基于物联网的火场人员救助方法与实验*
2021-05-08 06:10:50胡宇虹
通信技术 2021年4期
张 勤,胡宇虹
(华南理工大学,广东 广州 510641)
0 引言
随着社会城市化进程加快,高层建筑大量涌现,建筑的高层化,结构的复杂化,给建筑消防带来了新的挑战。如何快速地应对火灾,减少二次灾害,保证财产和生命安全是消防救援工作的重要课题。
目前的人员救助方法主要有消防人员通过消防设备救援,直升机救援,通过逃生装备自救,以及机器人救援等方式实现人员救助。其中最常见的救援方式是消防员实地救援,消防人员收到火警,抵达火场,搜查被困人员,对被困人员实施救援。对被困人员的定位局限于大声喊叫、挥动毛巾和消防员实地搜救等原始方式,救援风险较大,容易造成二次灾害。直升机救援对建筑要求较高,仅适用于楼距较大,楼顶开阔的楼盘。随着机器人技术的发展,消防机器人不断出现,日本研制出一种复合型吊舱式机器人系统[1],通过吊舱上配备的红外线摄像和玻璃切割等装置,实现信息采集和人员救助。文献[2]提出了SIRIUSC系列的机器人,通过高层建筑顶层的提升机构和水平移动机构,机器人可以实现纵向和横向的快速移动和越障等功能。文献[3]提出高层救生舱系统,当火灾发生时,被困人员通过逃生舱快速安全到达安全地点。但无论哪种救援方法,都需要预先知道被困人员和火灾现场情况,才能实现有效的救助。
被困人员位置分布和火灾现场信息是消防救援决策的重要依据,也是实现快速、有效救援的保证。针对这个问题,国内外学者开展了一些前瞻性研究,并取得了一定的成果。
在火场信息采集方面,为确定人员分布,文献[4]提出了一个基于传感器驱动和情景感知计算的平台,通过定位移动人员携带的小型传感器标签,监测人员可以获得移动人员的准确位置和动态模型;文献[5]提出使用远程射频识别标签跟踪人员的动态位置,并搭建疏散中心信息集成系统,一旦检测到某个人员的动态位置,疏散中心信息集成系统将该位置发送到救援队,以实现快速救援。文献[6]利用具有时空地理信息系统(Geographic Information System,GIS)功能的移动机器人进入火场,通过机器人配备的多种传感器,实时勘测人员位置。文献[7]提出采用基于接收信号强度(Received Signal Strength Indication,RSSI)技术的定位系统,确定被困人员的位置。
在确定着火点位置以及火势发展上,主要借助各种传感器,感知烟雾、温度等着火点信息[8-10]来实现。
在高层建筑火灾的救援路径规划方面,国内外学者提出最短路径规划算法、群智能仿生算法、机器学习等思想来解决这一问题。在最短路径规划算法方面,文献[11]采用路由信息协议(Routing Information Protocol,RIP)中的路由(Digital Video,DV)算法,借助路由转发机制,实时计算最优逃生路径。文献[12]基于弗洛伊德(Floyd)算法,提出可以进行动态调整以及及时反馈的最优路径。文献[13]基于改进A星(A-Star,A*)算法,提出了一种效率更高的多起点、多出口的路径规划算法。在群智能仿生算法方面,文献[14]提出环境障碍阈值和安全代价函数,为火灾环境下A*算法和蚁群算法的选用提供参考。文献[15]基于改进的自适应果蝇算法,进行节点和路径容量受限情况下的动态疏散路径规划。文献[16]针对大型公共建筑的疏散规划,提出基于神经网络的动态路径规划方法,其运行速度比传统算法快8~10倍。此外,文献[17]提出基于火灾相关产物影响条件下的人员疏散速度模型,可以真实反映火场中的疏散效果。文献[18]针对火灾动态扩散过程提出基于涟漪扩散算法(RSA)的协同进化路径优化方法(Co-Evolutionary Path Optimization,CEPO),避免出现被困人员绕远现象,有效提高火灾疏散效果。
纵观国内外高层救援的现状可以看出:
(1)目前高层建筑人员救助系统主要是被动救援方式,消防人员或者机器人收到火警到达火灾现场后才开始搜救,也就是说消防响应时间内,被困人员处于等待或者随机的自救中,容易错过最佳逃生时间;
(2)救助人员与被困人员信息交互匮乏。火灾现场烟雾弥漫,由于缺少信息交互的渠道,造成搜救时间过长,逃生方向不明等混乱状态。
为了解决上述问题,本论文提出基于物联网的高层救援路径规划方法。基于物联网,建立了消防救助人员、被困人员、指挥人员、应急设施等全方位、多通道的信息采集反馈与交互系统:被困人员通过手机等终端反馈位置信息,控制中心根据火灾现场信息、天气信息、被困人员位置信息规划安全逃生路径,发出救助指令,指挥被困人员逃生;基于信息融合和蚁群算法,快速定位个性化救援目标,完成快速救援最优安全路径的规划。提出的人员救助方法,可最大限度地缩短救援时间,有效利用消防应急响应时间,实现被困人员的救助。
1 人员救援系统的构成与救援方法
高层人员救援系统由信息采集、通信系统、智能指挥控制中心、人员救助系统组成。信息采集系统通过电脑、手机等物联网终端、烟雾传感器、紧急按钮和监控等多种监测方式,收集建筑物内部的信息。一旦发生火情,立即将火警信息发送到建筑内数据库中每个人的移动终端。通过人员反馈回来的信息,收集被困人员的位置信息,并实时发送到智能指挥控制中心。交通、医疗和消防中心等外部公共信息通过网络实现共享,在消防信息采集系统实现信息融合和交互通信。通信系统建立被困人员。消防人员、救生舱等应急设备之间的联系与交互。智能指挥控制中心根据火灾现场信息、被困人员位置信息以及天气等信息规划安全快捷的逃生路径,发出救助指令给被困人员,指导逃生方法,同时调动人员救助系统完成人员救助。智能指挥控制中心系统有自主模式和人工干预模式。自主模式用于消防响应时间内的救助,一旦发生火警,立即根据信息采集系统的信息进行综合评判,生成逃生和救援路径,指挥被困人员和救助系统行动;人工干预模式是消防响应后,也就是专业消防人员到达火灾现场后,根据现场信息,综合判断,参与救援路径的规划。人员救助系统由救生舱及其附件组成,救生舱平时放在楼顶处于休眠待命状态,一旦发生火灾,可以立即激活。救生舱在楼顶可以沿导轨做平面移动,通过吊舱沿垂直方向移动,实现救生舱的空间移动,根据指挥系统生成的最优救援路径实施人员救助。人员救助方法分为集体救助和个性化救助,指挥中心根据火场分布,房间布局,易燃品、危险品分布,风向风速等信息确定个性化逃生路线,被困人员根据指挥中心反馈回来的楼层逃生路线指引,前往指定楼层避难地或者指定地点乘救生舱逃生;对于无法到达指定避难地点进行集体逃生的被困人员,按照救援指引在原地等待或者到达指定位置,救生舱根据个性化救援的人员信息,基于蚁群算法生成安全最优救援路径,救生舱依顺序将各楼层的被困人员载离。人员救助过程如图1所示。
救援路径规划软件系统是基于服务器—客户机(Client-Server,C/S)架构开发,由Mysql数据库、Tomcat服务器、客户端App组成,包含火警推送模块,被困人员信息采集模块,火灾信息融合模块,救援策略和路径生成模块,救援人员干预救援模块。
信息采集与交互是制订救援方案的依据,也是实时救援指导的保证。基于物联网的消防信息采集系统针对以太网形式的 WiFi 局域网环境,构建嵌入式 Web 服务器,设计了被困人员定位信息采集和交互通信等功能的具体实现方案。一旦有火警,被困人员手机立刻会收到预警推送提示,可以通过手机等移动终端提供被困位置信息给信息采集系统,并实时接收指挥中心反馈回来的救援引导信息进行逃生,从而极大缩短救援等待时间,增加逃生几率。消防人员也可以通过手机等移动终端登录救援页面,可查看系统收集到的被困人员位置和分布信息,掌握被困人员情况,干预制定消防策略,实现被困人员和消防人员的双向交互通信。

图1 人员救助系统
2 基于蚁群算法的个性化救援
2.1 人员救助路径优化模型的建立
在保证安全的前提下,被困人员的等待时间、救援路径的长度直接影响救援效率。首先以被困人员平均等待时间最短f1作为优化条件,筛选救援目标,然后由救生舱最短路径f2进一步优化救援路径,最后考虑着火点、危险区域、火势走向等确定最优安全路径。
建立救援界面坐标系xoy,如图2所示。设高层建筑中有n个求救位置并对其进行顺序编号,在人员救助路径中对应求救位置编号i的位置序号为ri,即ri=1,2,…,n(i≤n),每个求救位置处的等待救援人数为pi(i≤n),则需要确定一条人员救助路径r=(r1,r2,…,rm)(m≤n),使得救生舱从起始点出发经过m个求救位置后最终到达安全点,保证每个位置序号ri(i≤m)处的求救位置只经过一次。
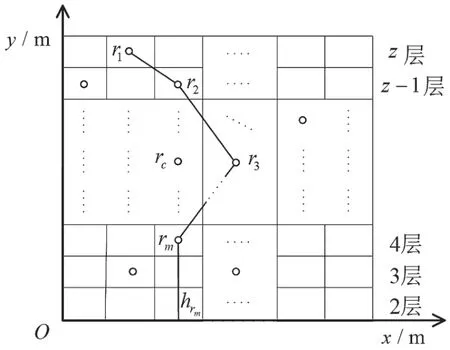
图2 人员救助路径
建立平均等待时间数学规划模型:

式中,tri表示在人员救助路径中位置序号ri处被困人员需要等待的时间;λri表示位置序号ri在路径中相对危险位置的重要程度,即权重;pri表示位置序号ri处的被困人员数量;表示人员救助路径上所有被困人员的等待时间之和;表示人员救助路径之外的所有被困人员的等待时间之和;表示高层建筑中所有被困人员的数量;dri+1ri表示求救位置ri+1ri间的距离;v表示救生舱运行速度;hrm表示最后一个人员救助路径上的位置序号到地面的高度;trm既表示人员救助路径中位置序号rm处每个被困人员需要等待的时间,同时也是人员救助路径之外的位置序号处每个被困人员的等待时间;q表示火源位置和存放危险易燃物质位置数量之和,其中危险位置序号为cj;表示各个求救位置与火源之间的距离。将相对权重进行归一化处理和累乘即可得到Scj表示中的最大值。由于救生舱等消防设备的承载能力有限,出于安全性考虑,一条人员救助路径上救援的被困人员数量不能超过其最大承载量,其中pmax表示最大承载量,此时共有m个救援位置。
经过f1生成最短平均等待时间路径后,通过最短路径模型f2进行进一步优化,获得经过危险位置点的最短救援路径。建立路径最短数学规划模型:

考虑着火点周围热场,危险点周围的不安全因素,以及风向、烟囱效应对火势蔓延的影响,确定危险区域,确保救助路径安全。
假设着火点等危险区域的热场初始半径为R(R根据火势确定)。设风向向量为e,火灾烟囱效应对危险半径影响为竖直方向的向量h,火灾危险区域在e方向上的最大值为KeR,在h方向上的最大值为KhR,Ke、Kh分别根据救援现场风速和着火点的火势确定,可以确定危险区域范围,如图3所示。
假设A、B为求救位置,从A到B实施救援时,要绕开危险区域。分别经过A、B点对二次曲线作外切线,通过对比的大小可选出避开危险区域该段路程最小值的最优安全路径。
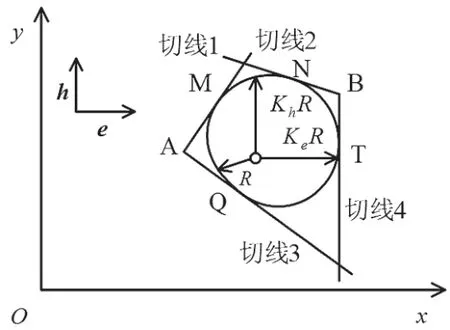
图3 最优安全路径生成
2.2 基于蚁群算法的模型求解
采用蚁群算法求解人员救助路径数学模型,分成三个模块。首先考虑路径长度,被困人员数,着火点影响,基于人员最短等待时间模型f1筛选救援位置r=(r1,r2,…,rm)(m≤n);然后基于最短路径模型f2,获得经过筛选出的救援位置的最优路径;最后考虑风向风速和危险位置避开危险,获得最优安全路径。求解过程的流程如图4所示。

图4 蚁群算法寻优人员救助路径流程
3 仿真验证与实验
3.1 仿真验证
为了验证提出算法的可靠性,基于Matlab进行仿真分析。
假设建筑有15层,着火点在1106房间,505房间内有危险品,救生舱的最大承载人数为18人。为了节约时间,首先将救生舱从楼顶移动到着火点的上方。由仿真软件随机生成的求救位置数量n为30,每个求救位置随机分布被困人员,如图5所示。图5中的小圆圈代表求救位置,数字代表该位置被困人员数量,黑色实心点、灰色实心点分别代表着火点和存放危险品房间的位置。根据蚁群算法的参数最优选择原则[19-20]设置Matlab模拟仿真参数蚂蚁数量k=13,信息启发式因子α=1,期望启发式因子β=5,信息素挥发系数ρ=0.1,信息素总量Q=100。通过100次迭代,在基于人员最短等待时间救援路径模型f1得到的m个救援位置上,再通过f2筛选出救援位置的最短路径,如图5(a)中的实线所示。在救生舱救援人数有限的情况下,在第一次救援中优先前往危险程度高,被困人员数量多的求救位置。
考虑着火点、危险点的安全范围和风向,对生成的救援路径进行优化,生成的最优安全救援路径如图5(b)所示。可以看出,生成的最优安全救援路径与人工救援方法非常相似,证明了蚁群算法求解得出的最优路径及其最优目标函数值的合理性。

图5 救援路径的仿真结果
3.2 救援响应时间实验
实验地点为华南理工大学的汽车科技大楼,该楼为L型结构的15层建筑。实验成员为50名,每人携带一部安装了高层救援路径规划软件客户端App的手机,50名成员随机分布在建筑内的某层的随机房间中。通过实验测试系统的救援响应时间,也就是测试由推送平台发送火警通知电话到手机终端,50名实验成员接收到火警后,反馈回自己的位置及安全信息,然后收到控制中心发送的个性化救援指导方案所需要的时间,每组实验重复20次。实验结果表明,在局部网环境、网络速度65 Mb/s情况下,火灾预警到达率为100%,由火警通知发出,到50名人员反馈信息到数据库的平均时间为27.92 s;控制中心生成最优安全路径并反馈给被困人员平均时间为1.5 s,也就是说,整个救援响应时间为29.42 s,与现有的消防系统收到报警、出警、到达现场至少5 min消防响应时间相比大幅度降低。图6为高层救助系统手机App的工作界面。由此可见,通过被困人员、消防人员之间的信息融合与交互,救援实时性强,救助更加有序,减少了救援盲目性,大大减少了救援时间。

图6 手机App页面
4 结语
(1)提出基于物联网的火场人员救助方法,基于多通道的信息采集、融合、决策、反馈机制,将主动救援和被动救援相结合,可以大大缩短消防响应时间,提高逃生几率。特别是对于高层或者超高层建筑的救援,消防车能力达不到的情况下,救援效果更加显著。在实验室条件下,从火警通知发出,到被困人员收到逃生指引所需要的平均时间仅为30 s,火警预警电话送达准确率达到100%,满足信息响应的准确性和实时性要求。
(2)本文建立了人员救助路径优化模型,提出了基于蚁群算法的个性化救援路径规划方法,并通过仿真证明了提出算法的可靠性。
(3)安全救援路径的规划与建筑的内部结构、人员分布、易燃易爆品的存储情况等密切相关。根据这些信息需要事前构建数据库,完备的数据库是实现安全救援路径规划的重要保证。
猜你喜欢
小学生必读(中年级版)(2021年6期)2021-09-02 08:08:28
初中生学习指导·中考版(2020年12期)2020-09-10 07:22:44
娃娃乐园·综合智能(2018年15期)2018-09-08 02:23:50
中国科技财富(2017年4期)2017-06-05 15:02:55
核安全(2016年1期)2016-06-29 01:18:12
电测与仪表(2016年18期)2016-04-11 11:31:48
试题与研究·中考化学(2015年1期)2015-06-15 08:35:11
机械工程师(2015年10期)2015-02-02 01:14:35
河南科技(2014年5期)2014-02-27 14:08:36
小猕猴智力画刊(2013年1期)2013-03-15 05:36:18