出,当BL=0.01Rb,载波频偏为50 kHz时,捕获时间约为0.069 s,相位波动小;当BL=0.01Rb,载波频偏为100 kHz时,载波环路无法收敛;当BL=0.05Rb,载波频偏为100 kHz时,捕获时间约为0.002 s,相位波动大。为了使环路具有较快的捕获速度、较大的捕获范围,以及较小的相位波动,采用环路参数切换策略,在捕获阶段令BL=0.05Rb,在跟踪阶段令BL=0.01Rb,频偏为100 kHz的载波环路跟踪曲线如图5所示。

图4 载波环路跟踪曲线Fig.4 Tracking curve of carrier loop

图5 改进后的载波环路跟踪曲线Fig.5 Tracking curve of improved carrier loop
可以看出,捕获时间为0.002 s,相位波动小。在最大的多普勒捕获范围内,均可以采用此种载波环路跟踪策略。
2.2 一种新的符号定时算法
在AWGN信道下,GMSK接收机接收信号可以表示为:
r(t)=s(t,α)+n(t),
(10)
式中,s(t,α)为发送信号;n(t)为高斯白噪声。假设经过载波环路之后,接收信号的频率与相位均已恢复,则可得到基带数据I路和Q路:

(11)
GMSK信号是连续相位调制信号的一种,其调制信息包含在相位信息φ(t,α)里,即:
(12)
BbT=0.25的GMSK相位轨迹,如图6所示。

图6 BbT=0.25的GMSK相位轨迹Fig.6 GMSK phase of BbT=0.25


图7 [0,2π]内cosθ与sinθ的波形Fig.7 Waveform graph of cosθ and sinθ within [0,2π]
本文基于GMSK基带信号波形的这个特性,提出一种符号定时的新算法。综合观测图6和图7可以得出:
① 码元周期的起始时刻是I(t)和Q(t)的极值点或者过零点。
② 为了增加该算法的抗干扰性,选择合适的时间进行统计,选取概率最大的时刻作为码元周期的起始时刻。
令AWGN信道的噪声值Eb/N0=9 dB,每个码元采样点数为5,表3给出了在不同统计时间下本文提出的符号定时算法的判决概率。从表3可以看出,随着统计时间的增加,定时精确度越高,在工程实现中,根据对定时速度以及精确度的实际要求,选择合适的统计时间。
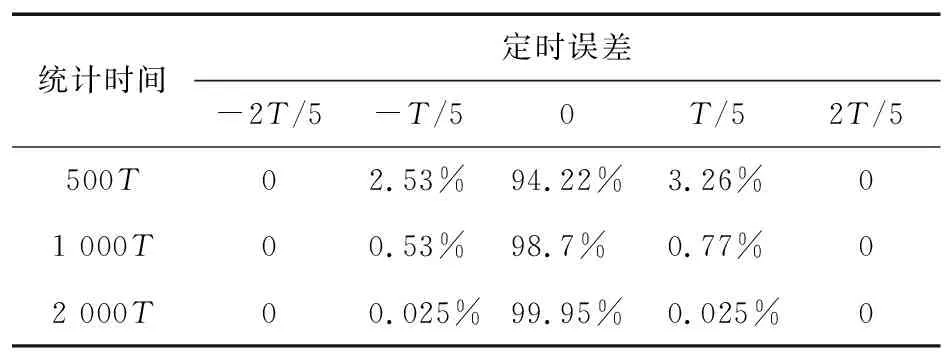
表3 符号定时算法判决概率
文献[11-12]中的GMSK符号定时算法采用联合相位定时恢复算法和联合频偏定时估计算法,具有较好的定时性能,但均需要使用大量的乘法器。本文提出的符号定时算法复杂度低,在工程实现中不需要使用乘法器,运算量少,占用的硬件资源极小,在资源受限的工程应用环境中,具有明显的优势。
2.3 基于MLSE的维特比解调
GMSK信号的相位具有记忆性,其最佳解调算法是MLSE算法。MLSE是基于最大似然原理,在接收端假设所有可能的发送序列,计算它们与接收信号的相关性,从而完成符号序列的整体判决[13-14]。
假设信道为AWGN信道,MLSE将会选择与接收信号r(t)具有最小欧式距离的信号s(t,α)所对应的符号序列α作为判决输出,即:

(13)
由于GMSK为恒包络信号,式(13)的最小化等价于最大化相关,即:

(14)
式(14)右边可以用维特比检测算法递归计算得到,即:
(15)
在工程实现时选择FIR滤波器实现匹配模块,与128个本地参考波形进行匹配滤波,将本地参考波形的数值作为FIR滤波器的系数,每个本地参考波形采用一个FIR滤波器实现,因此该匹配过程需要128个FIR滤波器,对硬件资源需求大。本文根据I(t)和Q(t)波形特性,提出了简化算法。


图8 维特比匹配滤波器模板Fig.8 Matched filter pattern of Viterbi
3 工程实现
基于FPGA XC7K160T平台,实现GMSK相干解调算法,包括载波同步,符号定时以及基于MLSE的维特比解调。
输入信号以及算法参数:
① GMSK信号,BbT=0.25,码速率Rb=10 Mb/s;
② 载波环参数:捕获阶段BL=0.05Rb,跟踪阶段BL=0.01Rb;
③ 符号定时统计时间:1 000T;
④ 维特比观测长度:5T。
工程测试框图如图9所示,包括RS SMW200A信号源、FPGA XC7K160T平台和误码率显示计算机。实际的硬件设计和验证平台如图10所示。
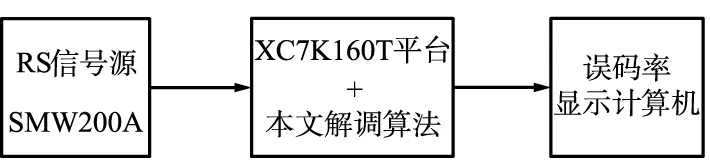
图9 GMSK工程测试框图Fig.9 Block diagram of GMSK engineering test

图10 硬件设计和验证平台Fig.10 Hardware design and verification platform
图11给出了该解调系统在图10硬件平台下的误码率实测曲线以及理论的最佳解调误码率曲线,其中输入信号BbT=0.25,码速率Rb=10 Mb/s。从图中可以看出,当Eb/N0≥8 dB时,本文算法的误码率曲线与理论值趋于一致,在误码率为9.4×10-5(系统链路环境使用要求)时,本文算法灵敏度为9.5 dB,比理论值9.2 dB仅恶化了0.3 dB,解调损耗小,性能优良。

图11 GMSK(BbT=0.25)误码率曲线Fig.11 Error rate curve of GMSK(BbT=0.25)
4 结束语
使用MLSE解调算法的关键是载波相位同步以及符号定时,本文采用通用数字环进行载波相位的同步,环路参数影响载波频率的捕获范围、锁定时间以及相位误差,通过环路参数的切换在这三者中取得最优的平衡,以提高环路的性能。仿真结果表明,本文提出的改进算法使得环路具有更大的捕获范围,更快的捕获速度以及更小的相位波动。GMSK的相位调制特性决定了其I路与Q路信号在码元周期内具有单调性的特征,本文基于该波形特点提出了一种符号定时的新算法,仿真结果表明,该算法复杂度低,运算量少,易于工程实现,定时精度符合相干解调的要求。由于GMSK的码间干扰特性,本文采用维特比算法来实现最大似然解调,并提出简化算法,使得占用的FIR资源减小为原来的1/4。工程实现表明,基于本文算法的GMSK相干解调系统误码率性能仅比理论值恶化0.3 dB,性能优良。
猜你喜欢
雷达与对抗(2022年1期)2022-03-31 05:18:20
雷达与对抗(2020年2期)2020-12-25 02:09:26
上海公路(2018年4期)2018-03-21 05:57:46
无线电通信技术(2016年6期)2016-12-20 03:08:13
电测与仪表(2014年8期)2014-04-04 09:19:36
单片机与嵌入式系统应用(2014年7期)2014-03-24 19:12:05
现代防御技术(2014年6期)2014-02-28 18:26:27
铁路通信信号工程技术(2014年6期)2014-02-28 16:58:50
铁路通信信号工程技术(2014年3期)2014-02-28 16:56:24
河北大学学报(自然科学版)(2013年4期)2013-10-28 07:05:39
