新能源采用同步电机对(MGP)并网暂态稳定性研究
2021-04-24 10:44谷昱君黄永章杨鑫付文启陈巨龙赵海森
南方电网技术 2021年3期
谷昱君,黄永章,杨鑫,付文启,陈巨龙,赵海森
(1.华北电力大学电气与电子工程学院,北京102206;2. 贵州电网有限责任公司电网规划研究中心,贵阳550002)
0 引言
大力发展新能源以解决环境污染和能源短缺问题已成为各国共识[1]。而随着新能源发电占比逐步提高,其不同于传统同步机组的运行特性对同步机组稳定运行的影响不断增大,甚至给电力系统安全稳定性带来了新的问题[2]。因此,研究新能源发电对电力系统暂态稳定的影响具有重要的意义。
新能源并网会降低电力系统的频率和电压稳定性。针对频率稳定性方面,由于风电和光伏并网不具备惯性响应能力[3],使电力系统的频率稳定性下降。一方面,为使风力机储存的旋转动能得到利用,文献[4]提出了基于电网频率变化率反馈的附加惯量控制,可以在电网频率变化时释放转子动能提供惯性响应。但是,在转速恢复的过程中会出现频率二次跌落问题[5]。另一方面,可以通过新能源降功率运行和附加储能装置的方式提供备用容量,在电网频率变化时采用虚拟惯量控制策略提供所需的惯性响应[6 - 7]。此外,由于不具备励磁和阻尼装置,新能源并网会使电力系统的阻尼水平下降,因此需要提供额外的能量用于附加阻尼控制[8 - 9]。针对电压稳定性方面,由于变流器耐压、耐流能力较低,在电网故障情况下新能源电场易发生大规模脱网事故,而且新能源变流器无功控制能力较小,无法提供足够的电压支撑[10]。为解决上述问题,很多方法被用于减小过压过流对变流器的影响,如灭磁控制[11]、正负序电压定向控制[12]等改进控制策略,附加Crowbar电路、直流chopper电路、储能等硬件辅助设备[13]。STATCOM、SVC、SVG等无功补偿设备也广泛用于提升新能源场站的无功支撑能力[14]。
上述方法虽然在一定程度上有助于提升新能源并网的频率和电压稳定性,但是却增加变流器控制的复杂度和新能源电场的运行成本,在技术上也不如传统机组成熟。新能源通过同步电机对(motor-generator pair, MGP)并网不仅保留了同步电机良好的惯性响应、阻尼特性和励磁控制,还通过机械轴的隔离作用保护了新能源电场不受电网故障的影响[15 - 16]。文献[17]建立了MGP系统的小信号模型,分析了不同下新能源并网场景下MGP对于提升新能源并网频率稳定性的提升作用。文献[18 - 19]对比MGP与传统机组的转动惯量和阻尼比的大小,说明MGP可以为新能源提供足够的惯量和阻尼。但是,上述研究并未针对MGP系统的惯性、阻尼等参数对于新能源频率稳定性的影响做具体分析。
本文首先介绍了新能源经MGP并网系统的结构及控制方法。然后,将新能源和MGP作为一个并网单元进行建模,根据模型特点得到影响系统暂态特性的关键参数。在此基础上,分别分析了不同参数对系统暂态过程的影响程度。在仿真中设置电压故障,对比不同参数下系统的频率和有功响应,结果表明通过参数的优选可以提升系统的暂态稳定性。最后,在新能源经MGP的实验平台中设置了不同的暂态扰动,实验结果表明MGP有利于提高新能源的暂态稳定性。
1 新能源采用MGP并网系统建模
1.1 新能源采用MGP并网结构及控制方法
考虑不同新能源并网方式的差异,目前光伏和直驱式风机经MGP并网在工程实际中的应用较为可行。两者具有相同的并网结构,即直流母线电容和并网逆变器构成的直-交变换单元,这种结构的一个特点是通过直-交变换的隔离,使得新能源侧风机转速和光伏的频率变化与电网频率解耦,便于逆变器驱动MGP并网进行独立控制,而前级变流器负责风电和光伏的功率控制。因此,风电和光伏通过MGP并网结构如图1所示。

图1 采用MGP系统的新能源并网结构Fig.1 Renewable energy grid connection structure with MGP system
从控制结构来看,不同于新能源直接并网以电网频率为基准,采用dq轴解耦的矢量控制方式,新能源采用MGP并网,由于同步电机的旋转频率与电网相同,这就导致其无法以电网频率为基准实现控制,因此,通过控制直流母线电压进而控制逆变器的输出电压频率实现MGP功率的稳定传输。由同步电机的功角特性曲线可知,改变功角即可改变其输出有功,所以同步电机的功角特性则是实现MGP控制的理论基础。在同步电机频率无法改变的情况下,可以通过改变变频器输出电压频率,使同步电机功角变化,最后改变MGP的输出功率。针对图1所示新能源经MGP并网的结构,由于直流母线电容起到隔离新能源和MGP频率的作用,可以采用直流电压反馈控制方法实现MGP功率的稳定传输,控制框图如图2所示。

图2 MGP控制结构Fig.2 Control structure of MGP
图2所示为逆变器功率外环的控制结构,内环则采用传统的dq轴解耦的矢量控制方法,可以实现电动机最大转矩输出。无论是光伏还是风电机组,新能源侧的控制仍然采用最大功率点跟踪(maximum power point tracking,MPPT)控制算法,逆变器驱动SM则采用直流电压反馈控制方法与MPPT相配合的控制算法,由MPPT得到的最大有功功率Pmax进而得到直流母线电压参考值,再通过PI控制器得到逆变器输出电压频率给定值。
1.2 系统建模
1.2.1 新能源侧简化模型
为了适应直流电压反馈控制的结构特点,通过函数拟合的方法得到新能源输出有功功率和直流母线电压的关系,在最大功率点附近可以通过线性化得到近似表达式为:
P新能源=f(Udc)≈kUdc+b
(1)
式中:P新能源为新能源输出有功功率;Udc为直流母线电压;k、b为线性化拟合系数。
由图2可得逆变器输出电压频率的表达式为:
(2)
式中:KP、KI分别为PI控制器的PI参数;Uref为参考电压。
由上式可知,直流母线电压变化决定了SM定子电压频率的大小,而其变化快慢则由积分参数决定。因此,合适的积分参数选取对于新能源经MGP并网系统的频率变化有较大的影响。
1.2.2 MGP的数学模型
由上节新能源的简化模型可知,逆变器输出变量为电压频率,其决定了SM定子电压频率,进一步决定了SM功角大小和变化速率。根据隐极式同步电机功角特性和运动方程,建立MGP的数学模型如式(3)—(4)所示。
(3)
(4)
式中:XMd、XGd分别为d、q轴电抗;EM、EG分别为SM、SG的反电动势;m为同步电机定子绕组相数;EM、EG分别为SM、SG的反电动势幅值;UM、UG分别为SM、SG的定子电压幅值;δM0、δG0分别为SM、SG的功角初始值;ωi、ωr、ωg分别为逆变器输出电压角频率、MGP转子转速和电网电压角频率;Δωr为同步电机电角速度与机械角速度之差;HMGP、KMGP分别为MGP系统的惯性常数和阻尼系数;PM、PG分别为SM和SG的电磁转矩;TM、TG分别为SM和SG的电磁转矩。
与传统同步电机不同,MGP数学模型更多的考虑了功率传输与频率之间的关系,这主要因为两台电机同轴相连,其功率传输由两台同步电机轴间的电磁-机械耦合特性所决定。由于传统同步电机的电压、电流建模和暂态特性规律已有大量研究,在本文中直接引用而不多做赘述,此处建模重点分析新能源经MGP作为一个并网单元的特性。
2 MGP系统提升新能源暂态稳定性的分析
目前绝大部分新能源都是采用变流器直接并网方式,其耐压、耐流能力受到电力电子器件本身的限制,往往需要增加辅助手段以提升其暂态特性。而新能源经MGP并网的设备是同步发电机组,其过电流能力和耐压水平可接近常规机组。
一方面,由于MGP机械轴的隔离作用,电网侧的负荷突变、故障等扰动在SG中的暂态过程引起的过压过流对新能源侧电压、电流的影响很小,从而保护了新能源的稳定运行。另一方面,两台电机的电磁-机械耦合特性使得新能源侧的暂态机理的分析发生了变化。由式(3)—(4)可得:
(5)
式中δM、δG分别为SM、SG的功角。结合式(2)和式(5)可知,新能源经MGP并网的暂态特性主要由新能源逆变器的控制参数、同步电机参数和同步电机的功率特性三者共同决定。通过优选控制参数可以提高逆变器的调速特性,提高频率稳定性。鉴于新能源机组由于自身控制的原因不具备惯性和阻尼,MGP的惯性和阻尼正是解决这一问题的一种很好的方法,相比控制系统参数方便可调的特点,惯性常数和阻尼系数在MGP系统设计中需要结合新能源的运行特性加以考虑,在实际运行中很难去修改。至于MGP的功率特性,由于其源侧为新能源,有功调节受到新能源侧功率的波动性、随机性影响,不再具备常规火电机组的灵活性、可调性,而无功功率主要由同步电机独立的励磁系统决定,在暂态过程中可以达到传统机组相近的水平,因此可将新能源驱动MGP等效为电压大小可调的电流源。由于新能源经MGP并网的暂态特性受到多种因素的共同影响,相互间的作用关系较为复杂,很难用解析的方法去分析其暂态特性,所以本文主要通过仿真和实验对比,分析不同参数和场景下新能源经MGP并网的暂态特性。
3 仿真分析
在电力系统仿真软件PLECS中搭建了如图3所示的仿真模型。由于仿真过程中未考虑新能源侧波动的影响,仿真中新能源只是采用封装的光伏模块,控制系统采用直流电压反馈控制。电机参数如表1所示。

图3 仿真模型Fig.3 Simulation model

表1 同步电机参数Tab.1 Parameters of synchronous motor
为了测试惯性时间常数、阻尼系数和PI参数对新能源经MGP并网的暂态特性影响,在仿真中设置电网相电压有效值从220 V跌落至150 V,持续2 s后恢复。
3.1 惯性时间常数的影响
第一组仿真分别设置惯性时间常数H为2 s、3 s、4 s、5 s,PI参数均为(0.01, 15),阻尼系数KD为0.01。4次仿真的对比结果如图4所示。如图4(a)所示,H越大,电压跌落后频率的第一个振幅越低。但故障恢复后,稳定恢复时间和振荡的幅度随着H的增加也有所增加。综合考虑4个仿真结果的波形,为抑制振荡幅度和实现快速稳定恢复,当H=3 s时,仿真效果较好,说明在一定范围内适当增加惯性时间常数有利于提高新能源经MGP并网的暂态稳定性。
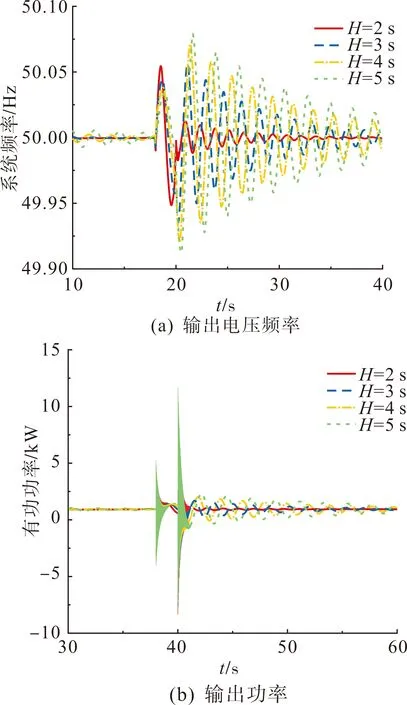
图4 不同惯性时间常数的仿真结果Fig.4 Simulation results of different inertia time constants
3.2 阻尼系数的影响
第二组仿真分别设置阻尼系数KD为0.000 1、0.001 0、0.005 0、0.010 0,PI参数均为(0.01, 1),惯性时间常数均为3 s。4次仿真的对比结果如图5所示。如图5所示,随着KD的增加,频率和有功的振荡幅值随之减小,有功恢复到稳态值的时间也相应缩短。在参数设置的范围内,增加MGP阻尼系数有利于提高系统的频率稳定性。而受到仿真模型的限制,阻尼系数不能无限制增加,在实际运行中阻尼系数也不是越大越好。因此,阻尼系数的选取应当在合理的范围内适当增加。

图5 不同阻尼系数的仿真结果Fig.5 Simulation results of different damping coefficient
3.3 PI控制参数的影响
由于PI参数中的比例系数对频率和有功的暂态振荡过程影响较小,所以只在第3组仿真中分别设置积分参数KI为1、5、10、15,KD均为0.01,惯性时间常数均为3 s。4次仿真的对比结果如图6所示。
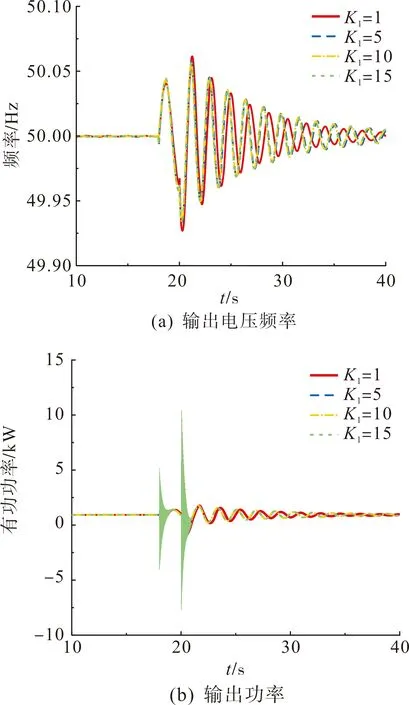
图6 不同PI控制参数的仿真结果Fig.6 Simulation results of different PI control parameters
由图6可知,KI>1时,频率和有功的波形相差不大。在故障初期,KI=1时,频率的振荡幅度稍大,但随着误差累计,较大的KI不利于暂态过程的频率恢复。由有功功率波形可知,KI增加对其振荡幅值和恢复速度影响不大,因为电压故障主要对系统的电压和无功功率影响较大,所以调整KI只会改善频率的波形。综上所述,积分参数值在适当范围内应选取的较小。
4 实验验证
为进一步验证新能源经MGP并网的暂态特性,在实验室搭建光伏驱动MGP并网平台,结构如图7所示。

图7 MGP电压穿越实验平台Fig.7 Voltage ride-through experiment platform of MGP
实验平台中光伏采用一台10 kW Chroma光伏模拟器,MGP采用两台STC-5.5型同步电机对拖系统,变频器采用某公司DF900型矢量控制变频器,通过MODBUS485协议实现与附加直流母线电压控制PLC模块的通信。另外,采用一台12 kW SUN 2000-12KTL型逆变器模拟光伏并网逆变器。实验平台的部分电气参数如表2所示。

表2 低电压穿越实验平台主要参数Tab.2 Main parameters of low voltage ride-through experiment platform
为分析光伏通过MGP系统并网的暂态特性,设置网侧相电压有效值从220 V分别升至230 V、250 V、286 V,持续一段时间后恢复,MGP输出的有功功率和无功功率从上至下如图8所示。
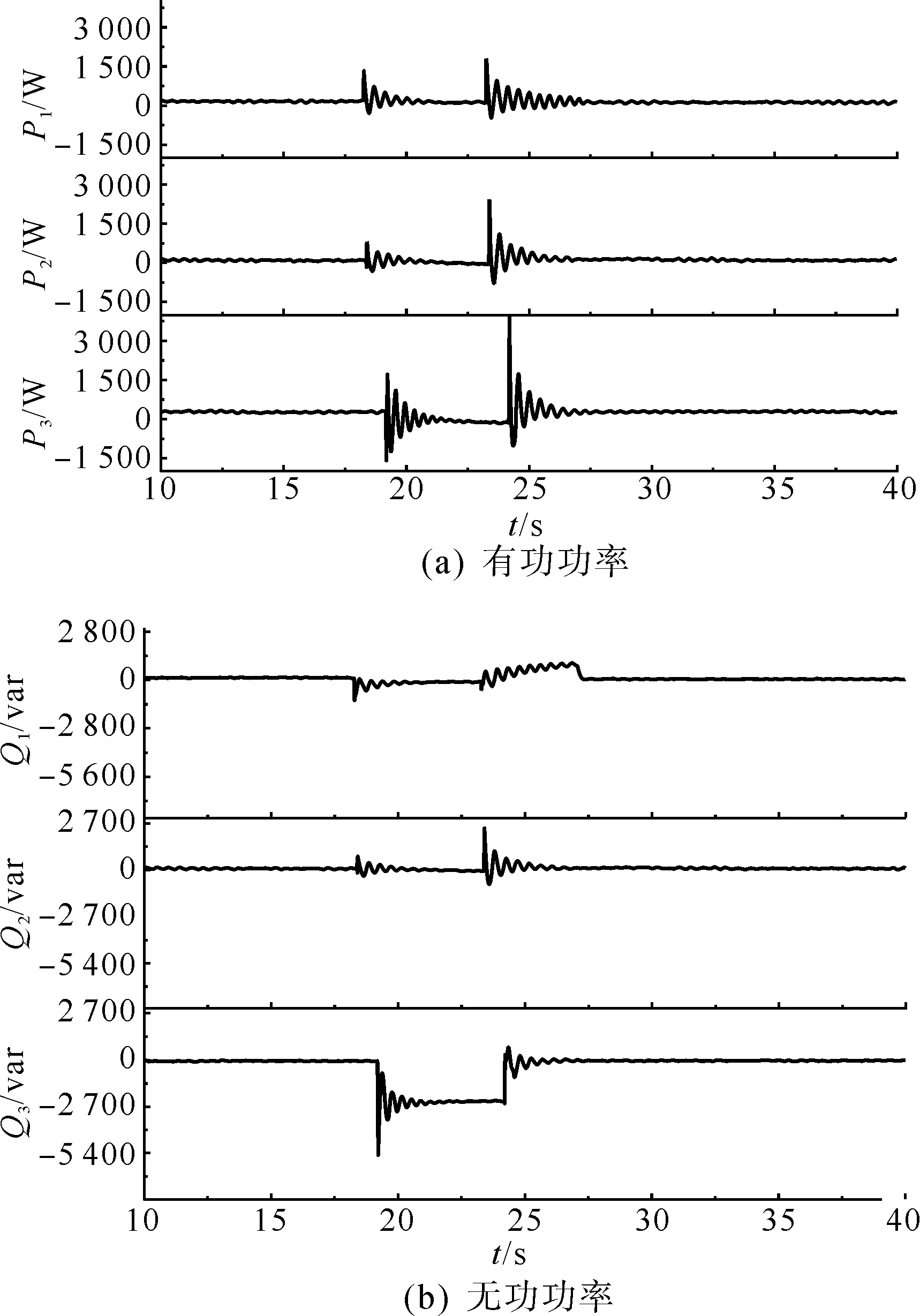
图8 不同电压故障的实验结果Fig.8 Experimental results of different voltage faults
由图8可知,有功功率的振荡幅度随电压变化幅度的增加而增加,但振荡幅值并未随之线性增加,且暂态恢复时间相近,说明MGP系统的惯性和阻尼在暂态过程中发挥了重要的作用。同时控制系统在暂态过程中保持着系统出力的相对稳定,有利于故障的快速恢复。
为了对比光伏直接并网和经过MGP并网系统在负荷变化情况下的惯性响应和阻尼情况,分别在图7的实验平台中做了两组相同的变负载实验。两组实验的负载三相有功功率均增加300W,且光伏模拟器输出的有功功率相同,实验结果如图9所示。
由图9中并网点频率波形对比图可知,当负载增加时,光伏经MGP并网的频率最大偏移量仅为光伏直接并网时的一半,而且前者频率的下降速度更小,可以向电网输出一定的有功功率,说明PV经MGP并网可以有效提高光伏并网的惯性响应和阻尼水平,从而增加新能源电网的频率稳定性。
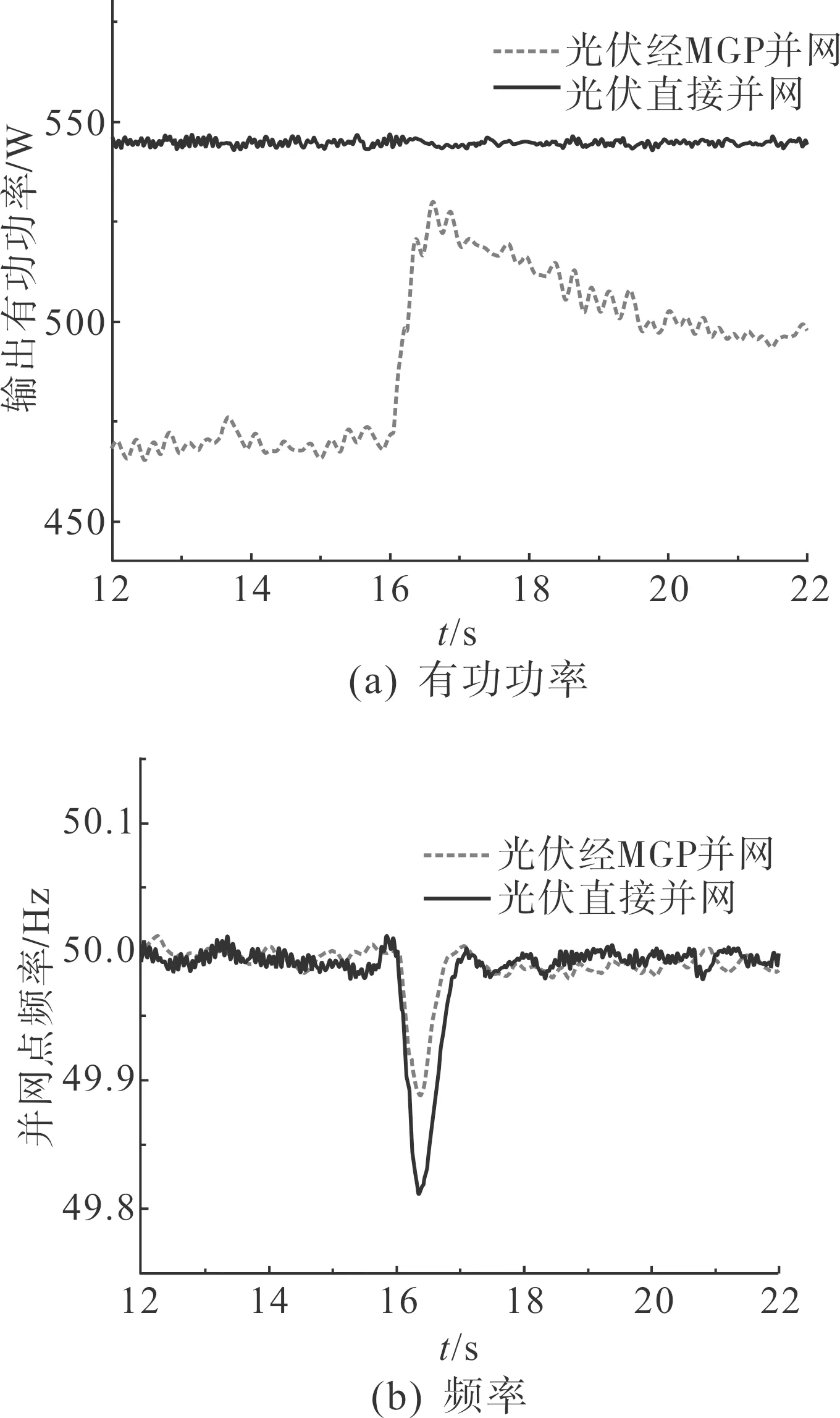
图9 负荷变化下的实验结果Fig.9 Experimental results of load change
5 结语
本文针对新能源并网引起的暂态稳定性问题,重点研究了新能源经MGP并网的暂态稳定性,通过对新能源采用MGP并网系统建模和分析可知,控制系统的积分参数、MGP的惯性和阻尼是决定系统暂态稳定性的关键参数。在仿真中设置相同故障,对比不同参数下系统的功率和频率响应,结果表明在合理的范围对参数的优选可以减小暂态过程中的频率和有功功率的振荡幅值和稳态恢复时间。最后在实验平台分别对比了不同电压故障下新能源经MGP并网的功率响应,以及相同负荷变化下光伏是否经MGP并网的有功频率响应,结果表明MGP系统的惯性和阻尼均有利于提升MGP系统的暂态稳定性。
猜你喜欢
防爆电机(2022年4期)2022-08-17
北京航空航天大学学报(2022年6期)2022-07-02
防爆电机(2022年3期)2022-06-17
电气电子教学学报(2022年2期)2022-05-23
能源工程(2021年2期)2021-07-21
防爆电机(2021年3期)2021-07-21
防爆电机(2021年2期)2021-06-09
电子制作(2018年14期)2018-08-21
科技视界(2015年18期)2015-12-25
中学生数理化·八年级物理人教版(2014年1期)2015-01-09