
自由液面对潜艇伴流场影响的试验分析
2021-05-08 01:29郭春雨韩康韩阳王超李鹏
哈尔滨工程大学学报 2021年4期
郭春雨,韩康,韩阳,王超,李鹏
(哈尔滨工程大学 船舶工程学院,黑龙江 哈尔滨150001)
潜艇因作战任务、补给、人员轮换以及靠港等需求需在浅海处进行活动,此时自由液面的兴波会增加潜艇的航行阻力,改变螺旋桨工作的流场环境,降低螺旋桨的推进性能。研究自由液面对潜艇伴流场的影响有助优化潜艇螺旋桨,提升潜艇的推进性能和操纵性能。
国内外学者就自由液面对潜艇伴流场的影响进行了大量试验研究和数值仿真研究。Wilson-Haffenden等[1]和Shariati等[2]对潜艇Sub-off模型在不同航速、不同潜深下的阻力特性分别进行了试验研究和数值模拟。Liu等[3]通过CFD方法模拟不同几何参数的潜艇在近自由液面航行的情况,发现潜艇的波谱因其几何参数变化和航行速度变化会出现不同的波谱密度峰值。Dawson[4]总结梳理了有关潜深、航行速度以及艇体细长比对潜艇伴流场影响的研究;文献[5-6]运用商用流体仿真软件分析自由液面对潜艇阻力性能的影响,发现艇艏肩部波峰和艇艉肩部波谷之间的相互干扰、耦合是艇体阻力发生“驼峰”变化的主要原因。
自由液面会对潜艇的阻力、流场、兴波等多方面产生负面影响,但有关自由液面对潜艇伴流场影响的试验研究仍比较缺乏。本文采用粒子图像测速(particle image velocimetry,PIV)技术对不同潜深条件下,艇体的伴流场进行测量,总结分析伴流场的速度、湍动能以及雷诺应力等湍流特征,进而总结得出自由液面与伴流场的耦合作用及其流动特征。
1 潜艇伴流场测量试验
本次试验是在哈尔滨工程大学拖曳水池实验室完成的,水池主尺度为108 m×7 m×3.5 m;拖车稳速范围为0.1~6.5 m/s[7-8]。试验中应用的体视粒子图像测速(stereoscopic partical image velocimetry,SPIV)测量系统由1个可完全浸没于水下的雷体、流线型翼型支架、激光系统、控制与采集系统和粒子播撒系统等装置组成。SPIV系统的标定是在拖曳水池中通过1个400 mm×300 mm的多层级点阵式标定靶完成的,多层级点阵式标定靶避免了单层级标定靶在标定时会移动的影响。示踪粒子的播撒是SPIV流场测量的重要环节,试验中应用的示踪粒子为白色聚酰胺粒子,粒子的播撒采用自主研发的播撒装置[9],该装置具有播撒深度可调、粒子播撒范围广等特点。
本次试验采用自主设计并制作的固定装置,固定装置分2部分,固定支架和二级调潜深钢板,二者之间通过凹型连接件连接。固定支架通过自身紧固装置连接至拖车“鹊桥”。通过二级调潜深钢板和“鹊桥”的相互配合,可以实现潜艇模型0~1.0 m的无级潜深调节。固定直板采用厚度为20 mm高强度钢材,放置距离潜艇模型螺旋桨盘面1.5 m处位置,以减小对潜艇伴流场的影响。
PIV系统测量流场信息是通过电荷耦合元件(charge coupled device,CCD)相机在极短时间间隔内拍摄示踪粒子图片并基于图像识别算法识别示踪粒子的位移变化得出流场瞬时速度来实现的,测量过程由数据采集和数据处理2部分组成。
在PIV系统的测量过程中,采集得到n组瞬态速度分量u、v、w;全场速度大小L、测量截面速度大小S、截面的平均动能EA和瞬态动能EI分别为[10]:
(1)
L=(u2+v2+w2)1/2
(2)
S=(v2+w2)1/2
(3)
EA=1/2(uu+vv+ww)
(4)
EI=1/2(unun+vnvn+wnwn)
(5)
式中i=1,2,3分别表示测量得到的轴向、展向和垂向速度分量。

(6)
(7)
(8)
(9)

本文选用的模型是美国泰勒水池设计的Sub-off模型[11],试验采用的模型总长1 m,最大直径D为0.116 m,最大高度0.168 m,伴流场测量剖面为潜艇艉部0.978处。为方便后续试验研究,将艇体分成3段进行三维建模并通过3D打印技术制作3段艇体(打印误差0.5 mm,可以忽略),艇体之间通过艉撑杆及内部带孔圆片进行连接,艇体表面需光顺处理并对切面进行激光涂漆处理以满足PIV试验需要,数值模型与实物模型如图1所示。由于本次试验采用的潜艇模型缩尺比较大,故在艇体艏部L/20处加装激流装置以加快艇体表面的层流转淚,本文选用了文献[3]所述激流装置,将模型与本文SPIV测试系统进行整体装配,最终模型安装效果如图2所示。

图1 潜艇模型Fig.1 Sub-off model
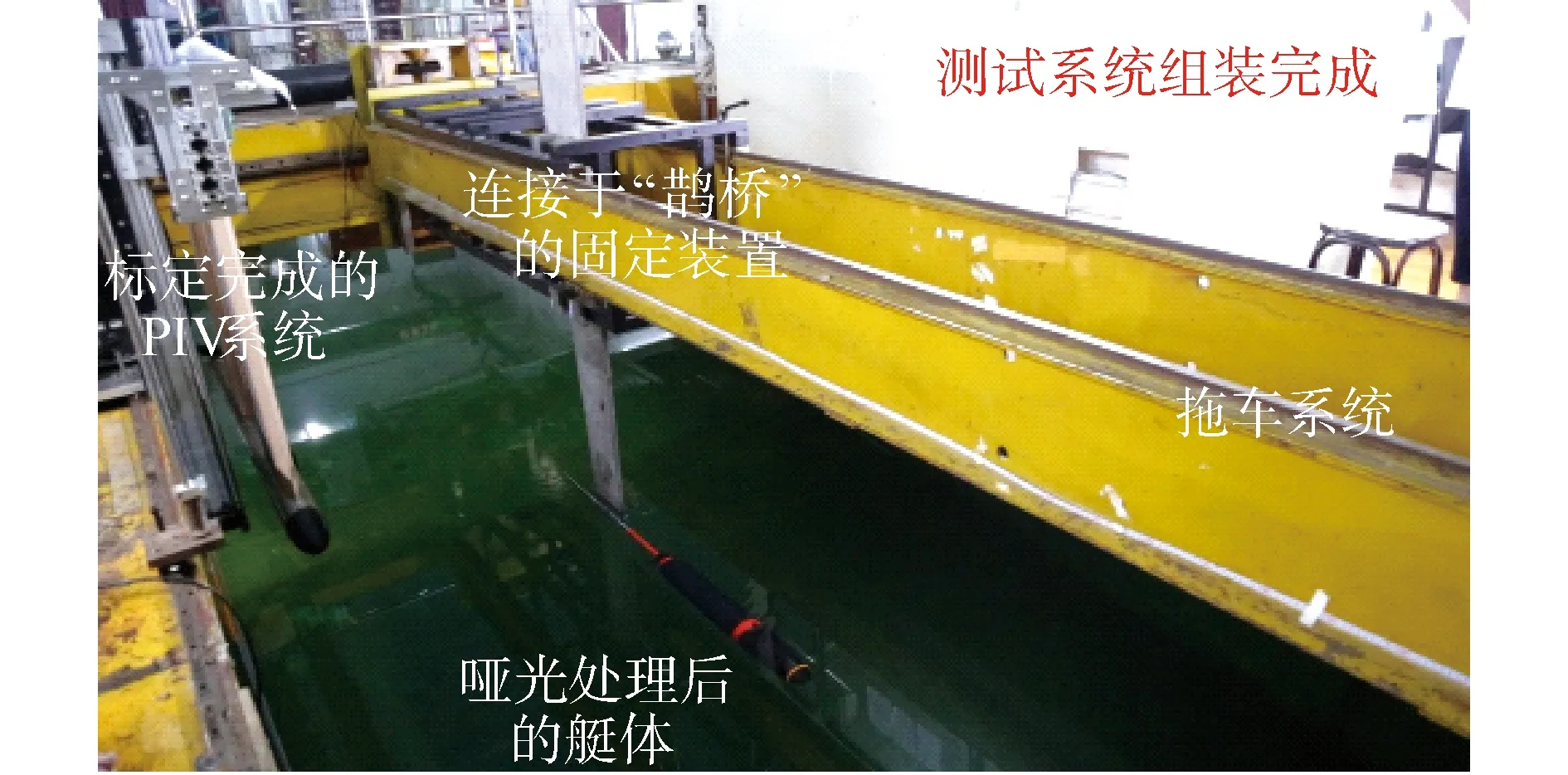
图2 完整测试系统实物Fig.2 Picture of the whole test system
为了系统地分析自由液面对潜艇伴流场的影响,本次试验进行了多个潜深及多个航速下的伴流场测量:潜深工况有4个,潜深H分别为1.5D、2.5D、3.5D和4D;航速工况有3个,Fr分别为0.3、0.5和0.7。
2 伴流场测量误差分析
本文提及测试系统与拖车“刚性”连接,此时,拖车速度为流场轴向速度“真值”,流场的展向、垂向速度为0,故有必要对拖车的稳速精度进行界定。根据拖车的安装使用说明可知:拖车给定精度0.1%,稳速精度0.1%,表现精度±1 mm/s,满足SPIV流场试验的要求。
以拖车速度U=1.15为测量精度的“真值”,此时PIV系统测得对应截面的速度 应为:u/U=1,v/U=0,w/U=0。通过SPIV无艇体流场测试,获得艇体伴流场的平均速度分布、脉动速度分布、湍流强度及平均动能如图3~6所示。图3给出了测量截面三向无量纲平均速度云图信息,可以看出各分量相对拖车速度的测量误差整体小于5%,轴向速度和垂向速度的误差在2.5%以下,而展向速度偏差相对较大,在测量平面的上半部分,误差约为5%,与试验时拖车的轻微振动和试验水质有关;图4是三向脉动速度分布,脉动速度的分布受水中杂质、系统算法等因素的影响会产生相对较大的误差,图中信息表明,其总体误差在5%以内,测量精度可以接受;图5表明流场整体湍流强度绝大部分区域的在2.0%以内,结合脉动速度分布可知,SPIV测试系统具有良好的测量稳定性与测量精度;图6是测量截面流场的平均动能分布,整体平均动能范围为0.5~0.52,和实际值吻合良好。综上可以得出SPIV测量系统的测量精度在可接受范围内。

图4 伴流场脉动速度分布Fig.4 Root mean square velocity field in pro-plane
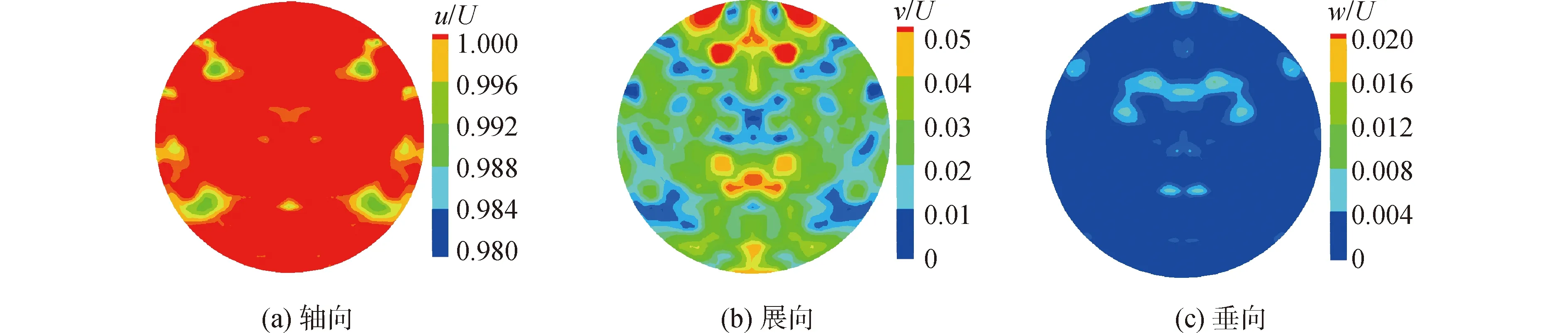
图3 伴流场平均速度分布Fig.3 Time-averaged velocity field in pro-plane
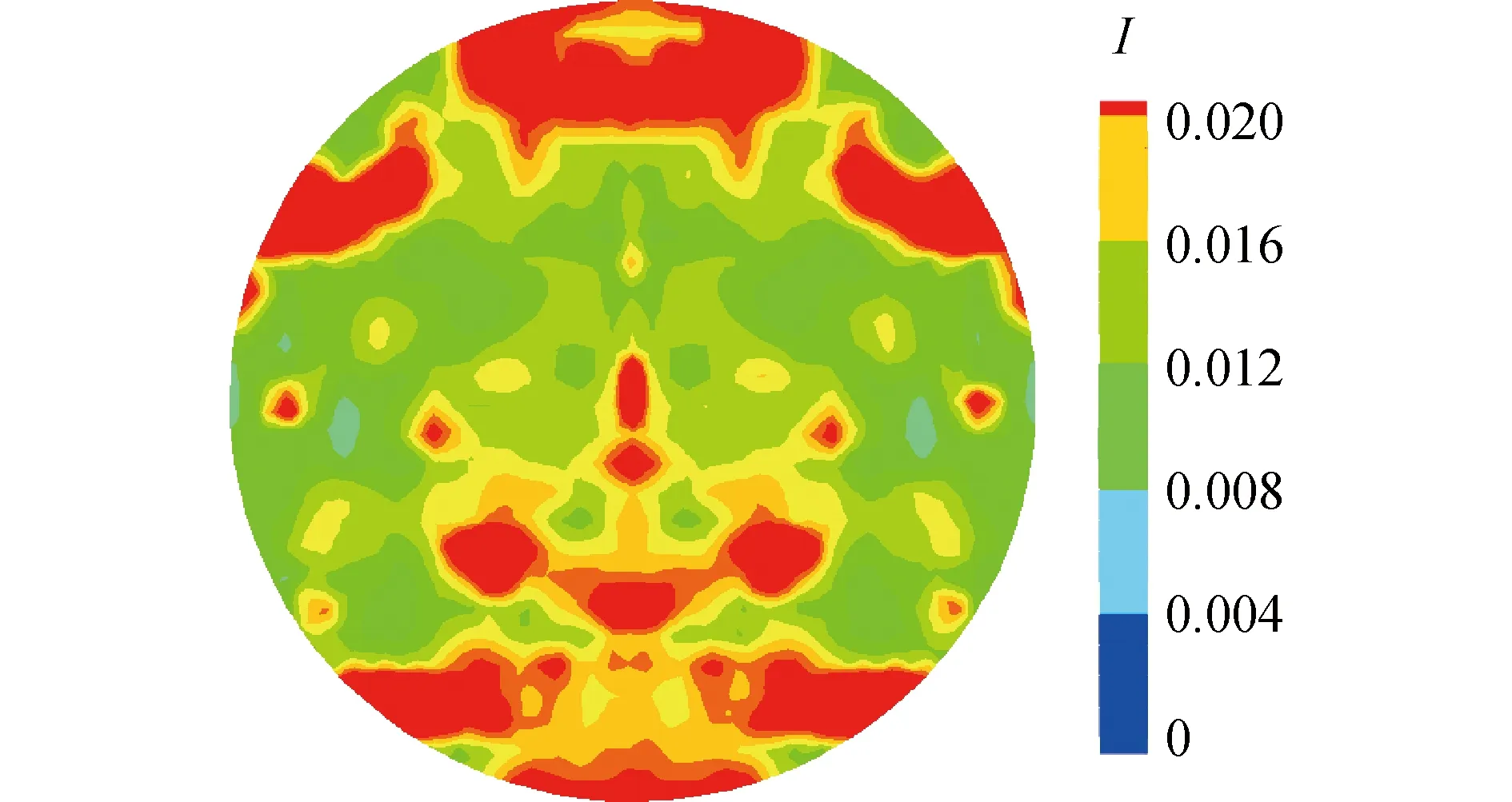
图5 伴流场湍流强度分布Fig.5 Turbulence intensity in pro-plane

图6 伴流场平均动能分布Fig.6 Average kinetic energy in pro-plane
3 潜艇伴流场测量试验结果
3.1 无自由液面影响的艇体伴流场
为探究自由液面对艇体伴流场的影响,对无限潜深条件下的伴流场进行PIV测试。潜艇潜深大于3D时,自由液面对潜艇水动力的影响十分微弱,潜深大于4D时,自由液面对其水动力的影响可忽略不计[1]。结合试验条件及文献[1]研究结果,本实验采用4D潜深为潜艇的无限潜深条件,进行不同航速下的PIV测试。图7和图8为不同航速下伴流场的轴向速度云图,半径约为艇体最大直径,图中空白中心数据因激光在结构物表面反射实效,故将试验数据删除,后续的试验结果中均以此为基准。可以看出:在无限潜深条件下,轴向速度和脉动速度在外半径区域变化较大,内半径区域无明显变化,图7中轴向速度等值线在圆圈包围区域发生了双峰凹陷,且在不同的Fr下,结合图8伴流场脉动速度在双峰凹陷处未出现大的波动,即双峰未出现变化,而在云图下方未对应地出现相同的双峰凹陷,这是因为潜艇上游指挥台围壳处的马蹄涡随潜艇运动融合流入伴流场[12]。由此可以看出,在无限潜深的条件下,自由液面对伴流场影响微乎其微,与文献[1]研究结果一致。
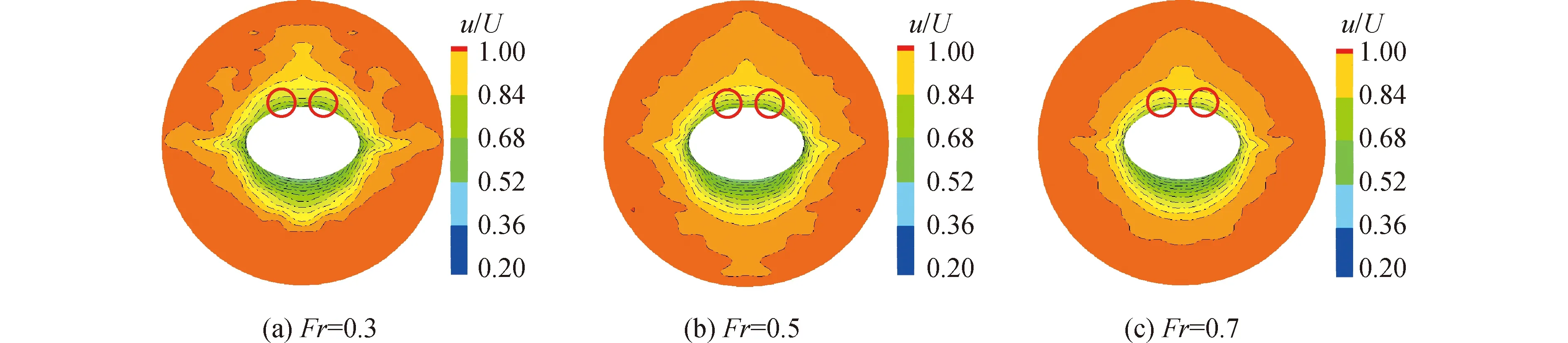
图7 无限潜深不同航速潜艇伴流场轴向速度Fig.7 Time averaged axial velocity field in pro-plane under 4D submergence-depth

图8 无限潜深不同航速潜艇伴流场轴向脉动速度Fig.8 Root mean square velocity field in pro-plane under 4D submergence-depth
3.2 有自由液面影响的艇体伴流场
在不同潜深、不同航速条件下,结合线性波理论,自由表面的兴波会因波峰和波谷的变化对潜艇阻力形成不同的影响,而潜艇阻力的变化与潜艇流场的变化密切相关,故自由液面必然对潜艇伴流场产生影响[4]。
本试验测试的最小潜深为1.5D。图9是该潜深下不同航速工况下伴流场的轴向速度云图,与无限潜深条件相同,此时流场仍保持左右对称的性质;另外,考虑PIV测量误差的存在,伴流场的外半径范围亦没有显著变化,但内半径区域形式发生了明显的变化:围壳的泄出流对流场的影响随航速的增大逐渐降低;且随着航速的增加,内半径区域流场上下的对称性亦发生了改变。图10是伴流场的脉动速度云图,相比于轴向速度,脉动速度并未随着航速的增加而增加,在Fr=0.5时,脉动速度出现了较其他2个工况更为剧烈的变化。图11显示伴流场涡量随着航速的增加而不断增加,这与Olcmen等[13-14]的研究结论相符合。随着航速的增加,由于围壳、艉舵等潜艇表面附体改变艇体表面流场边界层而形成的旋涡强度会加强。

图9 1.5D潜深不同航速伴流场轴向速度Fig.9 Time averaged axial velocity field in pro-plane under 1.5D submergence-depth
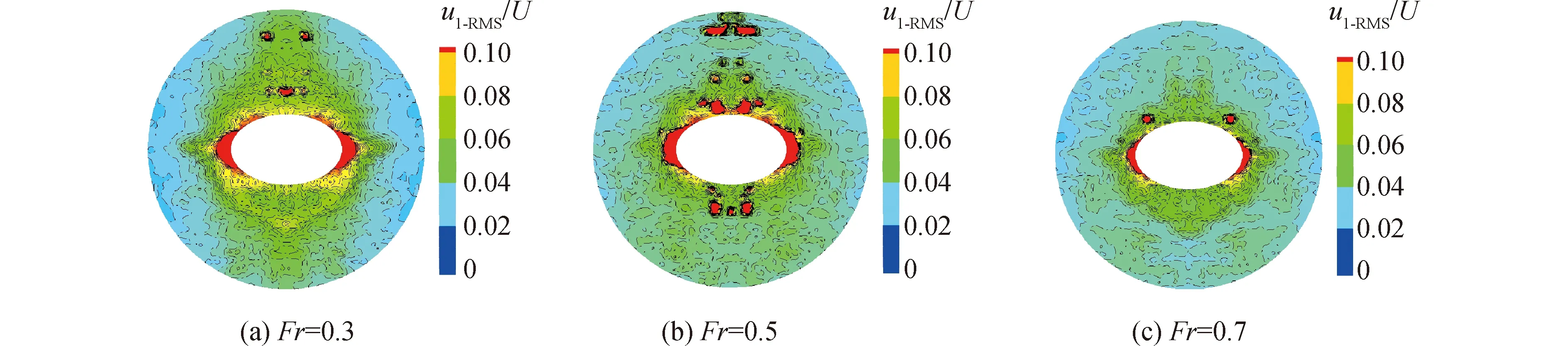
图10 1.5D潜深伴流场脉动速度Fig.10 Root mean square velocity field in pro-plane under 1.5D submergence-depth

图11 1.5D潜深不同航速伴流场涡量Fig.11 Vorticity field in pro-plane under 1.5D submergence-depth
线性波浪理论表明,潜艇在近自由液面运动时其表面兴波的波长与潜艇长度以及航速关系为[15]:
(10)
式中:FrV=U/gL;L是艇体长度。
结合本试验中模型及测量工况,具体得到的潜艇兴波长度约在0.56~3.1 m变化。在不同航速下,兴波波峰的起始位置会发生变化。兴波的波峰、波谷或其过渡波形会干扰伴流场,因而与无限潜深条件下的伴流场变化情形不同,具体的影响规律需要在后续的研究中深入探索。
图12~14是本次试验4个潜深条件下,在最大测量航速时(Fr=0.7),潜艇伴流场的轴向速度、脉动速度及涡量分布图。从中可以看出潜艇伴流场没有明显的变化规律,这可能是自由液面和潜艇流场的耦合作用的结果。线性波浪理论界定了航速和其表面兴波长度的关系,但波长或波高随潜深的变化规律没有明确给定,在不同潜深条件下,即使航速相同,兴波波长、波高亦可能不同。而这势必导致艇体和自由液面之间垂向距离的差异,若将自由液面假定为壁面条件,根据伯努利定理在两者垂向距离较大的地方,流体的压强较大而流速较小,反之流体的压强较小而流速较大[16]。因此上游潜艇艉舵及锥形艉部的形状变化,必然导致流场流速的不同,进而造成伴流场脉动速度和涡旋强度的不同,图13和图14中的测量结果对应这里的设想。

图12 Fr=0.7时不同潜深伴流场轴向速度Fig.12 Averaged velocity field in pro-plane under different submergence-depths when Fr=0.7

图13 Fr=0.7时不同潜深伴流场脉动速度云图Fig.13 Root mean square velocity field in pro-plane under different submergence-depths when Fr=0.7

图14 Fr=0.7时不同潜深伴流场涡量云图Fig.14 Vorticity field in pro-plane under different submergence-depths when Fr=0.7
4 结论
1)对无结构物的拖曳水池流场进行了测试,测得的流场平均速度和拖车拖曳速度吻合良好,分析无结构物时流场的脉动速度、湍流强度和平均动能分布,结构表明PIV测试系统具有良好的测量精度。
2)4D潜深条件下的流场分析结果验证了当潜深大于4D时自由液面对潜艇的影响微弱。
3)结合线性波浪理论,潜艇在不同潜深、不同航速下运动时,不同波长、波高的波系组成潜艇的兴波波系,同时改变潜艇兴波波系的起始位置,进而改变潜艇伴流场的流场特性。
未来仍需采用数值仿真等方法手段对自由液面和潜艇流场的相互影响作用进行深入的分析。
猜你喜欢
中国特种设备安全(2022年3期)2022-07-08
水上消防(2022年1期)2022-06-16
一重技术(2021年5期)2022-01-18
海洋开发与管理(2020年2期)2020-09-10
阅读(科学探秘)(2019年4期)2019-06-19
舰船科学技术(2018年7期)2018-07-25
读写算(2018年2期)2018-07-05
舰船科学技术(2016年1期)2016-02-27
现代畜牧科技(2015年11期)2015-10-21
地震研究(2014年1期)2014-02-27
