基于SVM观测器的新异类故障检测方法及应用∗
2021-04-28 16:21杨世海吴佳佳顾伯忠
振动、测试与诊断 2021年2期
李 运, 杨世海, 吴佳佳, 顾伯忠
(1.中国科学院国家天文台南京天文光学技术研究所 南京,210042)
(2.南京天文光学技术研究所中国科学院天文光学技术重点实验室 南京,210042)(3.中国科学院大学 北京,100049)
引言
大口径光学红外望远镜是进行天体物理学研究、探索宇宙起源以及满足国家空天安全战略需求的核心手段。12 m口径光学红外望远镜(large optical telescope,简称LOT)是我国“十三五”期间优先布局的重大科技基础设施项目之一。为了更好满足视宁度好、光污染小等天文观测的前提条件,望远镜通常选址在高海拔、高寒以及人迹罕至的地区。望远镜故障已成为影响望远镜高效、可靠和无人自动观测的重要因素[1],故对天文望远镜驱动系统进行故障诊断策略研究具有深远的意义。
近年来,众多专家学者对功能各异设备的故障诊断技术进行了一系列研究。支持向量机结合相关技术在国内故障诊断领域取得了长足的发展[2-5],国外对此方面的研究也同样取得了丰硕的成果[6-8]。文献[9]提出一种改进的距离评估技术和自适应模糊推理相结合的故障诊断法,并将其应用在滚动轴承的故障诊断中且取得了良好的效果。神经网络与诸如多特征信号识别技术、特征评估技术、数据挖掘技术等相结合的方法进行相关设备的故障诊断,并取得了相应的成果[10-11]。但是,目前神经网络诊断效率和稳定性还有待提高,加之其“黑盒效应”本身就可能导致非预期结果,故该方法并不适用于文中的研究对象。基于专家系统的故障诊断方法经过半个多世纪的发展已成长为较为成熟的技术,且在故障诊断领域充分发挥了其优势[12],但专家系统本身存在的自学习能力不足、过于依赖经验等缺点限制了其发展。Kordestani等[13]介绍了一种应用在多功能扰流板上的故障诊断方法,该方法融合了人工神经网络和离散小波变换以实现诊断系统的可靠性和快速性。深度学习相关技术同样被应用于设备的故障诊断,并通过实验的方法验证了其良好的诊断性能[14-15]。
现有故障诊断方法通常对样本缺失、先验信息不足的新异类故障束手无策,受限于信息采集、特征描述和处理方法,此类故障通常难以被快速的判别。为解决上述问题,胡雷等[16]构建了单类支持向量机检测器,用于对涡轮泵传感器的新异类检测,且证明了该方法的有效性。杜文辽等[17]提出了一种基于支持向量机数据描述和K均值聚类相结合的新异类故障诊断框架。徐兴等[18]设计了最优未知输入观测器对系统状态进行估计。Markou等[19-20]综述了新异类检测方法,包括信号处理、模式识别、数据挖掘和机器人技术等。Vanevery等[21]提出了一种基于机器学习产生预测概率模型的新异类检测方法,并将其应用于暖通空调系统中。
望远镜驱动系统是保证天文观测顺利进行的关键所在。目前望远镜多工作于自然环境恶劣、人迹罕至的地区,故障检测又受到了远程效率低、预警机制不完善等因素的制约,加之新异类检测遭遇的故障样本缺失、先验信息不足等问题,因此笔者通过基于支持向量机状态观测器的故障检测方法完善新异类检测技术,提高未知异常检测效率。该方法可为我国未来12 m望远镜故障诊断及自愈子系统的构建提供技术支持,同时对其他天文仪器的设计与研发也具有重要的指导意义。
1 望远镜驱动系统与诊断原理
1.1 望远镜驱动系统
笔者以天文望远镜驱动系统为研究对象,对其可能引起驱动系统异常的结构进行分析。望远镜驱动系统被控对象主体结构分为高度轴驱动子系统、方位轴驱动子系统和调焦驱动子系统,每个轴均由独立的伺服驱动系统加以控制。文中以第3台南极巡天望远镜(antarctica survey telescope,简称AST3-3)为例,如图1所示。驱动系统主要由运动控制器、伺服驱动器、伺服电机和位置传感器等组成,控制方式采用位置环、速度环和电流环组成的三环反馈控制。

图1 AST3-3驱动系统Fig.1 The drive system of AST3-3
望远镜长年工作在人烟稀少的高海拔地区,故障及时判断可通过实时监测数据进行,一方面可避免故障对望远镜造成的不可逆伤害,另一方面也节省人力、物力和财力成本。人为地进行各项参数的判别是不现实的,基于机器学习的故障诊断方法为从历史数据中挖掘隐藏的故障信息提供了新思路。
运行参数是判断望远镜是否处于正常运行状态的重要指标。电力系统是设备运转必不可少的,故电压、电流和功率是需要监测的首要指标。负载异常激增会引起电流激增进而威胁电机安全,故阈值电流和阈值功率也是需要考虑的因素。望远镜是精密传动系统,其跟踪位置、跟踪速度、跟踪加速度和跟踪误差也是需要监测的重要指标。作为并行工作于驱动系统的新异类故障检测系统而言,及时判断系统是否故障并停机可保证望远镜的安全运行。
1.2 支持向量机
支持向量机是一种以统计学理论、VC维(vapnik-chervonenkis dimension,简称VC维)理论和结构风险最小化理论为基础的机器学习方法[22-23]。随着机器学习理论和故障诊断学理论的发展,更多的方法被应用于设备故障诊断,并取得较好的应用效果。
基于SVM理论的诊断方法核心在于分类,保证经验风险最小的前提下,将测试数据中的故障数据以最快的速度检测出来,实现正常数据和故障数据的分离。为实现正常数据和故障数据的分离,将n维样本数据映射到一个超平面,在超平面中寻求输入与输出的非线性关系。通过支持向量的线性组合可得最优分类面函数为

但对于非线性分类问题,空间映射通常采用核函数实现,通过引入点积核函数K

即原始空间的内积。则相应的分类函数转化为
分类函数将所有样本数据分为正常数据和异常数据,新异类故障检测即故障数据的检测。
2 新异类故障检测原理
2.1 新异类故障状态观测器模型
基于SVM建立望远镜驱动系统的新异类故障状态观测器,将训练好的模型接入望远镜控制系统。状态观测器的输入即为驱动系统的状态参数,用观测输出和系统的实际输出在决策机(decisionmaking machine,简称DMM)中做最终决策,将诊断结果输出。
状态观测器的建立以SVM模型为平台,以系统数据为依据,以DMM为准绳,最终判断系统的运行状态。笔者以龙贝格(Luenberger)状态观测器为模型依据,建立适用于望远镜驱动系统的故障状态观测器。状态观测器设计如图2所示,图中:u和y分别为系统的输入和输出;out为诊断结果;TCS(telescope control system,简称TCS)为望远镜控制系 统模块;FRS(feedback regulation system,简称FRS)为反馈调节系统模块。
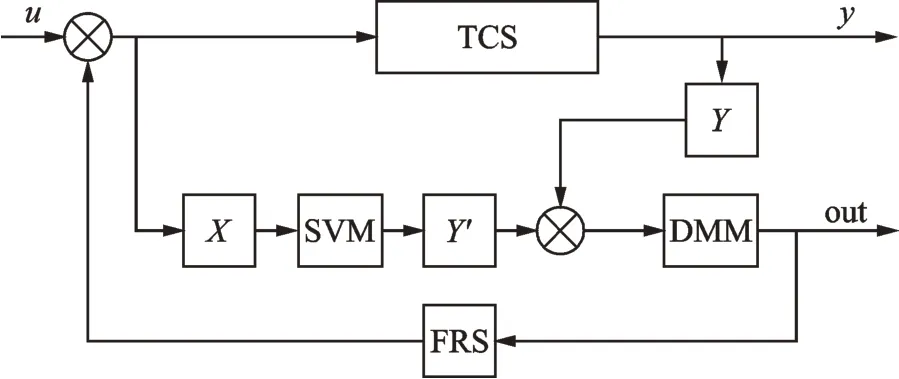
图2 故障状态观测器模型Fig.2 Fault state observer model
由图2可知,系统的状态参数X即样本数据,经基于SVM的网络模型进行训练得到系统预测输出样本集Y',系统的实际输出状态参数为Y。
望远镜驱动系统复杂,涉及参数众多,文中假设其可以由式(4)描述

其中:X(t),Y(t),U(t),f(t)分别为连续系统的状态向量、输出向量、输入向量和故障向量分别为系统预估状态向量、输出向量和故障向量。令输出误差为


其中:e0(t)为置信上限。
当系统输出误差大于置信上限时,DMM输出结果Fmodel为1,表示系统此时处于故障状态;反之输出结果为0,表示系统处于正常运行状态。
假设训练数据和测试数据均满足多元正态分布,即

其中:μz和Σz分别为训练数据的均值和方差。根据残差公式求得检测残差

记χ2(z)=rTΣ-1z r,又 因χ2(z)∼χ2(nz)。设 显著性水平为α,χ21-α(nz)是自由度为nz的χ2分布对应于(1-α)的分位数,即

因为χ2(z)始终为正值,故对应的置信上限为

2.2 诊断原理
基于SVM状态观测器的故障诊断系统平行运行于望远镜控制系统。首先,观测器利用驱动系统历史运行数据作为其训练样本,对SVM模型进行训练,将训练好的模型作为观测器的输入数据处理中心;其次,观测器利用驱动系统的输入作为输入,观测器分类结果作为其输出;最后,将驱动系统的实际输出数据和观测器的观测输出数据送给故障决策机,DMM利用决策算法判断该结果是否处于置信区间内,从而判断故障是否已经发生或即将发生。
基于SVM状态观测器的望远镜故障诊断原理如图3所示。
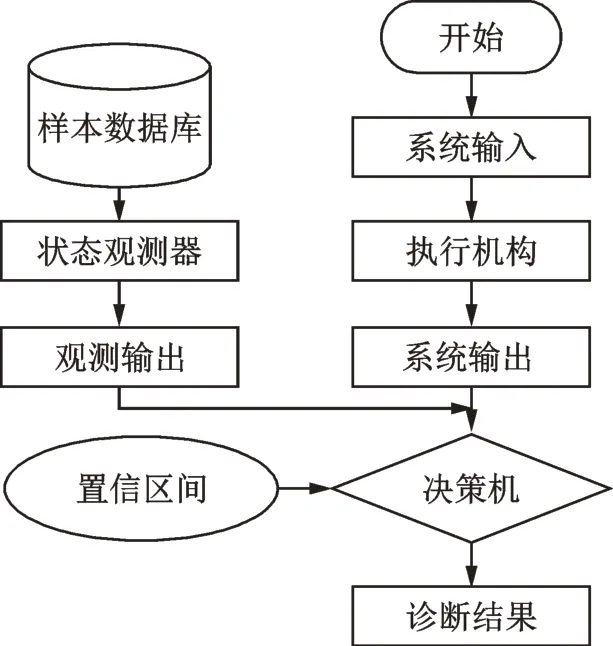
图3 故障诊断原理图Fig.3 Schematic diagram of fault diagnosis
3 实验与结果
3.1 数据的选取及预处理
新异类故障检测所需样本数据通常要包含正常数据、故障临界数据和故障数据。鉴于目前12 m望远镜没有现成的运行数据可供参考,故文中采用样本数据均来自南极巡天望远镜AST3-3于2017年4月在南京大桥机械厂低温试验车间。12 m望远镜和南极望远镜同样运行在高海拔、低温、强紫外线等恶劣的自然环境中,加之二者运行机制及控制方式存在很大的相似之处。故南极望远镜的运行参数对于验证笔者提出的故障检测方法具有一定的参考价值。
截取实验数据1 000组作为SVM模型训练样本数据,50组作为测试样本数据。每组样本数据包含望远镜运行的8种参数,分别是望远镜单轴运行时的位置、速度、加速度、跟随误差、电压、电流、功率和减速比。训练样本数据的选取直接关系到观测器模型的好坏,故原则上训练样本数据覆盖范围越广诊断正确率越高。本研究选取的样本数据均满足上述条件,其数据特征如图4所示(图4,5中的横坐标均表示无量纲单位)。
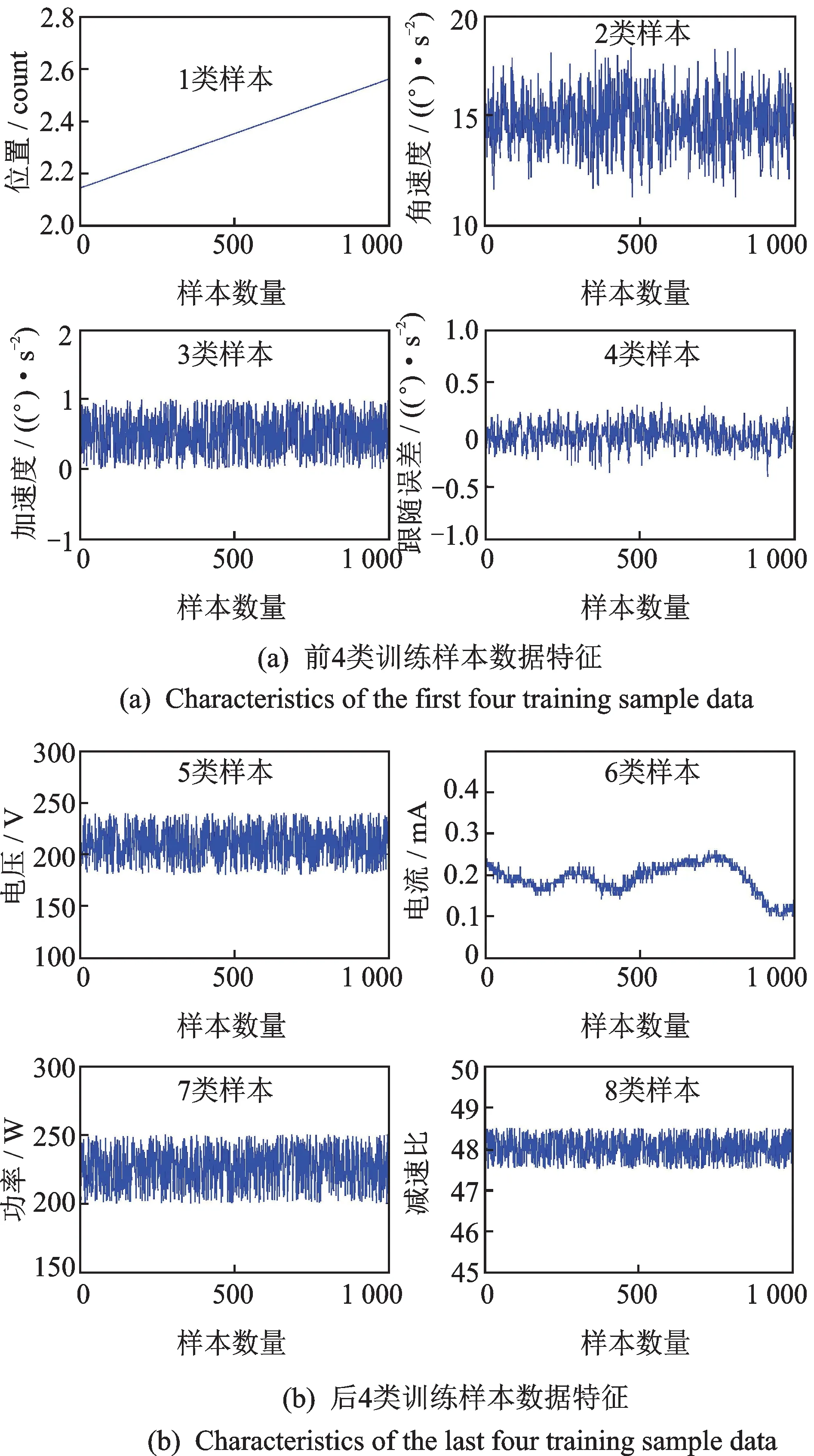
图4 训练样本数据特征Fig.4 Characteristics of training sample data
上述样本数据特征总体可分为两大类:平稳数据和非平稳数据,其中1类样本和6类样本属于非平稳数据,如图5(a)所示。基于支持向量机的训练网络对于平稳数据具有良好的训练效果,但对于非平稳数据训练时容易导致故障信息,可能会被正常的非平稳的宽幅趋势所掩盖,导致检测率显著降低[24]。故文中对非平稳信号的光滑非平稳趋势和非光滑平稳残差进行提取,以获得支持向量机网络最优训练效果。趋势和残差提取结果如图5(b)所示。
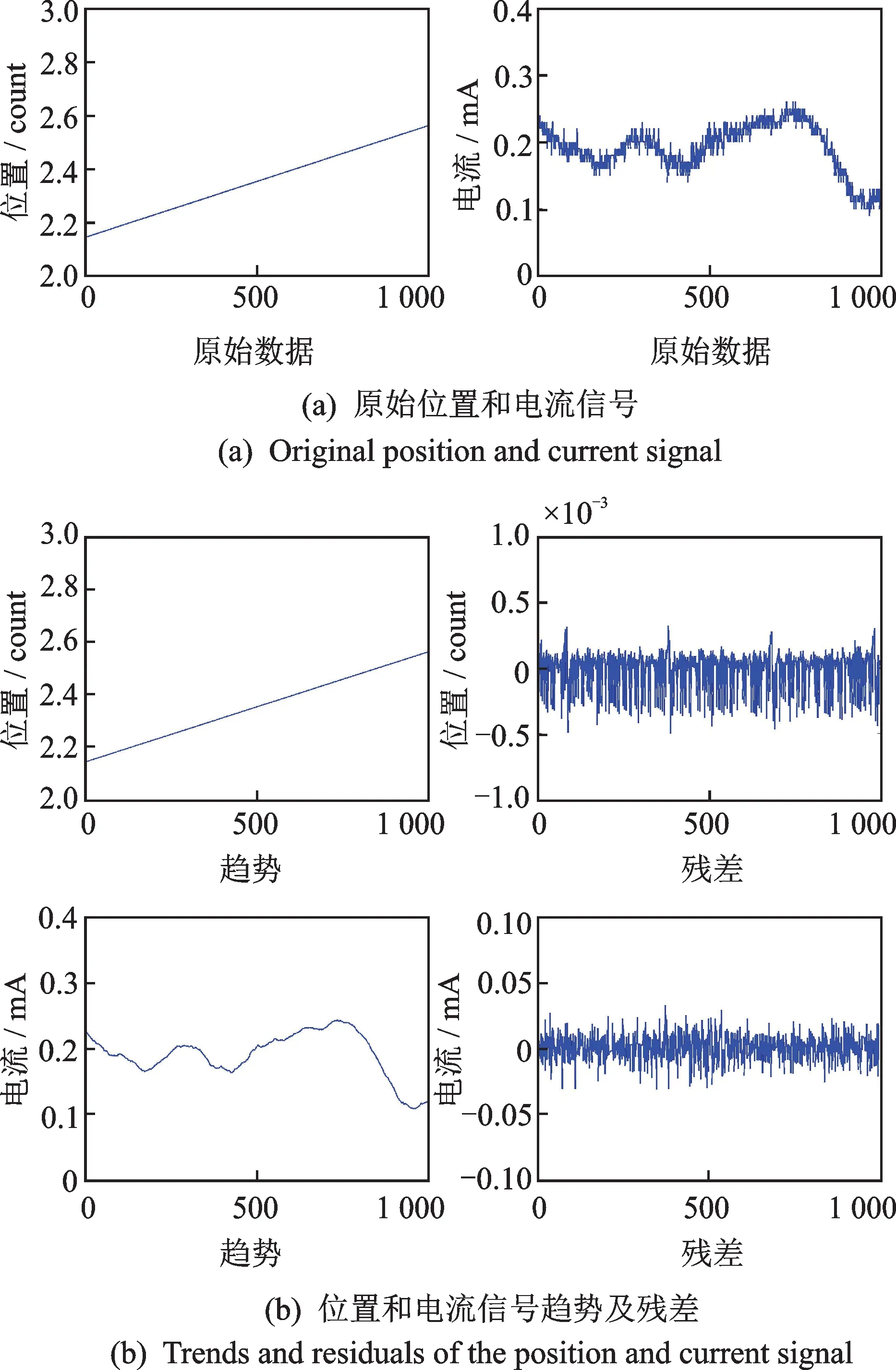
图5 原始位置和电流及其趋势和残差Fig.5 Original position and current and their trends and residuals
其中,一类样本表示经光栅码盘测得的望远镜位置,单位是码盘计数值count。文中实验采用的码盘刻线数为40 000,码盘旋转一周输出40 000个脉冲。为提高望远镜的测角精度和分辨率,控制器中的细分模块将光栅输出的原始信号进行了4 096细分,计算可得码盘运动一周的总计数值。
3.2 实验结果分析
为验证该方法的可行性,将其应用在故障诊断及自愈半物理仿真平台进行测试。该平台主要用于天文望远镜控制系统的故障诊断及智能自愈测试实验。该平台主要由故障模拟控制箱和故障诊断及自愈控制箱两部分组成。
经样本数据对SVM观测器的训练,对测试样本数据进行新异类故障检测,得出预测分类结果。SVM观测器故障预测值和实际值对比如图6所示(图6,8,9中横、纵坐标均为无量纲单位)。
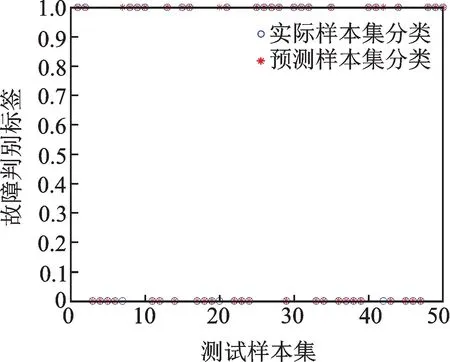
图6 SVM观测器检测结果Fig.6 The result of observer based on SVM
半物理仿真平台的诊断结果如图7所示,若系统判断出故障组数据,即观测器判断此时驱动系统故障,则继电器吸合且对应指示灯亮。
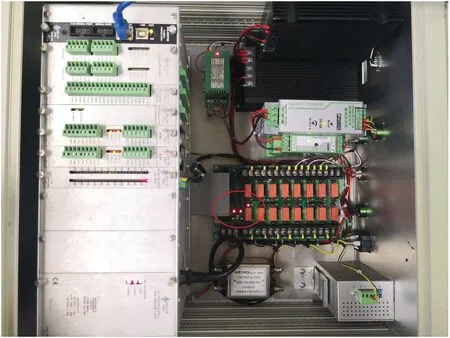
图7 仿真平台诊断结果Fig.7 Test results on simulation platform
由图6可知,故障状态观测预测结果只有一组和实际结果不符,即观测器对该组数据判断有误。但从总体结果可知,检测正确率可达94%,平均用时0.047 s。重复上述操作10次,检测结果均未变化,证明该观测器稳定性好,但正确率仍存在提高空间。
为突出基于SVM观测器的新异类故障检测方法的优越性能,文中还对比了基于BP神经网络和基于RBF神经网络观测器的检测结果(神经元个数设为10),其中各10次的检测结果分别如图8和图9所示,平均正确率为85.5%和58.0%,平均耗时为7.628和1.985 s。3种不同方法观测器的诊断性能结果对比如表1所示。
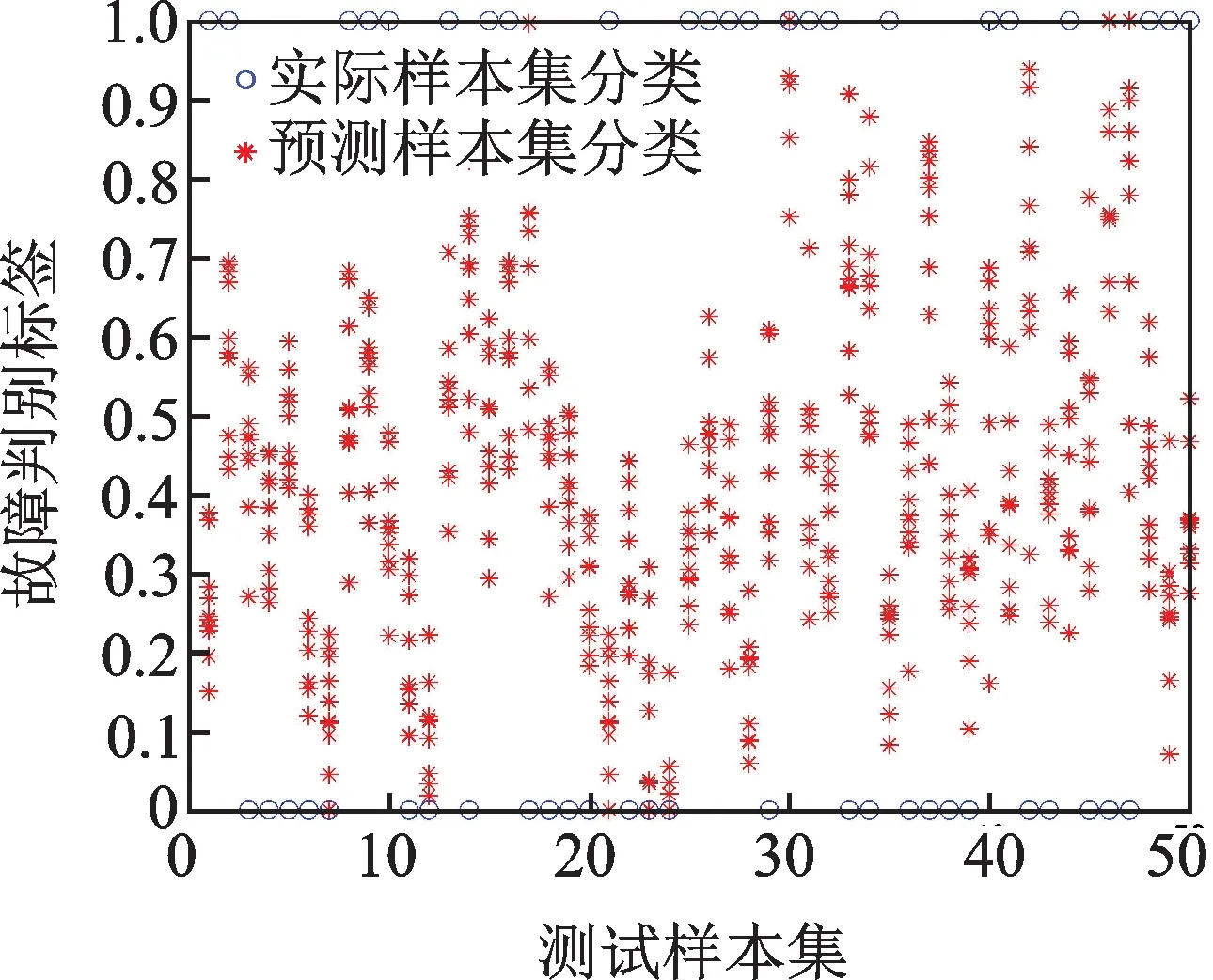
图8 BP神经网络观测器检测结果Fig.8 The result of observer based on BP
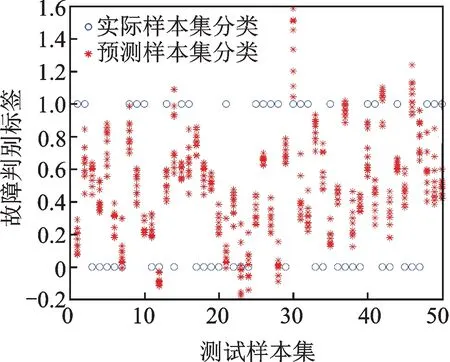
图9 RBF神经网络观测器检测结果Fig.9 The result of observer based on RBF
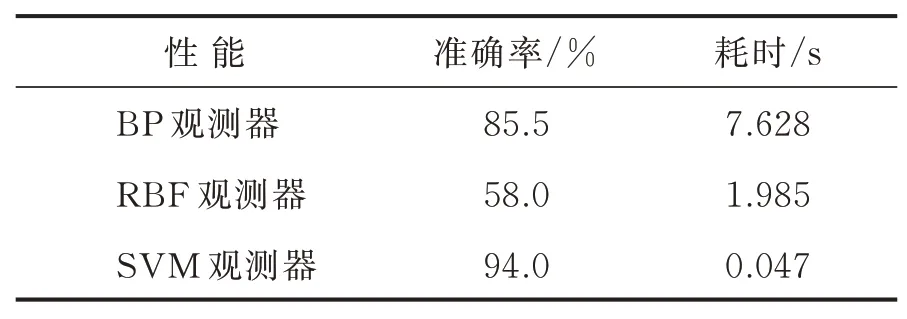
表1 基于BP,RBF,SVM观测器诊断性能对比Tab.1 Comparison of diagnostic performance based on BP,RBF and SVM observer
4 结束语
笔者以望远镜驱动系统为研究对象,引用基于SVM状态观测器的新异类故障检测方法,建立了通用SVM状态观测器模型。并利用望远镜运行数据为样本对该方法进行了验证,结果表明基于SVM状态观测器的新异类故障检测准确率可达94%,平均用时0.047 s。该结果与基于BP,RBF状态观测器检测准确率85.5%,58.0%、用时7.628 s,1.985 s相比,表明该方法对望远镜驱动系统新异类故障检测的准确率和效率明显优于其他两种同类方法。该方法可远程独立工作于望远镜驱动系统,可实时监测望远镜驱动系统的运行状况,一旦检测到望远镜运行异常,及时停机以免造成不可逆故障的发生。该方法可为12 m望远镜驱动系统故障检测提供技术支持,同时对我国现有天文望远镜以及未来天文仪器健康管理系统的研发都具有实质性的意义。本研究仍存在不足之处:①由于样本数据区域覆盖有限,加之观测器设计仍需进一步优化,导致笔者提出的基于SVM状态观测器的新异类故障检测方法目前仍存在误差;②笔者提出的新异类故障诊断方法只能宏观判断故障,不能微观定位故障,这将是今后的研究工作计划。
猜你喜欢
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
防爆电机(2020年4期)2020-12-14
中学生数理化·八年级物理人教版(2018年11期)2019-01-31
小哥白尼(趣味科学)(2018年6期)2018-09-14
摄影之友(影像视觉)(2017年12期)2017-02-08
儿童故事画报·智力大王(2015年12期)2016-01-23
儿童故事画报·智力大王(2015年9期)2016-01-03
铁道科学与工程学报(2015年5期)2015-12-24
儿童故事画报·智力大王(2015年6期)2015-08-17
电测与仪表(2015年19期)2015-04-09