
折纸启发的空间可折展末端执行器设计
2021-05-07 02:16张强强赵传森
轻工机械 2021年2期
王 艳, 许 勇, 董 飞, 张强强, 赵传森
(上海工程技术大学 机械与汽车工程学院, 上海 201620)
折纸机器人是通过折叠实现形态和功能的自动化机器[1],它通过设计折痕的几何实现所需的功能,从而将刚性折纸与机器人紧密地结合起来,成为折纸领域发展的新方向[2]。刚性折纸凭借良好的折叠特性常被用于各种可展结构的设计中,这些特性使得其在医疗手术机器人及可展天线等方面都有着广阔的应用前景[3]。
刚性折纸机构可通过沿预定折痕的折叠实现在不同状态之间的连续运动。在运动过程中变形只发生在折痕区域,而各折叠平面不发生扭曲或拉伸等变形,因此在运动学意义上,可折叠平面等价于刚性连杆、折痕等价于转动铰链,此方法被广泛应用于刚性折纸的运动分析中[4]。受变形机器人的启发,课题组基于刚性折纸设计一款可折展末端执行器,其具有良好的折叠特性,而且单自由度驱动简单,在非工作状态下可以完全展开为一个平板从而节约空间资源。
国内外一些研究者已经提出一些折纸机构的末端执行器的设计,Kim等设计了可自锁伸缩的折纸机械臂,在无人机的作用下应用于小沟壑、树枝间隙等各种受限环境中[5]。Dai等提出了一种新型折纸式的连续型机械臂,该机械臂能够实现弯曲和收缩运动,并应用到微创手术机器人末端执行器的设计中[6-8]。Zuliani团队设计了2种折纸机械手,一种具有多种抓持构态,提高了该机械手的自适应性;另一可调刚度的丝驱动折纸机械手,提高了该机械手抓取的精确性[9-10]。姚燕安等设计了一种多面体空间抓捕机构,以并联机构为本体,将动平台用空间6杆机构代替,通过对网口的缩放对空间目标进行抓捕[11]。
课题组设计了一种新型空间可折展末端执行器,执行器使用外部链节[12]连接的方法,只需要单自由度驱动即可控制多个自由度,进而对空间目标进行捕捉或夹持操作。课题组首先提出可实现功能的外部链节单元构型;其次研究构型的折叠过程及运动特性;然后对整个外部链节机构进行驱动分析和强度分析;最后运用软件进行了仿真验证该末端执行器设计的可行性。
1 空间可折展末端执行器构型设计
在现有的折纸机构的启发下,课题组提出了一种新型的空间可折展末端执行器,将刚性折纸机构与单环闭链机构结合,只需要1个驱动即可控制该末端执行器多个自由度。刚性折纸机构可沿预定折痕进行折叠,实现在不同状态之间的连续运动,在运动过程中变形只发生在折痕区域,而各折叠平面并不发生扭曲或拉伸等变形。因而在运动学意义上,可折叠平面等价于刚性连杆、折痕等价于转动副。如图1所示为可折展末端执行器在工作过程中,对捕捉目标可执行2种工作模式:①手爪夹持式;②空间捕捉式。考虑实际情况,文中折叠纸板具有一定的厚度,只需1个转动驱动副,可以实现3个手爪同时缩放。

图1 空间可折展末端执行器工作过程Figure 1 Working process of space foldable end effector
课题组设计的可折展末端执行器中将可折展单环闭链机构作为外部链节,如图2所示。其具备整体收缩和展开的功能,在初始阶段处于“纸”平面状态,以减小所占空间、保证整体稳定性;在工作阶段由“纸”平面折叠收缩空间封闭结构,达到最大包络状态,进而对目标进行空间捕捉或夹持操作。当其由不计厚度的薄板构造时,使用的材料同普通纸张相比具有很大的刚性。通过可折展单环闭链机构作为外部链节,由单自由度驱动后折叠每个链节从而被动地控制3个折叠角度。这种方法不需要任何组装计算,且单驱动即可让结构可逆地折叠和展开,只需要最小的驱动力可实现复杂的运动。

图2 可折展末端执行器外部链节示意图Figure 2 Schematic diagram of external link of foldable end effector
刚性折纸机构的设计是通过以多种灵活方式折叠带有折痕图案的单张纸而形成的。如图3(a)所示为绘制在正三角形纸平板A1A2A3(不计厚度的薄平板)材料上的折痕图案,点P为正三角形的形心,将折痕图案沿着折痕(虚线表示折痕位置)开槽之后,纸平板可以沿着3条折痕B1B2,B2B3和B3B1折叠,可将其折叠成如图3(b)所示的正四面体构型。
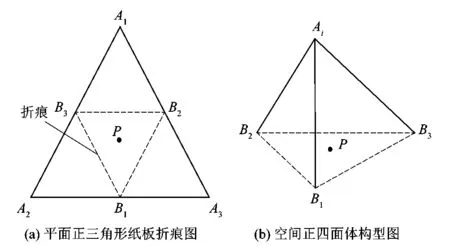
图3 折纸机构Figure 3 Origami structure
为了更好地驱动该平面正三角形纸板向空间正四面体的折叠,课题组将多自由度驱动转换为单自由度驱动,单自由度驱动折叠每个链节从而被动地控制多个折叠角度。单元折叠过程如图4所示,外部链节的单环闭链机构为特殊的面对称的Bricard机构。
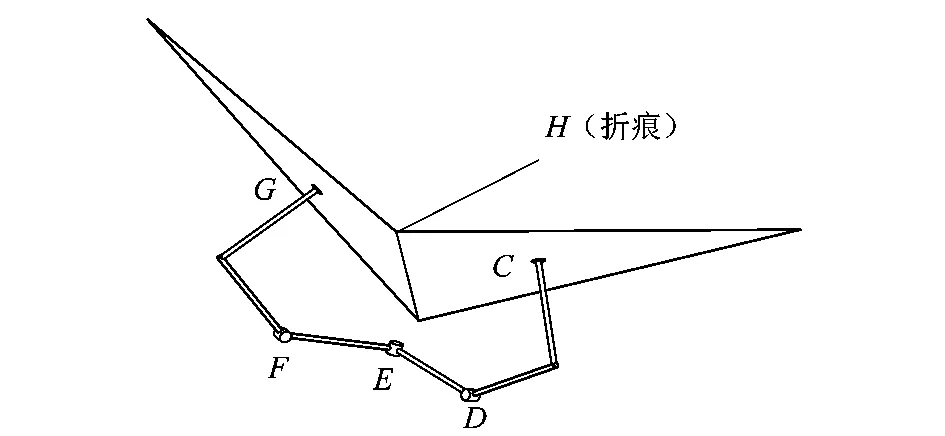
图4 单元折叠过程Figure 4 Unit folding process
2 自由度分析
如图5(a)所示建立参考坐标系o-xyz,以转动副H的中心为坐标原点o,以GC方向为x轴正方向,以转动副H的轴线方向为y轴正方向,z轴正方向根据右手定则确定,S表示运动副螺旋[13]。各构件之间均以转动副连接,SD,SF的轴线交于一点且方向平行于xoy面,SD,SF和SH的轴线方向异面交于一点,SC,SE和SG的轴线方向与z轴一致,SH的轴线方向与y轴一致。
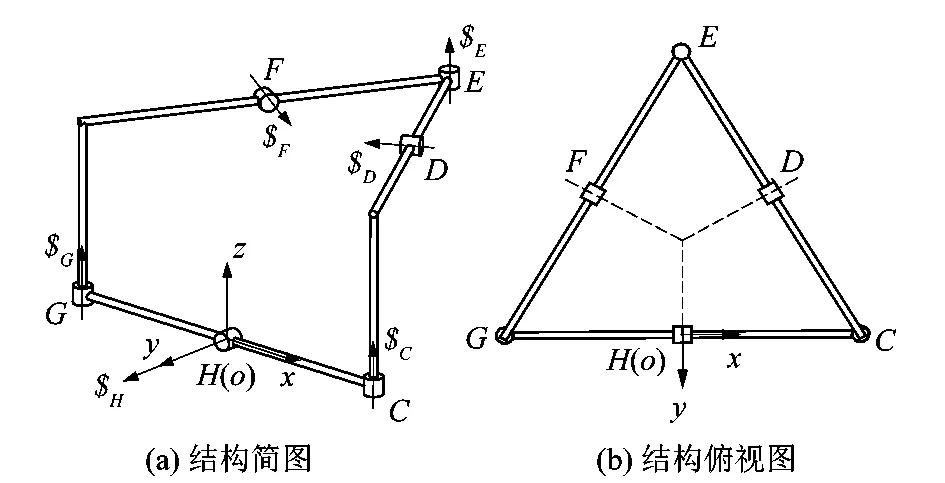
图5 面对称Bricard机构Figure 5 Planar symmetry Bricard mechanism
选取构件CH为机架,构件EF为输出构件,则输出构件通过2条对称的支链与机架相连接,SC,SD,SE构成支链Ⅰ,SF,SG,SH构成支链Ⅱ,支链Ⅰ和支链Ⅱ的运动螺旋相同。其运动螺旋分别为:
(1)
(2)
式中:a,b,c为常数。
对式(1)和(2)取反螺旋,则支链Ⅰ和支链Ⅱ的约束螺旋为:
(3)
(4)
因此支链Ⅰ和支链Ⅱ在的公共约束为
(5)
由式(5)可知,特殊面对称的Bricard机构的公共约束数λ=1。对于空间单环闭链机构基本运动副的数目和构件数相等(n=j),单环闭链机构中考虑公共约束的自由度计算公式[14]为:
λ+j=6+M;∨j>3。
(6)
式中:j为各运动副之和,M表示机构的自由度。

3 运动学分析


图6 面对称Bricard机构各参数关系Figure 6 Relationship of parameters of plane-symmetric Bricard mechanism
对于由若干连杆构成的封闭环机构来说,其能够运动的充分必要条件是各个连杆的变换矩阵依次相乘的乘积为单位矩阵,即:
T61·T56·T45·T34·T23·T12=1。
(7)
Ti(i+1)=
(8)
由对称性,可以得到下面的关系:
θ1=θ3=θ5=θ;θ2=θ4=θ6=Φ。
(9)
联立式(7)~(9)可得到该特殊面对称Bricard机构的运动学方程为:
cosΦcosθ+cosΦ+cosθ=0。
(10)
课题组将Φ和θ分别作为输入角和输出角,且输出角θ受到l和h杆长影响公式为:
h(l+cosθ)=(1-l)sinθcosθ。
(11)
4 驱动设计
使用该方法可将多个特殊的面对称Bricard机构进行固结,同一驱动下可对正多面体构型多条折痕进行折展。这种机构的各个相邻部件之间是通过转动副来连接的,能够将原动件的旋转运动在不需要外加条件的情况下转化为多个同步的末端旋转运动,并且这种传递精度非常高,降低了系统集成复杂性。
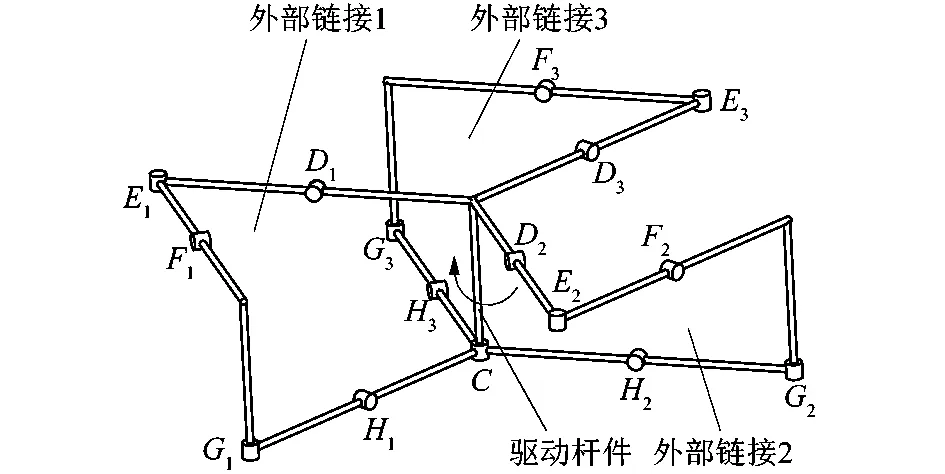
图7 3个固接后的面对称Bricard机构示意图Figure 7 Schematic diagram of three fixed surface-symmetric Bricard mechanisms
5 仿真实验
该可展末端执行器初始位置处于“纸”平面状态,此时折叠角为0°;在工作阶段由“纸”平面折叠收缩空间封闭结构,达到最大包络状态,折叠角的角度变化范围在0°~60°,就能够完成整个夹持或者捕捉过程。因此,无论该外部链节旋转驱动方向如何选取,输出角都能达到其折叠状态,使其不受干涉完成整个折展过程。从图8中可知3个输出角变化曲线重叠在一条曲线上,也证明了外部链节驱动选取的正确性。
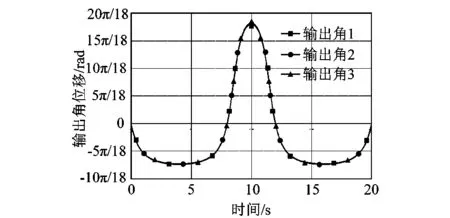
图8 输出角位移变化曲线Figure 8 Output angular displacement change curve
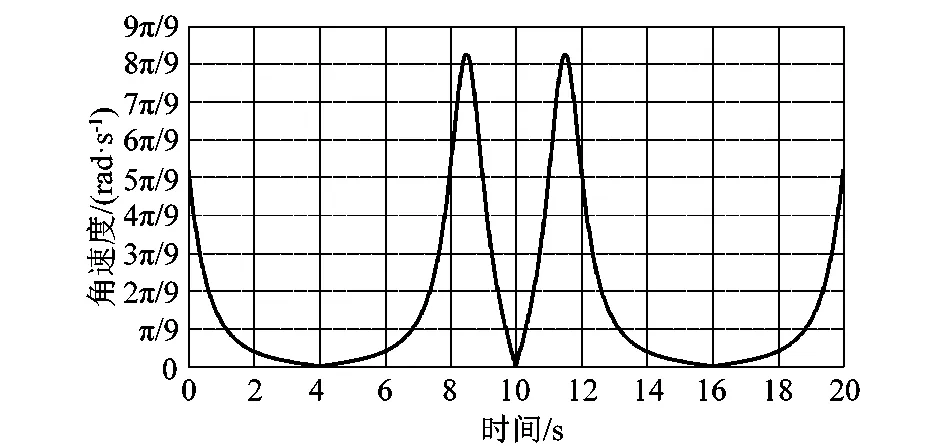
图9 输出角速度变化曲线Figure 9 Output angular velocity change curve
6 应力分析
为了进一步分析对可折展末端执行器设计的实际操作的可行性,对其进行了应力分析。将SolidWorks的模型图导出,在ANSYS软件里进行仿真。该末端执行器选用薄板厚度为5 mm的钛合金材料,其屈服强度为1 100 MPa,在3个接触点Gi施加20 N应力,在3个接触点Ai处施加10 N应力。如图10所示为整个可折展末端执行器的位移云图,图11为最大最小位移云图。从图中可以看出最大位移出现在折痕边缘位置,最小位移量在驱动杆与正四面体构型的连接位置。

图10 整体位移云图Figure 10 Overall displacement cloud map

图11 最大最小位移云图Figure 11 Maximum and minimum displacement cloud map
图12为整个可折展末端执行器的应力云图,图13为出现的最大最小应力图。可以看出整体应力值较小且分布比较均匀,应力值范围值在为0~41 MPa,在施加应力的3个接触点Gi处,应力值最大达到731 MPa,低于屈服强度,所以在该条件下设计能够满足要求。

图12 整体应力云图Figure 12 Overall stress cloud diagram

图13 最大最小应力云图Figure 13 Maximum and minimum stress cloud diagram
7 结语
课题组设计了一种空间可折展末端执行器,将刚性折纸机构与空间单环闭链机构结合,提出一种外部链节间接控制的方法。该方法以空间单环闭链机构为外部链节作为过渡,将多个外部链节进行固接,只需要单驱动即可间接去控制多自由度刚性折纸机构的折展过程。
1) 设计以空间正四面体为末端执行器,其具备整体收缩和展开的功能,在初始阶段处于“纸”平面状态;在工作阶段由“纸”平面折叠收缩空间封闭结构,达到最大包络状态,进而对目标进行空间捕捉或夹持操作。
2) 以3个特殊的面对称Bricard作为外部链节进行固接,通过本机构只需1个旋转驱动去折叠3个外部链节,从而被动地控制3个折叠角度。这种方法有4个优点:减少了驱动副的数量;无需进行任何组装计算;降低了系统集成复杂性;结构可以可逆地折叠和展开。
3) 通过仿真验证了外部链节驱动选取的正确性,可以实现单个驱动去控制多个自由度折纸机构的折展过程。对机构的应力进行分析,验证了该可折展机构具有可行性。
猜你喜欢
内燃机与配件(2022年19期)2022-12-02
液压与气动(2022年10期)2022-11-27
汽车实用技术(2022年15期)2022-08-19
纺织科学研究(2021年7期)2021-12-02
汽车维修技师(2019年2期)2019-08-23
青春(2017年5期)2017-05-22
娃娃画报(2016年9期)2016-11-12
阅读与作文(小学高年级版)(2016年10期)2016-10-12
小学阅读指南·低年级版(2016年2期)2016-09-10
小学生导刊(低年级)(2016年6期)2016-07-02
