
电力行业旋翼无人机智能遗传算法参数优化
2021-04-30 07:25杨佳艺
电子设计工程 2021年7期
金 钊,张 江,张 帆,杨佳艺
(1.内蒙古电力科学研究院,内蒙古呼和浩特 010020;2.包头供电局,内蒙古包头 014030)
随着智能电网及物联网ICT(Information Communication Technology)的大力发展,无人化、高效率机器办公成为电网努力革新的方向。其中,电力巡检一直都是电网保电传输的重要维护手段,为保证高质量巡视电力线,电网公司成立航检中心,利用直升飞机及高精度相机来进行电力线缺陷检测,其主要依靠人工检测,具有一定检查误差,并造成了较大的人力资源及物力资源浪费。但随着小型化民用无人机技术的成熟及价格越来越低廉,视觉无人机开始代替直升机做越来越多的工作,并开拓了新的发展思路及研究领域。电网行业秉承着科技革新的理念,开始利用无人机来代替直升机进行电力线的巡视工作。
相较于直升机,无人机飞行控制简单,搭载高清图传可实时传输高清现场画质,结合视频处理,可应用于线缆缠绕物识别,绝缘子爆破等多个领域中,具有极其广泛的探索研究前景。结合无人机的灵活性、高效率和速度,无人机已逐渐成为电网巡视系统检测的新趋势。但内蒙古电力科学研究院身处内蒙古,高低温差大,平原辽阔风沙较大,成为无人机电力巡检应用上一道巨大的壁垒,为普及无人机在内蒙古电力巡线上的应用,提升无人机在极端条件下的操控及适应能力成为内蒙电网无人机应用首要研究内容。
PID 是目前无人机主要应用的飞控算法,结构简单、参数易整定、鲁棒性强等特点成为无人机提升性能的主要技术手段[1-2]。但在处理无人机应用于极端条件时,PID 模型控制补偿外部抗扰动能力较弱,平滑性、精确性与实时响应之间不能达到理想的平衡效果,无法应用于实际环境。而遗传算法PID 参数控制算法采用快速迭代寻优策略,通过筛选经典PID 算法计算参数集来提升PID 算法寻优区间,响应速度快,可实时调节控制器参数,既保证了经典PID控制器的鲁棒性又有较强的环境自适应能力,提升了无人机在极端环境下的可操作能力[3-5]。因此,深入研究遗传算法对无人机在内蒙古电力巡检上有深入研究的理论意义及对未来搭载无人机传感器横向应用具有广泛前景。
1 改进遗传算法应用步骤
1.1 遗传算法的基本概念及算法流程
遗传算法思想源于达尔文自然界优胜略汰的生物法则,最早由Michigan 大学的John Holland 提出[6]。其主要思想是模仿生物通过遗传和进化过程来适应复杂环境变化的一种自适应全局优化概率搜索算法。其算法核心是通过选择、交叉、变异3 个过程来模仿自然界法则,通过不断迭代过程中生成的解集来优化参数区间,计算算法的最优解[5]。其主要核心算法流程如下:
编码:以某种编码方式为基础,通过将染色体抽象为与编码方式相对应的符号,并通过随机排序生成种群串。
适应度:对种群串染色体进行编码,并设每个种群个体对应一个解,且每个解对应一个适应度值。其中,适应度值是评判遗传算法对于所解模型好坏程度的唯一计量标准。
复制:选择前代中适应度值高的种群串来生成新一代的过程。通过定义计算适应度值越高的种群串为新一代来完成种群串进化。
交叉:源于种群繁殖进化过程,通过将随机两个染色体交叉重组来形成新染色体,并以此来计算出适应度高的染色体种群。
变异:以自然界中基因突变来对种群进行随机改变,并小概率随机地改变种群串某一位的值,来提升种群的随机性。
其应用步骤如下:
1)编码随机问题解集,并生成初始种群;
2)计算初始种群适应度函数,并计算种群个体适应度值,优先选择适应度值高的个体;
3)建立选择算子、交叉算子、遗传算子模型,开始遗传操作流程;
4)设迭代完成或前后种群一致为算法终止条件,如果算法判定终止,则进入第5)步,否则以当前种群为新种群开始迭代;
5)输出种群最高适应度值解集。
算法流程图如图1 所示。

图1 遗传算法系统流程图
基本遗传算法的5 个运行参数如下:
M:种群规模,考虑算法计算能力,取值为20~100;
G:定义为前后两代染色体差值,若无重叠G=1,否则0<G<1;
Max Gen:终止进化代数,一般可以取100 到1 000;
Pc:交叉概率,一般可以取0.4 到0.9;
Pm:变异概率,一般可以取0.000 1 到0.1。
1.2 计算适应度
由上文介绍可知,遗传算法适应度函数为算法计算种群优劣性的唯一评价标准。在遗传算法迭代寻优过程中,通过计算新生种群适应度值来缩小最优解范围,最后,计算种群中个体适应度值来求解。适应度计算方程主要选用误差绝对值时间积分性能,并利用输入平方项对控制能量进行约束[7]。可令目标函数如式(1)所示:

并将e(t)定义为系统误差,u(t)定义为输出,w1、w2、w3为权重值,相加和为1,tu用于调节时间。此外,目标函数的数值是大于或等于0 的,且计算值越大,算法越接近最优解。针对文中的研究内容,将目标函数改为适应度函数,文中研究适应度函数为:

1.3 选 择
为有效地对生成种群进行编码,文中研究采用均匀排序法,并依次对群体中的个体适应度值进行计算,并以单独个体的适应度值种群占比作为该个体适应度概率,并定义概率函数如式(3)所示:

其中,Fcx为种群中第x个个体的适应度值,FΣ为当前种群适应度和。
通过使用适应度概率,可有效防止适应度值高的个体被淘汰,及防止随机排序中个体选择概率相同。
1.4 交 叉
进行完选择流程后,被选择个体会通过交叉方式来交换个体间字符串相对应的基因,并以此产生新生个体,该个体组合会继承父代个体的优秀因子。文中主要采用算数交叉法,交叉后相邻的第i个个体和第i+1 个个体如式(4)、(5)所示:

其中,Pc1=0.9,Pc2=0.6。
1.5 变 异
进行种群交叉完的个体,将有一定概率发生种群变异,该个体字符串某个值会发生改变[8]。因此,设变异概率如式(7)所示:
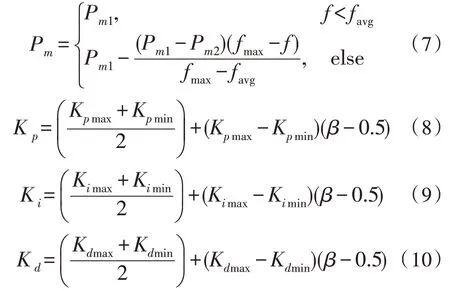
其中,favg定义为适应度均值,fmax为适应度极大值,Pm1为变异个体适应度值,Pm2为交叉个体最大适应度值;β∈[0 1]为一个随机数;Kpmax和Kpmin分别为基因Kp的上限和下限;Kimax和Kimin分别为基因Ki的上限和下限;Kdmax和Kdmin分别为基因Kd的上限和下限。
2 PID控制器设计
PID 控制是一种经典的线性控制方法,其模型主要通过对差值输入信号进行比例、积分、微分运算,来对控制对象进行最优解计算,从而得到PID模式控制器的理想输出[9]。其算法模型原理图如图2所示。

图2 PID算法系统框图

其中,r(t)为系统输入,e(t)为输入与输出间的差值,u(t)为控制器输出,y(t)为系统输出,Kp,Ti,Td分别为系统的比例参数、时间常数及时间微分常数,Ki=Kp/Ti为系统积分常数,并定义微分参数Kd=Kp*Td,Kp,Ki,Kd即为文中所搜索寻优参数。
2.1 基于改进遗传算法的PID控制器设计
文中结合上文遗传算法模型与典型PID 控制器,构成了基于遗传算法的PID 模型参数控制器。遗传算法PID 控制器中,经典PID 控制器主要工作为控制对象的进闭环循环控制,而新加的遗传算法模块则依据经典PID 系统运行参数来优化PID 参数的数值,直到前后参数结果一致或迭代结束,并输出最优参数[10]。
遗传算法PID 参数控制器中,遗传算法模块将PID 控制器的Kp,Ki,Kd3 个参数作为遗传算法输入解集区间;遗传算法模块主要对输入解集进行编码,种群筛选、交叉、变异,并通过迭代来寻优[11-12]。其模型框图如图3 所示。
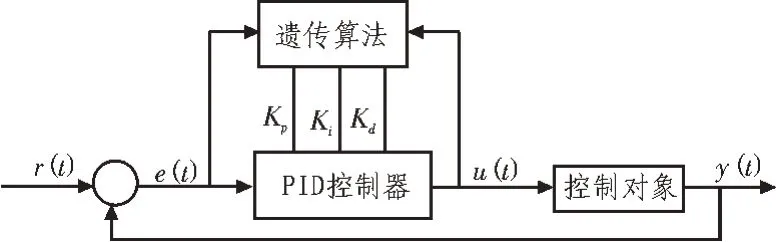
图3 遗传算法PID控制器
2.2 电力巡线无人机姿态控制数学方程的建立
文中主要研究旋翼无人机在极端环境下的姿态控制,与速度成正比的阻力是研究无人机在风沙环境下的主要扰动因素,故文中以该扰动因素作为主要影响量,近似模拟无人机在实际环境中的飞行状态。文中将与速度成正比的阻力作为扰动因子,建立无人机状态空间方程,如式(14)所示[13-15]:
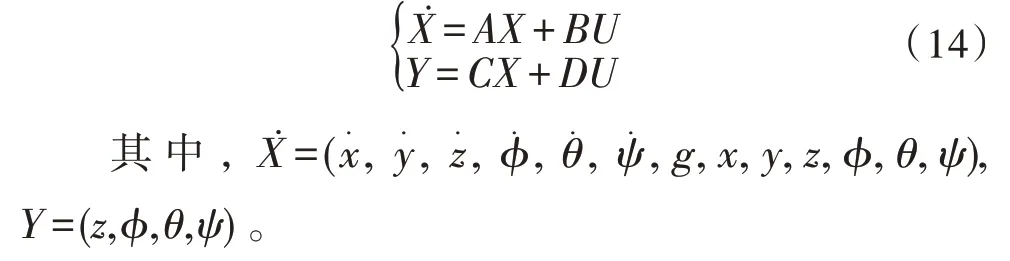
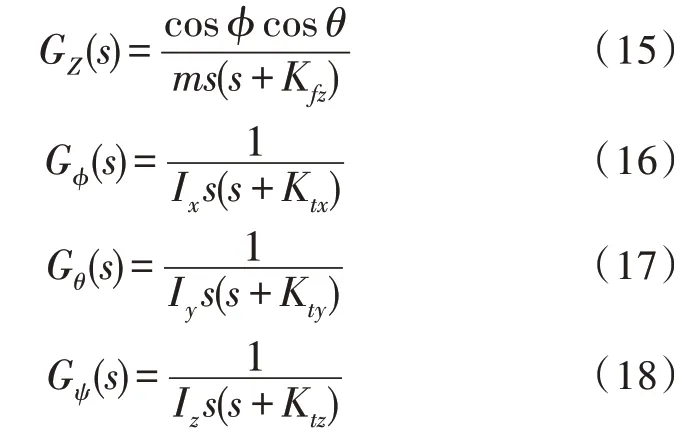
根据上文的状态空间方程和系统传递函数G(s)=(sI-A)-1,可计算得到Z轴和姿态传递函数,如式(15)~(18)所示[16-19]:
3 仿真实验结果
文中主要研究无人机在电力巡检作业中的PID参数控制,故选取式(12)旋翼无人机俯仰角模型及式(13)偏航角模型,并在Matlab 进行建模。分别设俯仰角仿真时间为0.8 s,翻滚角响应速度为3 s,输入信号为单位阶跃信号,迭代次数Max Gen 为20,姿态控制模型参数定义如表1 所示,其实验结果如图4~6 所示。

表1 姿态控制模型参数定义
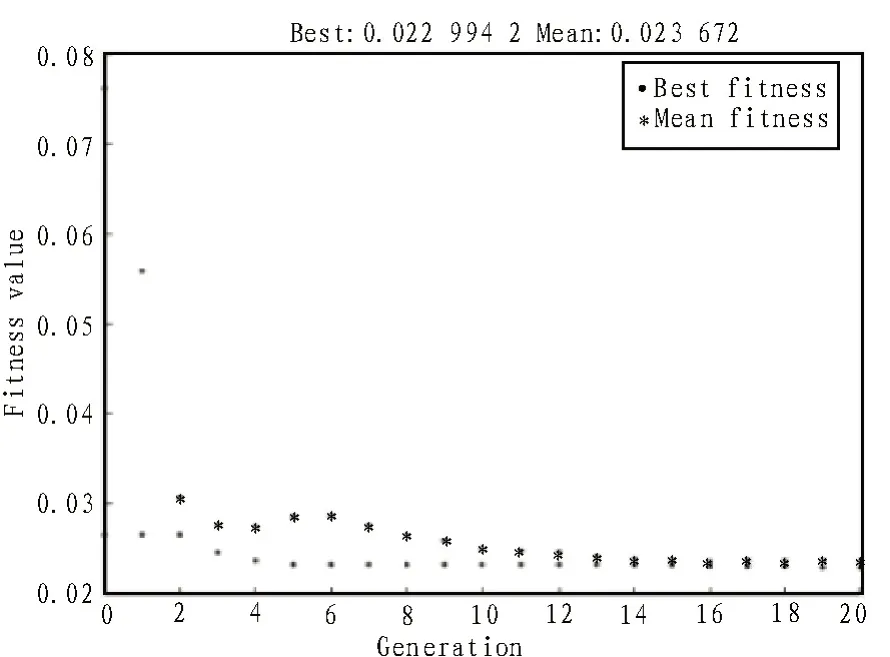
图4 最优适应度值与平均值
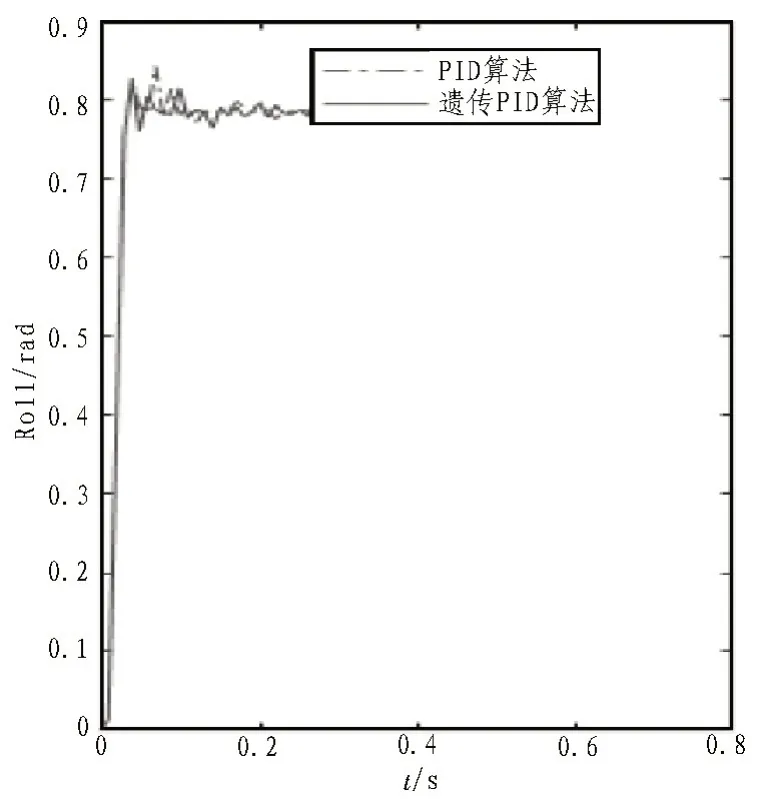
图5 翻滚角PID响应
根据图4~6 中的计算结果可知,遗传算法PID 控制模块计算种群平均适应度值为0.023 672,最优适应度值为0.022 994 2,且从图4 可以看出,遗传算法PID 参数模型相较经典PID 参数模型具有更快的响应速度,并随时间变化收敛性更好,俯仰角爬升至2 m后快速平滑。从图4、图5 可以看出,遗传算法PID参数控制相较传统PID 模型具有更快的整定速度及更高的算法收敛度,提高了算法应对变化环境的实时性。

图6 俯仰角PID响应
4 结束语
旋翼无人机PID 参数控制器算法的主要计算核心是PID 参数模块,但由于PID 参数模块PID 模型控制的补偿外部抗扰动能力较弱,文章通过遗传算法寻优来提升算法的复杂环境自适应能力,提升PID参数控制器的复杂环境稳定性,进而提升无人机在复杂环境中的可操作能力。为验证遗传算法与PID模型的定相结合效果,通过在Matlab 上搭建无人机姿态控制模型并进行仿真,通过实验结果证明:遗传算法PID 参数控制器相较经典PID 参数控制器有更快的整定速度、低超调,收敛更加精准,可以满足无人机在实时环境下姿态控制的要求,进而提升无人机在多变环境下的可操作能力。
猜你喜欢
计算机仿真(2022年8期)2022-09-28
初中生世界·八年级(2019年6期)2019-08-13
郑州大学学报(工学版)(2018年2期)2018-04-13
石油地球物理勘探(2017年2期)2017-11-23
中央民族大学学报(自然科学版)(2017年1期)2017-06-11
统计与决策(2017年2期)2017-03-20
小学生导刊(低年级)(2016年9期)2016-10-13
小学生导刊(低年级)(2016年6期)2016-07-02
中国塑料(2016年11期)2016-04-16
智能系统学报(2015年4期)2015-12-27
