
基于车辆加速度数据的互通立交匝道驾驶风险分析*
2021-04-29 13:31丁瑞刘俊蒋艳徐进,4▲
交通信息与安全 2021年1期
丁 瑞 刘 俊 蒋 艳 徐 进,4▲
(1.重庆交通大学交通运输学院 重庆400074;2.重庆轨道交通(集团)有限公司 重庆400042;3.四川南渝高速公路有限公司 四川 南充637000;4.重庆交通大学山区复杂道路环境“人-车-路”协同与安全重庆市重点实验室 重庆400074)
0 引 言
互通立交匝道是1种利用空间结构将不同方向的车辆进行转换的重要交通纽带。它通过对同一空间上的道路进行交叠,使车辆的分流、合流和交织更加合理,以达到舒缓交通和方便车辆进出主干线的目的。近年来,伴随着我国经济持续向好的局面,城市道路及高速公路的道路承载能力越来越难以满足日益增长的汽车保有量和居民出行次数。为了消除交通堵塞,缓解道路压力,互通立交匝道的建设已经成为了当前我国道路路网建设中不可或缺的一部分。
互通立交匝道的线性设置与空间布局与传统的主干线道路有明显的差异,汽车在立交匝道上的速度变化模式也比在主干线道路上复杂得多。立交匝道上汽车行驶速度频繁变化的特点以及弯道线性条件的复杂性,使得汽车的加速度处于不断变化的状态,这显然不利于驾驶员对汽车行驶速度的把控和对安全加速度的判断,容易在立交匝道上造成交通拥堵甚至交通事故。
加速度作为汽车行驶速度变化的要素因素,是体现汽车行驶状态的主要参量之一,同时也是反映汽车驾驶稳定性、舒适性、安全性和分析驾驶行为的核心指标。汽车在行驶过程中会产生3个不同方向上的加速度:①平行于行驶路径的纵向加速度;②垂直于行驶路径的横向加速度;③垂直于行驶水平面的竖向加速度。3 个方向的轴向加速度共同作用于汽车的行驶特性。研究汽车加速度的文献中,Liu 等[1]通过研究汽车的纵向和横向二维瞬时加速度,建立了对瞬时驾驶决策的基本模型。Laura Eboli等[2]通过限制摩擦系数、超高等条件,定义了驾驶安全域,再采集分析汽车的速度、加速度等运动参数来判断驾驶行为是否安全。Oussama Derbel 等[3]使用加速度范数和车辆速度提出了1 种基于驾驶员-车辆-环境信息的驾驶风险模型。M. Yamakado等[4]通过使用汽车加速度信息实验性地提取了纵向牵引力和转弯牵引力之间的权衡策略。徐进等[5-6]通过分析不同轴向加速度的峰值累计频率曲线、均方根值和特征分位值,得到了双车道公路和高速公路的行驶舒适性水平以及其影响因素。陈天幸[7]分析了人-车-路-环境系统中影响加速度的因素,提出了基于加速度的公路线性连续性的评价方法。谷海娇[8]建立了平、纵、横3 个方面的横向加速度变化率模型,对汽车的舒适性、安全性进行了分析。
研究互通立交匝道的文献中,Dominique Lord等[9]运用统计学的方法,建立了互通立交匝道和变速车道事故预测模型。Chen Hongyun 等[10]运用事故预测模型分析了立交匝道安全性与车道数之间的关系。Anne T.McCartt等[11]指出互通立交匝道是高速公路系统中事故率最高的区域。胡江碧等[12]认为主线和匝道的交通条件不同,并证实了人因工程理论适用于互通立交匝道的安全性评价。白浩晨等[13]提出了互通式立交出口匝道运行速度过渡段长度最小建议值及纵坡修正系数。林伟[14]、崔强[15]分别对互通立交匝道的横、纵向加速度的特性进行了研究,对横、纵向加速度与行驶速度的关系进行了聚类分析。窦同乐等[16]研究了车速、加速度均方根值、车辆载重以及道路附着系数对汽车安全性与舒适性的影响。张雪榆等[17]分析了驾驶员的性别、气质类型对于城市道路立交交织区微观驾驶行为的影响。
在上述文献中,对于汽车加速度的研究大多考虑的只是单一方向的加速度与速度的关系模型,而将横、纵、竖向加速度整合起来分析道路安全性的研究较少,特别是针对互通立交匝道的加速度整合特性研究、驾驶行为安全性研究以及立交匝道的断面风险研究的文献较少。基于此,为了提高互通立交匝道的安全水平以及行驶舒适性,有必要针对汽车的各向加速度进行整合分析。由于本文研究的互通立交匝道路面条件良好,竖向加速度对于汽车的运行状态影响不大,在此应用有效反映横、纵向加速度关系的G-G 图来明确汽车在互通立交匝道的驾驶行为和运行状态,并判断立交匝道风险段的大概位置。
1 实验设计
1.1 研究对象
重庆地形复杂,道路落差较大,大量的互通立交匝道为本文提供了丰富的实验对象。在此选取了重庆市主城区内2座具有代表性的互通立交展开了本次实验,共计4条迂回式匝道,见图1。1座是位于南岸区一天门与龙黄路相连的南山立交,选取的匝道N1和N2连接了南山茶园片区和内环快速路。另一座是位于学府大道的江南立交,选取的匝道为连接向黄路和海峡路的J1和J2。4 条匝道的各项技术指标见表1。

图1 实验立交匝道示意图Fig.1 Experimental interchange ramp

表1 实验匝道技术指标Tab.1 Technical index of the experimental ramp
1.2 实验车辆及仪器
本文研究内容为小客车的运行特征和安全性。根据观测,SUV 是公路和城市道路上的主要车型,相比于三厢小轿车,SUV质量较大、重心相对较高,更容易发生事故且事故后果更严重,因此选用SUV作为实验车辆,具体型号为北京现代全新胜达SUV。运用Speedbox车载测试系统输出实验车辆的行驶速度、三轴加速度,及经纬度等数据,采样频率为200 Hz。运用前向碰撞预警系统Mobileye 630通过CAN 总线实时读取车辆行驶速度、障碍物信息、车道线位置等数据,采样频率为10 Hz。以上2套系统均能有效采集汽车的行驶速度和横、纵向加速度等重要参数,2套系统的协同运作规避了单一系统测量时所造成的误差和数据丢失。同时,为了便于后期数据的处理和原因的分析,在实验车辆的前后各安装1台数字行车记录仪以全程记录实验过程发生的各种状况。见图2。
1.3 实验驾驶人员
实车驾驶试验共计有33 名身体状况良好的驾驶人员参与,其中男性驾驶员17 名,女性驾驶员16名。在实验之前以问卷调查的方式确定实验人员的年龄、驾龄、驾驶风格等相关信息,经过统计后可得知33 名驾驶人员年龄分布在26~51 岁,平均年龄38.4 岁,平均累计行驶里程行驶为25.88 万km,驾驶风格比例为愤怒型∶冒险型∶焦虑型=7∶19∶7,相关被试者信息见表2。
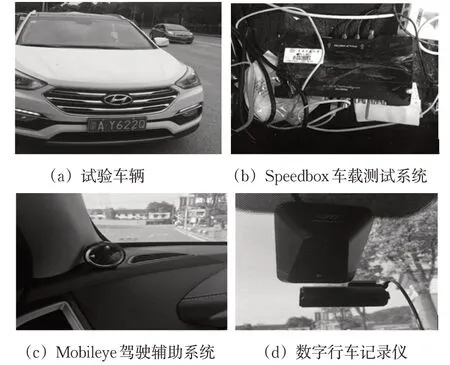
图2 实验车辆及仪器Fig.2 Experimental vehicles and instruments

表2 实验驾驶员基本信息Tab.2 Basic information of experimental drivers
1.4 实验流程与数据处理
本文的实验地点为重庆市南山立交和江南立交,实验时间段为09:00—18:00。为了获取互通立交匝道在自由流状态下的车辆运行数据,本次实验避开了早晚高峰时段,并且均在晴朗或阴天天气情况下进行。将各实验仪器调试完毕后,各驾驶员根据编号顺序按照提前规划的实验路线完成4条匝道的行驶任务,返回起点后每位驾驶员再在相同路径上继续行驶2~3圈,以完成对原始数据的采集。
剔除掉无效数据后,将原始数据导入系统进行后续处理。由于各实验设备的采样频率较高,当受到外界和系统噪声干扰以及通过下行匝道时GPS信号不稳定等因素的影响时,横、纵向加速度的统计结果出现了剧烈的震荡现象。为了更加直观准确地显示各项加速度的变化范围和趋势,在此选用Matlab中的Smooth函数对原始数据进行平滑滤波处理,处理后的结果见图3。

图3 加速度滤波处理示意图Fig.3 Acceleration filter processing
2 基于加速度的驾驶风险模型
踩制动、加速踏板和转动方向盘是构成驾驶行为的2个主要内容。横向加速度的变化与驾驶员转动方向盘的幅度和快慢有关;纵向加速度的变化与驾驶员踩加速和制动踏板有关。同时各项加速度的临界值与摩擦圆的边缘有关,即车辆轮胎特性与路面状况在不同场景之间的关系。车辆在立交匝道上行驶时,驾驶员根据自身的驾驶经验来感知前方路段的转弯风险,以此选择是以恒定速度继续行驶还是采取加速或者制动措施,此时汽车的稳定性主要取决于离心力的大小(横向加速度)以及行驶速度的高低(纵向加速度)。
本文通过G-G 图(见图4)来评估驾驶员在立交匝道上驾驶行为的安全性。图中横坐标表示横向加速度Ay,在一、四象限内Ay>0,代表汽车右转时产生的横向加速度;在二、三象限内Ay<0,代表汽车左转时产生的横向加速度。纵坐标表示纵向加速度Ax,在一、二象限内Ax>0,代表驾驶员采取了加速措施;在三、四象限内Ax<0,代表驾驶员采取了制动措施。参考Rosolino Vaiana 等[18]对驾驶风格图(DSD)模型的建立方法,将驾驶经验区域与约束条件下的摩擦圆重叠后可得G-G图中4个象限的安全区域界限(见图4外围封闭曲线)。
其中,一、二象限内安全区域界限的定义为


图4 驾驶行为G-G图Fig.4 G-G diagram of driving behaviors
图中封闭曲线所包络的范围表示在此区间的驾驶行为是安全的,封闭曲线包络的范围外部表示此时的驾驶行为是危险的。通过计算G-G图安全边界内外的百分比可知,在左转和右转的情况下,汽车的安全驾驶横向加速度和纵向加速度限值均为2.5 m/s2,纵向减速度限值为3 m/s2。因此可以通过判断某一时刻汽车横、纵向加速度在G-G 图中坐标点的位置来评估此时的驾驶行为是否安全。此外,在G-G 图的基础上,还可以通过比较从横、纵向加速度为0时的点(图表原点O)到某一时刻加速度点(见图4 点M)的直线距离与图表原点O到经过该加速点的直线延长至G-G 图安全边界曲线的交叉点(见图4 点N)的直线距离,来反映驾驶员的驾驶行为特征。在本文中,该指标定义为

由于立交匝道复杂的线性特征及驾驶员驾驶风格的多样性,因此即使是在G-G 图划定的安全区域界限内驾驶,部分驾驶员的驾驶行为也是具有侵略性的和存在安全隐患的。在此可以借助指标Ms来分析在G-G图中安全区域范围内驾驶员驾驶行为的激进水平,并在G-G图中安全边界内部引入1个新的区域(见图4内部虚线部分),定义该区域的Ms=0.5,以此划分不同驾驶员的驾驶行为区间。其中,驾驶行为安全的区间为0 ≤Ms≤0.5,驾驶行为存在隐患的区间为0.5<Ms≤1,驾驶行为危险的区间为Ms>1。
根据G-G 图安全边界以及指标Ms的定义,应用Matlab软件对实验匝道上每位驾驶人员行驶时的汽车横、纵向加速度进行了统计分析,并绘制出了表现每位驾驶员驾驶行为的G-G 图(部分驾驶员G-G图,见图5)。选取南山立交匝道N1上驾驶行为G-G图分析可以观察到,驾驶员D21 的行驶加速度坐标点均落在了安全边界的内部,表明该驾驶员的驾驶行为处于安全或者正常的状态,横、纵加速度的阈值均偏低,此时汽车具有良好的稳定性和安全性。驾驶员D2,D12,D18,D32 的行驶加速度坐标点分布较为离散,特别是汽车左转时的横向加速度较大,甚至部分坐标点位于安全界限之外,此时的驾驶行为是危险的,汽车在行驶过程中也存在着不稳定性和不舒适性,安全隐患较高。结合4条匝道分析可知,在立交匝道N1和J1上,驾驶员的行为点大部分均分布于安全边界的内部,此时诱发危险驾驶的主要因素是较高的横向加速度。而在匝道N2和J2上驾驶员的行为点很大一部分位于安全边界的外部,汽车在产生较大横向加速度的同时也产生了较大的纵向加速度。

图5 立交匝道驾驶员驾驶行为G-G图Fig.5 G-G diagram of driver's driving behaviors on the interchange ramp
3 立交匝道车辆运行特征
3.1 速度选择行为的差异性
根据驾驶员性别对其行驶速度进行分组,汇总每条匝道不同性别驾驶员的速度选择均值,并以速度作为检验变量进行独立样本t检验,结果见图6和表3。可以看出,不同性别的驾驶员在立交匝道的速度选择存在极显著性差异(P<0.01),4条匝道上男性驾驶员的速度选择普遍略高于女性驾驶员,其中整体速度均值相差2.02 km/h。
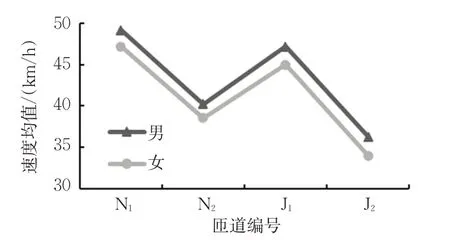
图6 不同性别驾驶员速度选择均值Fig.6 Average speed selection of drivers of different genders

表3 不同性别驾驶员t 检验结果Tab.3 T-Test results of drivers of different genders
同理,根据驾驶风格类型对行驶速度进行分组,汇总每条匝道不同驾驶风格驾驶员的速度选择均值,以速度为变量进行方差分析,可得结果图7和表4。可以看出3 种类型驾驶员的速度选择差异不明显,但冒险型驾驶员的速度选择普遍略高于愤怒型和焦虑型驾驶员。

图7 不同驾驶风格的速度选择均值Fig.7 Average-speed selection of drivers with different driving styles

表4 不同驾驶风格驾驶员方差分析结果Tab.4 Variance analysis results of drivers with different driving styles
3.2 加速度分布特征
将4条匝道上共计33名驾驶人员的行驶速度与加速度数据进行整合分析,利用Origin 显示了立交匝道上横、纵向加速度与行驶速度的分布特性,具体结果见图8。从图中可以发现,横向加速度与速度的分布近似于2 个三角形,其中汽车右转所产生的横向加速度峰值大于左转时的横向加速度峰值,左转匝道横向加速度峰值对应的行驶速度也高于右转匝道。通过分析可知,左转匝道N1和J1的转弯半径均大于右转匝道N2和J2,汽车在小半径匝道上行驶时的横向加速度值更大,驾驶员感知风险后采取了更为激烈的制动措施,行驶速度的降低也更快。纵向加速度与速度的分布近似于椭圆形,并随着速度的增加呈现先增后减的趋势,这是由于当速度增大到某1 个区间范围时,驾驶员感知风险的程度逐渐变大,所接受的纵向加速度阈值就逐渐变小。

图8 立交匝道汽车加速度-速度分布Fig.8 Distribution of acceleration and speed on theinterchange ramp
4 驾驶风险判别与分布特征
4.1 风险驾驶行为统计及判别
通过对32 位驾驶员在各个匝道上驾驶行为绘制的G-G 图进行观察,统计汇总每1 个G-G 图的汽车加速度分布点,并计算每1个加速度分布点的Ms值,以此确定不同驾驶员的驾驶行为区间分布情况,详细统计结果见图9。

图9 匝道N1驾驶行为区间分布情况Fig.9 Driving-behavior interval distribution on ramp N1
通过图9 可知,在匝道N1上,32 位驾驶员(排除驾驶员D4无效数据)出现危险驾驶行为的人员比例较高,共有26 名驾驶员出现了危险驾驶的情况,占比81.25%,主要集中于驾驶员D9~D15,尤其是驾驶员D10 和D15,其驾驶行为危险区间的占比均超过了50%。其余驾驶员的驾驶行为加速度分布点主要位于安全和正常的区间,危险驾驶行为的占比维持在较低的水平,其中驾驶员D7,D17,D21,D22,D26,D28等6名的驾驶行为分布点均位于G-G图的安全边界内部,不存在危险驾驶的情况。
根据实验驾驶员基本信息可知,在匝道N1上不存在驾驶风险的6 名驾驶员中有5 名为女性驾驶员(D17,D21,D22,D26,D28),而驾驶风险水平较高的驾驶员D9~D15 等7 人中有6 名男性驾驶员(D9~D14)、5名冒险型驾驶员(D9,D10,D12,D13,D14)。结合3.1对不同性别及不同驾驶风格驾驶员的速度选择差异性分析可知,在进入匝道时,由于男性驾驶员和冒险型驾驶员普遍选择了比女性驾驶员和其他驾驶风格类型驾驶员更高的行驶速度,导致进入匝道后汽车行驶速度偏高、横向加速度偏大、采取紧急制动措施造成的纵向加速度偏大,因此车辆的稳定性和安全性较低,驾驶行为分布点位于危险区间的比例较高,发生危险驾驶的概率较大。
为了分析立交匝道上不同路段的驾驶危险程度,因此对32名驾驶员的驾驶行为区间分布情况进行后续整理,将每1 名驾驶员驾驶行为G-G 图中的危险加速度分布点定位到与之对应的匝道里程中去,以此统计分析匝道上危险加速度分布点的数量和其占总点数的比例。考虑到实验匝道的里程以及实验仪器的精度等问题,为了避免测量误差的干扰,选用以10 m为断面间隔对匝道进行划分,详细统计结果见图10。图中横坐标表示匝道里程,以10 m为1 个间隔,例如550 代表匝道N1里程540~550 m的区段。左侧纵坐标表示每个区段所包含的危险点数量,以线状图呈现;右侧纵坐标表示各个区段对应的危险点数量占该匝道全部危险点数的比例,以柱状图呈现。

图10 匝道N1驾驶行为危险点统计Fig.10 Statistics of dangerous points of driving behaviors on ramp N1
由图10可见,匝道N1在后半段的危险点比例较高,其中500~530 m 路段的危险点数量最高,并在520~530 m 达到峰值,占比约为11%。为了确定立交匝道上危险驾驶行为分布情况,笔者进一步对所统计的每1个面里程的危险点数量占比进行如下划分:危险点数量占比<1%,为低风险路段;1%≤危险点数量占比≤3%,为中风险路段;危险点数量占比>3%,为高风险路段。
4.2 风险驾驶行为的匝道分布特征
根据上述对路段风险程度的划分标准,现将不同断面所代表的路段风险等级表现在实验立交匝道的俯视图上(见图11),以此直观观测实验匝道不同路段的风险程度。
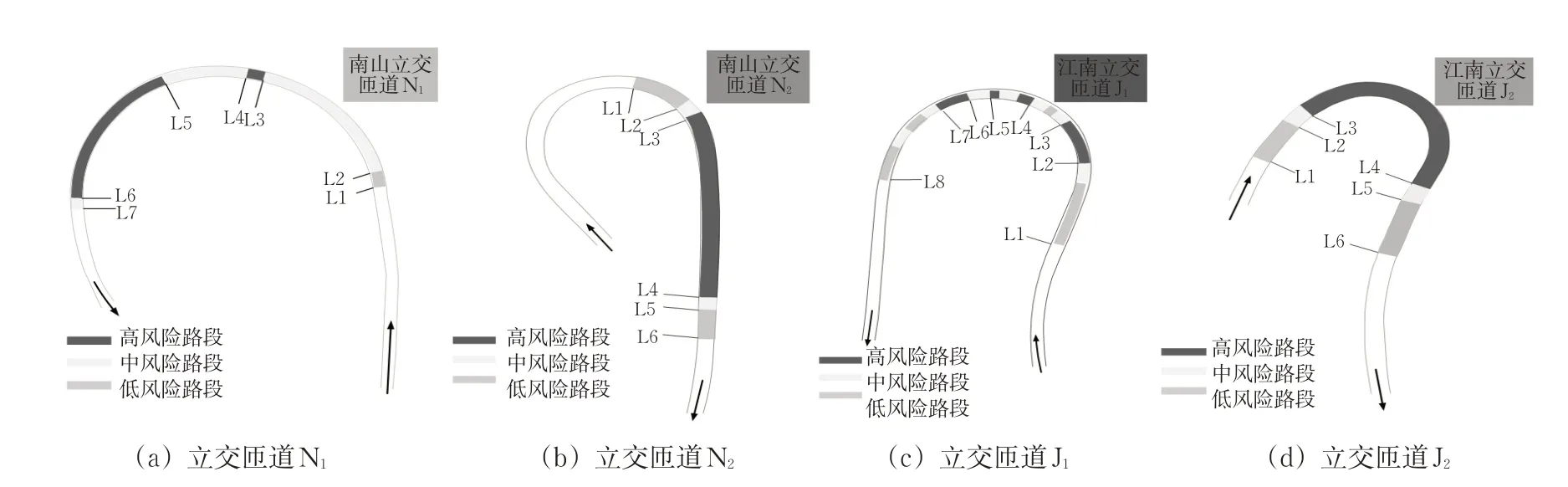
图11 立交匝道危险驾驶路段分布情况Fig.11 Distribution of dangerous driving sections on the interchange ramp
根据危险驾驶行为分布情况图可以得知,匝道N1上L1~L2 为 低 风 险 路 段;L2~L3,L4~L5,L6~L7 为中风险路段;L3~L4,L5~L6 为高风险路段。经过分析可知,汽车到达L2后进入匝道入弯段并开始左转,驾驶员往往会采取制动措施降低车速,此时的纵向减速度以及左转产生的横向加速度使得风险点的比例开始增高。L5之后的路段为匝道行驶出弯段,驾驶员在此阶段通常有加速出弯的驾驶特性,因此较高的横、纵向加速度使得L5~L6 路段的危险点比例大幅增加,造成了危险驾驶行为的高发。
同理,运用Matlab r2020a 对江南立交匝道J1和J2以及南山立交匝道N2作同等处理,3个匝道最终的危险驾驶行为分布情况见图11。统计分析后可知,匝道J1上驾驶员的危险驾驶行为占比较低,其中具有危险驾驶行为的12 名驾驶员中有11 名冒险型驾驶员和9名男性驾驶员。匝道J1在120~180 m路段的危险点比例较高,在130~140 m 路段达到峰值,超过了8%。高风险路段主要集中在L2~L3,L4~L5,L6~L7。其中L2~L3 为入弯减速路段,L4~L5 为弯道转弯路段,L6~L7 为出弯加速路段。结合行车记录仪所采集的视频信息进行分析,可以发现匝道J1的弯道路段上设有较多的振动标线,从而造成了该匝道的危险驾驶路段分布不均匀的现象。
匝道J2上几乎所有驾驶员都产生了较高的危险驾驶行为占比,且属于高风险路段的断面几乎覆盖了整个匝道的弯道曲面段和一部分的入弯、出弯缓和曲线段(L3~L4)。结合匝道技术指标以及路面状况分析可知,匝道J2的圆曲线半径较小,因此驾驶员进入匝道时立即采取了制动措施,汽车的行驶速度大幅降低。进入弯道后,驾驶员又采取了一定程度的加速措施,此时汽车加速所产生的纵向加速度和右转产生的横向加速度造成了弯道曲面段的危险驾驶行为。
曲线半径较小的匝道N2与J2类似,驾驶员的危险驾驶行为占比较高,平均约为40%,在130~250 m路段的危险点占比均超过了3%。但与其他匝道不同的是,匝道N2高风险路段主要集中于匝道的出弯段(L3~L4),而入弯段和弯道段却不存在中高风险路段。这是由于匝道N2入弯段缓和曲线较短,汽车进入匝道时的行驶速度较低。而出弯段为合流进入主线的直线段,驾驶的视野及行车条件较好,此时驾驶员通常采取了较为剧烈的加速措施,从而引发了危险驾驶行为的产生。
5 结束语
1)立交匝道上汽车横向加速度与速度的分布呈三角形,纵向加速度与速度的分布呈椭圆形。横、纵向加速度随速度增加呈现出先增后减的趋势。
2)汽车在小半径曲线匝道上的加速度峰值更高,分布更集中,由此可以考虑通过扩大立交匝道的圆曲线半径来降低危险驾驶行为的占比。
3)通过G-G 图以及指标Ms可以划分驾驶员的驾驶行为安全等级,并以危险驾驶行为点占比将立交匝道断面划分为高、中、低3种风险路段。
4)男性驾驶员和冒险型驾驶员在立交匝道上采取的加速或制动措施的频率更高,危险驾驶行为区间的分布更大。
5)立交匝道的高风险路段通常位于入弯减速段和出弯加速段。其危险驾驶行为产生的原因是汽车在匝道转弯行驶过程中受横向加速度的影响还未得到消除的情况下,驾驶员采取了激烈的制动或者加速措施。
加速度是分析驾驶行为的重要参数,它与驾驶行为之间存在着紧密的关联性。由于篇幅所限,本文仅对互通立交匝道中较为普遍的迂回式匝道进行了分析,选取的研究对象也仅限于小客车。在下一步研究中,笔者将会增加对S形、螺旋型等类型匝道的分析,并引入中大型车辆以及驾驶环境、驾驶员心理状态等参量来分析立交匝道上的汽车加速度与驾驶员驾驶行为的深层次关系。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
工会博览(2022年5期)2022-06-30
中国交通信息化(2021年2期)2021-07-22
中国交通信息化(2020年4期)2021-01-14
现代苏州(2019年18期)2019-10-15
中国外汇(2019年12期)2019-10-10
现代苏州(2019年16期)2019-09-27
建材发展导向(2019年11期)2019-08-24
中国交通信息化(2018年11期)2018-03-01
