异构作动系统的效率特性与能量管理分析
2021-04-26 06:54周国峰韩文博李迎博刘珺怡
导弹与航天运载技术 2021年2期
胡 骁,周国峰,韩文博,李迎博,刘珺怡
(中国运载火箭技术研究院,北京,100076)
0 引 言
随着飞行器对可靠性和经济性的要求日益提高,异构作动系统得到越来越多的应用,该系统由一个液压作动器(Hydraulic Actuator,HA)和一个电动静液作动器(Electro-hydrostatic Actuator,EHA)构成。由于该作动系统中液压作动器和电动静液作动器具有不同的输入能源和不同的工作原理,导致效率特性不同。因此,亟需针对该作动系统,对效率特性与给定工况的对应关系开展研究,提出适宜的能量管理策略。
1 异构作动系统的基本组成
异构作动系统示意如图1所示[1~6]。HA主要由恒压源、控制器、伺服阀和液压缸组成[7]。恒压源为HA提供液压动力。控制器的输入信号为位移指令信号和位移反馈信号,通过控制算法,输出伺服阀的控制电流信号,调节伺服阀的阀开口,进而调节通过伺服阀的流量。液压缸与伺服阀相连,将净流量转化为压力的变化量,驱动舵面完成指定的工作,见图2。
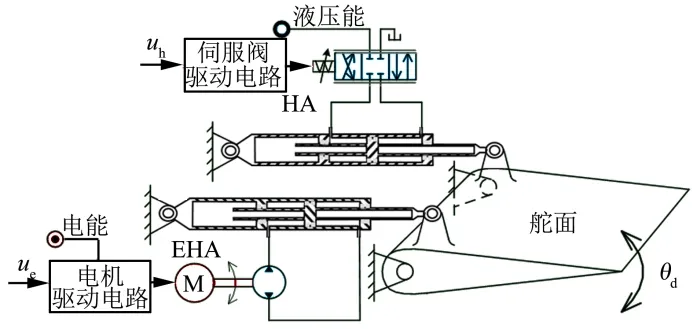
图1 异构作动系统示意 Fig.1 Schematic of Dissimilar Redundancy Actuation System

图2 HA原理示意 Fig.2 Schematic Diagram of HA
EHA由电机、液压泵、液压缸和电控单元组成[8],见图3。输入信号与各反馈信号在控制器里按控制律进行计算后转变为电控信号,经驱动电路放大为功率电信号,由功率电信号驱动的电机带动液压泵旋转,最终由液压泵输出的压力油驱动舵面进行工作。
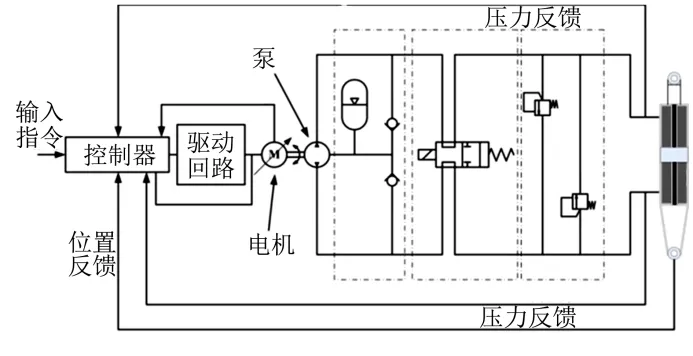
图3 EHA原理示意 Fig.3 Schematic Diagram of EHA
2 异构作动系统的效率特性分析
2.1 HA与EHA效率的定义
本文将作动器效率定义为稳态时输出功率与输入功率的比值:

式中η为作动器效率;Pout为作动器的输出功率;Pin为作动器的输入功率。
考虑 HA的输出功率,其输出功率的形式是机械功率:

式中F为HA的外负载力;v为HA的活塞杆运动速度。
考虑 HA的输入功率,其输入功率的形式是液压功率:

式中Pin为 HA 恒压源压力;Qin为流经伺服阀的流量。为降低计算难度,此处忽略 HA中的液压泵和调压系统的功率损失。
考虑EHA的输出功率,其输出功率的形式是机械功率:

式中F为EHA的外负载力;v为EHA的活塞杆运动速度。
考虑EHA的输入功率,其输入功率的形式是电功率:

式中PinEHA为 EHA的输入功率;U为电机的输入电压;i为电机的电枢电流。
2.2 Matlab/Simulink与AMESim联合仿真
综合考虑Matlab/Simulink与AMESim在数学仿真中的优势,设计以下仿真策略:在Matlab/Simulink中完成工作点的设定以及数据记录的功能,在 AMESim中完成HA与EHA的仿真功能,见图4。

图4 联合仿真示意 Fig.4 Schematic Diagram of Co-simulation
a)关键参数设置。
HA和EHA的性能指标见表1,HA的关键参数见表2,EHA的关键参数见表3。

表1 性能指标 Tab.1 Performance Index

表2 HA关键参数 Tab.2 HA Key Parameters
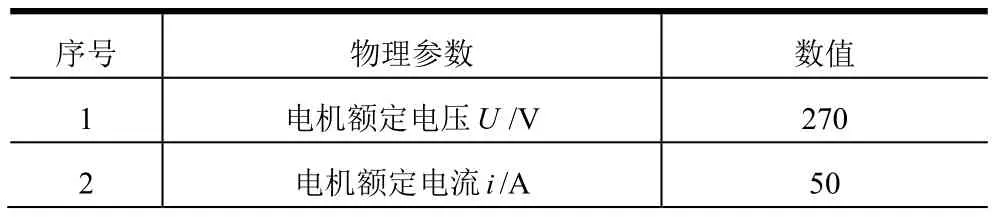
表3 EHA关键参数 Tab.3 EHA Key Parameters
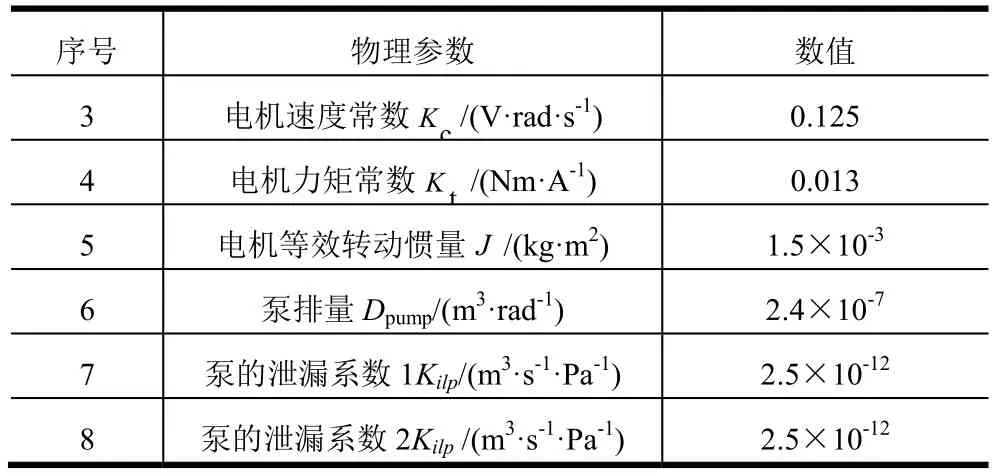
续表3
b)工作点的设定。
为尽可能准确的得到HA与EHA的效率特性,应在计算成本允许的条件下,尽可能多的设定工作点,与此同时,考虑到速度在零值附近变化较为剧烈,因此设计以下工作点选取方案:
1)考虑速度v,在 0~2 mm/s之间,每隔 0.5 mm/s设置一个工作点,在2~100 mm/s之间,每隔2 mm/s设置一个工作点;
2)考虑负载力F,在 0~40 000 N 之间,每隔800 N设置一个工作点。
3)仿真结果与分析。
在给定参数,给定工作点的条件下,HA的效率特性见图5,EHA的效率特性见图6。

图5 HA效率特性示意 Fig.5 Schematic Diagram of HA Efficiency Characteristic

图6 EHA效率特性示意 Fig.6 Schematic Diagram of EHA Efficiency Characteristic
对图5及图6进一步处理,获取HA与EHA的效率对比示意图,见图7,曲线下方,EHA的效率高于HA的效率;曲线上方,HA的效率高于EHA的效率。从图7中不难发现,在大多数工况下,EHA的效率均高于HA的效率,但当负载力大于35 000N时,HA的效率高于EHA的效率。

图7 HA与EHA效率对比示意 Fig.7 Schematic Diagram of Efficiency Comparison Curve
3 HA与EHA的能量管理策略
3.1 基于切换机制的能量综合管理策略
以活塞杆速度为X轴,以负载力为Y轴,确定异构作动系统的四象限工作模式,见图8。当作动系统处于一、三象限时,作动系统做正功;当作动系统处于二、四象限时,作动系统做负功,见图8。由于结构的限制,HA很难回收能量,而EHA中电机可工作在发电机状态,存在回收能量的可能,因此,在顺载状态下,应旁通HA,让EHA工作,回收能量[9,10]。
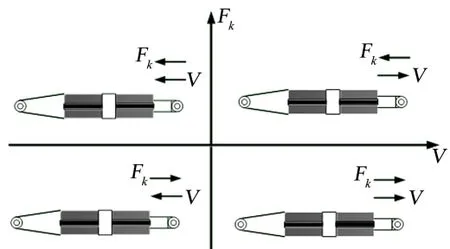
图8 异构作动系统四象限工况示意 Fig.8 Schematic Diagram of Dissimilar Redundancy Actuation System Work Mode
在此基础上,本文提出了一种全新的异构作动系统的工作模式:当作动系统处于顺载工况时,EHA工作,HA旁通;当作动系统处于逆载工况时,EHA常态工作,HA旁通,仅当负载力达到切换条件时,HA工作,EHA旁通。
3.2 仿真结果分析
3.2.1 仿真工况设计
指令信号示意如图9所示。位移指令分5个阶段(见图9a):第 1 个阶段是 0~4 s,位移指令以 10 mm/s的速度上升;第 2个阶段是 4~8 s,位移指令以 40 mm/s的速度上升;第3个阶段是8~27 s,位移指令维持不变;第4个阶段是27~31 s,位移指令以40 mm/s的速度下降;第5个阶段是31~35 s,位移指令以10 mm/s的速度下降。假设负载力为弹性负载,即负载力与位移成正比例,故负载力指令也分5个阶段(见图9b),与位移指令相对应。

图9 指令信号示意 Fig.9 Schematic Diagram of Input Signal
3.2.2 仿真结果分析
对于异构作动系统而言,在不考虑故障的情况下,存在3种工作模式:HA单独工作(定义其为模式1);EHA单独工作(定义其为模式2);以及本文提出的全新工作模式(定义其为模式 3)。3种模式的仿真结果分别见图10至图12。
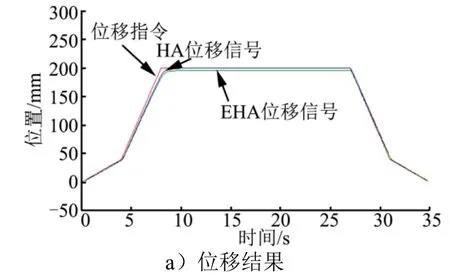
图10 模式1仿真结果 Fig.10 Simulation Result of Model 1
续图10

图11 模式2仿真结果 Fig.11 Simulation Result of Model 2

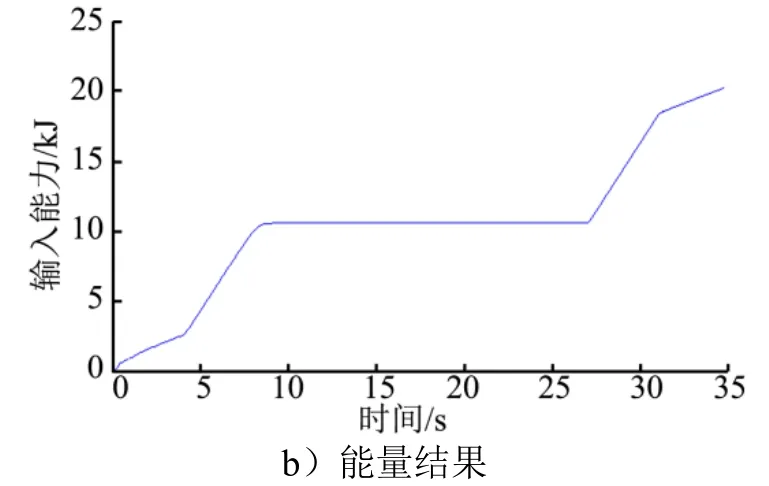
图12 模式3仿真结果 Fig.12 Simulation Result of Model 3
输入能量方面,模式3较模式1和模式2有明显优势,模式3输入能量仅7570 J,模式1输入能量为20 300 J,模式 2 输入能量为 17 100 J;位移跟踪曲线方面,模式3较模式1和模式2有明显劣势,在7.3 s时,模式3中异构作动系统发生从状态1(EHA做控制,HA旁通)到状态2(HA做控制,EHA旁通)的切换,位移跟踪曲线出现明显“抖动”现象,在 27 s时,模式3中异构作动系统发生从状态2到状态1的切换,位移跟踪曲线也出现了明显的“抖动”现象。
4 结 论
对HA和EHA组成的异构作动系统进行研究,得到结论如下:a)在大多数工况下,EHA的效率均高于HA的效率,但当负载力大于35 kN时,HA的效率高于EHA的效率;b)提出一种基于效率特性的切换管理策略,即当作动系统处于顺载工况时,EHA工作,HA旁通;当作动系统处于逆载工况时,EHA常态工作,HA旁通,仅当负载力达到切换条件(大于35 kN)时,HA工作,EHA旁通;c)选取位移跟踪特性和能耗特性为评价指标,分析表明:本文提出的能量管理策略在能耗特性方面有较大的优势,但在位移跟踪曲线上出现了“抖动”的现象,即在控制平稳性方面,表现出一定的不足。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
计算技术与自动化(2022年2期)2022-07-04
小学教学研究(2022年5期)2022-04-28
北京航空航天大学学报(2022年2期)2022-03-08
汽车实用技术(2021年17期)2021-09-23
汽车观察(2021年4期)2021-05-10
学校教育研究(2020年11期)2020-06-08
航空科学技术(2019年2期)2019-09-10
福建基础教育研究(2019年11期)2019-05-28
汽车博览(2018年12期)2018-12-08