
孤岛微电网中基于电压-频率下垂与磁链-相角下垂两种控制策略的性能比较
2021-05-06 02:33
浙江电力 2021年4期
(国网浙江省电力有限公司培训中心,杭州 310015)
0 引言
根据2019 年《BP 世界能源统计年鉴》,煤、石油、天然气等传统化石能源需求仍在持续增长,碳排放增速也达到了近7 年以来的最高水平[1]。考虑到化石能源的不可再生性及高碳排放的危害,推行清洁能源发电方式十分重要。基于太阳能、风能等清洁能源的DG(分布式电源)具有控制灵活、低碳排放等一系列的优点。但是,由于太阳能、风能等自然界能源能量密度波动大、发电时间不连续,控制难度大等特点,大量以该类能源为载体的DG 并入传统电网会给系统的安全稳定运行带来极大的挑战。同时,IEEE P1547规定:当电力系统出现故障时,DG 必须立即脱离主网。这极大地限制了DG 作用的发挥[2]。
为了解决DG 直接接入带来的系列问题,充分发挥DG 的作用,引入了微电网技术[3-6]。微电网通过先进的电力电子技术,有效整合了DG、储能、负荷、控制保护系统等,为传统电网供电提供了有力的补充和支持[7]。微电网通过静态开关与主网相连。当静态开关闭合时,微电网处于并网状态,由大电网提供频率和电压的支撑。当静态开关断开时,微电网处于孤岛状态,此时需要微电网自身建立系统内的电压和频率平衡[8]。
孤岛状态下,微电网作为一个独立的主体运行,要在系统内建立起稳定的电压,需要对逆变器采取有效的控制措施。下垂控制就是其中最常用到的一种控制方法,它具有独特的控制优点:一方面,控制信息来源于本地,不需要额外增加通信设备进行远端信息传输;另一方面,当微电网内有DG 投入或退出时,其它DG 的控制不受影响,无需对其控制系统进行二次调整,系统扩容方便,可以实现微源的“即插即用”[9]。
通过对相关文献进行总结,下垂控制可以分为两大类:一类是基于电压的下垂控制方法,另一类是基于磁链的下垂控制方法[10]。在电压下垂控制中,通过对电压、频率两个参数进行控制,建立起系统内的电压平衡。控制系统中存在多重反馈环路,需要整定电压外环的PI 参数和电流内环的P 参数[11],三个参数的整定过程比较复杂,需要耗费大量的时间。另外,根据下垂关系,当DG 输出功率不等于额定功率时,电压和频率会相应地偏离额定值,电压偏差和波动会造成电能质量下降,无法满足负荷的用电需求。磁链下垂控制采用一种新的思路,根据电压与磁链间的积分关系,将电压下垂转换为磁链下垂,通过间接地对磁链和相角两个参数进行控制,建立起稳定的系统电压。在控制方法中,用DFC(直接磁链控制)取代了多环反馈控制,避免了复杂的参数整定,控制过程简单。控制中还有一个显著的优点:利用相角下垂代替频率下垂,避免了有功偏差直接带来的频率偏差,频率偏差大大减小[10]。
为了更深入地了解以上两种下垂控制方法,方便以后在微电网系统中的推广应用,本文对上述两种方法进行了比较。首先,分析了两种控制方法的原理。接下来,设计了两种方法的控制方案。最后,基于MATLAB 仿真平台对同一个算例下两种控制方法的控制性能进行了比较。
1 下垂控制原理
1.1 电压下垂控制原理
DG 以逆变器为接口接入电网,图1 为DG的等效接入电路。

图1 DG 的等效接入电路
传统的电压下垂控制公式为[12]:

式中:ω,V 分别代表角频率和电压幅值;ωn,Vn为其对应的额定值;m,n 分别为有功-频率和无功-电压下垂系数;P,Q 分别为输入到负载侧的有功功率和无功功率;Pn,Qn为额定的有功和无功功率。
1.2 磁链-相角下垂控制原理
电压和磁链满足积分关系,经推导可以得到磁链下垂控制公式[10]:

2 下垂控制器设计
2.1 电压下垂控制原理
电压下垂控制结构如图2 所示,主要有功率控制模块,电压-电流双环控制模块和SPWM(正弦脉宽调制)模块等。控制原理如下:将负载电压和电流送入功率控制模块,经过平均功率计算、下垂控制、电压合成等环节得到三相参考电压值,接下来经过电压外环和电流内环得到调制信号,最后通过SPWM 产生逆变器驱动信号,从而建立稳定的系统电压。
2.1.1 功率控制模块
在d-q 坐标系下,负载侧的瞬时功率p 和q可以表示为:


图2 电压下垂控制结构
通过一阶低通滤波器可以得到平均功率P 和Q。已知平均功率,结合电压下垂公式,可以得到参考电压幅值E*和ω*参考角频率,由此得到三相参考电压。
2.1.2 电压电流双环控制模块
本文采用了电容电流内环、电感电压外环控制策略。电压外环采用PI 参数调节以保证对负载电压的准确跟踪,电流内环采用P 参数调节以提高动态响应速度。在双环控制中,选择合适的PI和P 参数十分重要。三个控制参数的选取需要复杂的参数整定。
2.2 磁链下垂控制器设计
磁链下垂的控制结构如图3 所示,主要由功率控制器和DFC(直接磁链控制器)组成。首先,利用负载电压e 和电流i 计算得到平均功率,再结合磁链下垂公式得到参考磁链幅值和相角δref。在直接磁链控制器中,将两个参考值与实测值进行比较,得到偏差符号,再结合磁链矢量的具体位置,通过矢量选择表进行矢量选择,从而实现对磁链幅值和相角的跟踪控制。控制中用两个滞环比较器取代了PI 调节,省去了复杂的参数调试过程,控制难度大为减小。控制过程中,磁链幅值和相角的跟踪精度取决于滞环宽度。
2.2.1 功率控制器
磁链下垂控制在α-β 坐标系中进行。此时瞬时有功功率p 和瞬时无功功率q 的表达式为:

图3 磁链下垂的控制结构
式中:eα和eβ为负载侧电压在α-β 坐标系中的电压分量;iα和iβ为负载侧电流在α-β 坐标系中的电流分量。通过低通滤波器得到平均功率P 和Q,将计算得到的功率送入磁链下垂控制公式,即可得到和δref。
2.2.2 直接磁链控制器

图4 DFC 的控制结构
在DFC 中,磁链幅值和相角的计算公式为:

式中:ψVα和ψVβ为逆变器侧磁链的α 轴和β 轴分量,满足:

偏差信号定义为:


α-β 平面的6 扇区划分如图5 所示,整个平面被划分成6 部分,每部分60°,按逆时针方向依次命名为S1—S6。其中,S1扇区以水平轴线α为对称轴,上下角度各15°。V0—V7代表了8 种不同的开关状态,V1—V6是6 个工作电压矢量,V0和V7是两个零开关矢量。需要注意的是:V1—V6的作用效果均使相角增大,只有V0和V7两个零开关矢量才能减小相角值[13]。
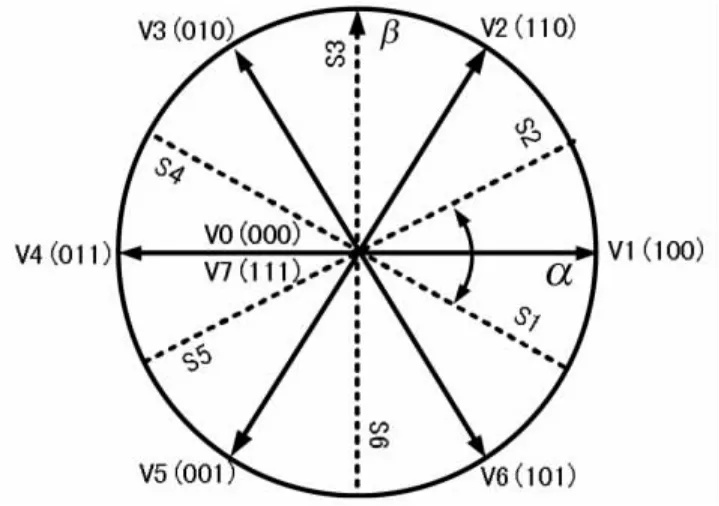
图5 平面的6 扇区划分

表1 开关矢量选择
在该类下垂控制中,磁链是与电压紧密相关一个控制变量,DFC 减小了控制的难度,但是由此产生的磁链脉振会影响系统输出电能的质量。
3 建模与分析
图6 为仿真微电网模型,其元件参数见表2。S 为负荷投切开关,t=0.15 s 时,S 闭合,负荷增加。
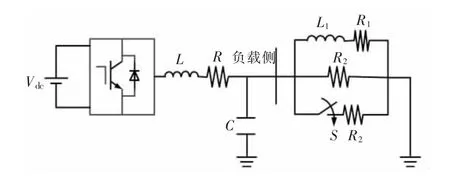
图6 仿真微电网模型

表2 微源参数
3.1 电压下垂控制仿真结果
采用电压下垂控制得到的电压波形如图7 所示。从图7(a)中可以看到,系统电压在很短的时间内(约0.01 s)就能达到稳定值。t=0.15 s 时,R2投入,系统有功负荷增加,无功负荷不变,因此开关闭合前后电压波形无明显变化。对负载变化前后电压进行谐波分析(分别取t=0.1 s、t=0.2 s),可以看到负载变化前总谐波畸变率仅为0.34%,变化后谐波畸变率为0.88%,如图7(b)所示。


图7 电压下垂控制中的输出电流
图8(a)为电压下垂控制中得到的输出电流波形。与电压类似,电流也能在很短的时间内达到稳定值。t=0.15 s 时,有功负荷增加,相应的电流幅值增大。对负载变化前后电流进行谐波分析(分别取t=0.1 s,t=0.2 s),可以看到负载变化前电流总的谐波畸变率仅为0.30%,变化后总谐波畸变率为0.80%,电流波形质量良好。

图8 电压下垂控制中的输出电流
图9 为系统输出的频率波形。由图9 可知:初始时刻系统频率为60.24 Hz,0.15 s 之前频率稳定在59.88 Hz,0.15 s 之后频率稳定在59.71 Hz,分别偏离额定频率值+0.24 Hz,-0.12 Hz,-0.29 Hz。当输出有功不等于额定值时,系统频率会相应地偏离额定值,甚至出现频率越限,这是传统电压下垂中的一个显著缺陷。

图9 电压下垂控制中的输出频率
3.2 磁链下垂控制仿真结果
图10 为磁链轨迹,其中虚线表示额定磁链轨迹,其幅值的计算公式为:2πfn)≈7.796;实线表示实际的磁链轨迹,仿真得到的平均幅值为7.575,这是因为实际输出无功功率偏离额定值,故磁链的平均值与额定磁链值存在偏差。从图中可以看出采用6 扇区划分时,磁链轨迹近似为圆形,这说明电压被控制在参考值附近。但是由于采用滞环控制,磁链存在脉振,这会间接地影响系统输出电压的质量。

图10 磁链下垂控制中的磁链轨迹
采用磁链下垂控制得到的电压波形如图11 所示。从图11(a)所示,系统电压在0.04 s 的时间内达到稳定。0.15 s 时,R2投入,因为无功负荷不变,故电压幅值无明显变化。另外,从图中可以看到0.15 s 前后波形质量存在比较明显的差异,这说明磁链下垂控制对负荷变化比较敏感。对负载变化前后电压进行谐波分析(分别取t=0.1 s,t=0.2 s),可以看到负载变化前电压总的谐波畸变率为2.09%,变化后谐波畸变率为1.20%,电压质量符合要求,如图11(b)所示。系统电压的动态响应速度低于传统的电压下垂控制,电压畸变率也比传统的电压下垂控制高。

图11 磁链下垂控制中的输出电压
图12(a)为磁链下垂控制中系统输出的电流波形。与电压类似,电流也在0.04 s 内达到稳定。t=0.15 s 时,有功负荷增加,相应的电流幅值增大。对负载变化前后电流进行谐波分析(分别取t=0.1 s,t=0.2 s),可以看到负载变化前电流总的谐波畸变率为1.32%,变化后谐波畸变率为0.84%,电流波形符合要求,但是电流畸变率比较高。

图12 电压下垂控制中的输出电流
图13 为磁链下垂控制中系统输出的频率波形。从图中可以看到:频率位于额定值附近,偏差量很小。即使t=0.15 s 有功负荷增加,频率出现暂时下降,最终也会恢复到额定值附近,系统稳定后频率偏差近似为零。从频率图中可以看到频率不是一个稳定不变的数值,而是在不断地微小波动,这是由相角在滞环范围内的波动引起的。但是由于被紧密控制,故频率变化范围很小。采用相角控制避免了频率的直接下垂,从而有效地减小了频率偏差,提高了电能质量。这是磁链下垂控制优于传统电压下垂控制的地方。

图13 磁链下垂控制中的输出频率
4 结论
本文对两种下垂控制策略进行了深入的对比分析,得出了以下结论:
在传统的电压下垂控制中采用“功率-电压-电流”三环控制策略,需要复杂的参数调试过程。直接频率下垂导致系统输出频率较大程度地偏离额定值,影响电压质量。但是该控制策略的动态响应速度较快、跟踪效果好,能在较短的时间内建立系统的电压、电流平衡。同时具有良好的静态稳定性,电压、电流输出波形良好,谐波畸变率很小。
在磁链下垂控制中采用了DFC,避免了复杂的参数整定过程,大大减小了控制的难度。相角下垂取代频率下垂从而实现了频率的微小偏差甚至零偏差。但是由于采用了滞环控制,导致输出的电压、电流特性不如传统的电压下垂控制,谐波畸变率较大,响应速度也比较慢。
以上两种方案各有优劣,但均能在孤岛系统内建立稳定的电压。需要根据微电网内具体的电压质量要求选择合适的控制方案。
猜你喜欢
电子制作(2018年1期)2018-04-04
摄影之友(影像视觉)(2017年10期)2017-11-07
电气开关(2016年6期)2016-08-11
西安工程大学学报(2016年2期)2016-06-05
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年6期)2016-04-11
华东理工大学学报(自然科学版)(2015年2期)2015-11-07
电测与仪表(2014年23期)2014-04-04
电测与仪表(2014年11期)2014-04-04
癌变·畸变·突变(2014年2期)2014-03-01
