基于空中智能表面的毫米波通信性能分析
2021-04-23 02:09程吟轩周思源谭国平詹佳俐
计算机与现代化 2021年4期
程吟轩,周思源,谭国平,张 芝,詹佳俐
(河海大学计算机与信息学院无线通信与智能系统研究所,江苏 南京 211100)
0 引 言
随着第五代移动通信技术的出现,通信频段不断提高,超高频信号在城市区域中传输很容易受到干扰。由于高楼和树木等障碍物的存在,非视距(NLoS)传输比视距(LoS)传输发生的概率大。作为一种很有前景的节能且经济的材料,大型智能表面的出现可以解决以上问题。大型智能表面系统依赖于大量的反射面阵列,其中每个反射面可以调整入射信号的相位位移和振幅反射系数。大型智能表面网络的概念依赖于电磁可控表面,通过有益地利用信道状态信息(CSI),可以智能地集成到现有的基础设施中。
随着大型智能表面的出现,文献[1]中对基于大型智能表面的大型天线阵列系统上行数据率进行了渐近分析。大型智能表面辅助的系统可以使用更少的有源天线来提供类似于大规模MIMO的增益,因此可以显著降低基站的能量消耗。由于可重构的优点,大型智能表面甚至在未来的第6代移动通信技术中也有很好的应用前景[2]。
随着无人机技术的发展,空中载体逐渐成为下一代无线通信网络系统中不可缺少的一部分[3]。无人机可以被设置作为接入点,有效地从地面网络分流流量,提供尽可能大的LoS传输,提高系统覆盖率和网络容量[4]。此外,无人机的灵活性使其在城市地区的部署更加多样化,能够适应不同应用的需求[5-9]。一方面,大型智能表面在信号增益相同的情况下可以节省大量的电能,而且不受噪声放大效应的影响。另一方面,无人机的机动性使得大型智能表面的部署更加容易。无人机与大型智能表面的结合正在成为城市无线通信网络不可缺少的一部分[6,10-12]。
然而,现有的关于空中智能表面的研究只关注优化无人机轨迹的算法[13-15],通过算法的改进来提高通信性能[5-6,16-17],而网络覆盖率在此前空中智能表面的相关工作中没有提及。本文针对三维网络模型的系统性能进行分析,着重研究对于网络覆盖率的影响,在此基础上利用泊松点过程(PPP)来描述被空中智能表面覆盖的用户,推导出系统覆盖率[18]的公式。
结合无人机和大型智能表面的优点,本文旨在介绍一种灵活的空中智能表面部署方案:空中智能表面在市区的基站附近巡航,为空中智能表面覆盖的附近用户提供服务。在城市无线通信系统中,PPP是用来描述地面用户分布的。通过计算覆盖区域的面积,得到用户与空中智能表面之间距离的概率密度函数(PDF)。本文推导了空中智能表面与任意一个用户的信噪比(SNR)的公式[19-20],最后,给出系统覆盖概率的解析表达式。本文的详细工作如下:
1)提出一种基于空中智能表面的毫米波通信3D模型:利用空中智能表面对中心基站的信号进行处理,采用相应的相位幅值和角度调整算法,消除地面用户之间的干扰。经过处理后,将NLoS传输转换为LoS传输,使信号被巡航的空中智能表面所服务的地面用户接收。
2)研究基于空中智能表面的毫米波通信性能:首先用PPP来描述随机分布在该区域内的用户,然后推导出被覆盖用户与空中智能表面之间的距离的PDF,最后得到系统覆盖概率的表达式并研究了网络参数对覆盖性能的影响。
3)结合相关理论和仿真结果,比较静态大型智能表面(通常附着于建筑物)和动态大型智能表面(空中智能表面)的性能,得出在城市毫米波通信中后者明显优于前者的结论。
1 系统模型
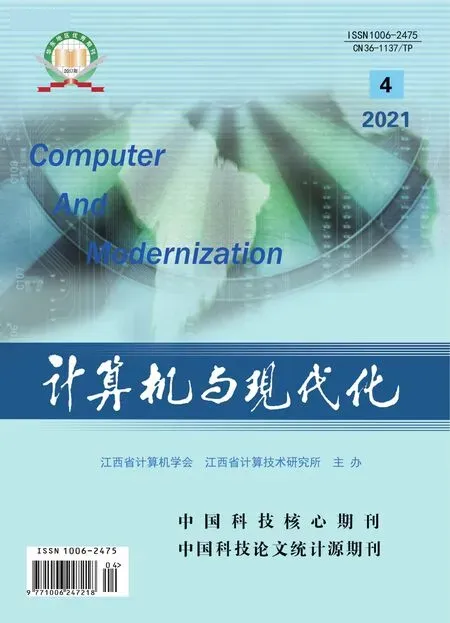
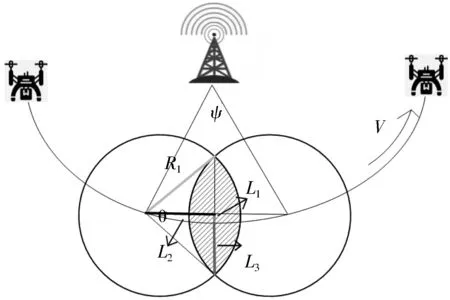
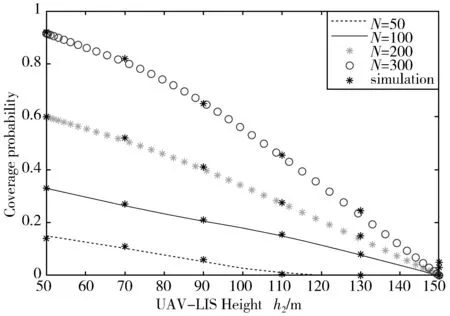
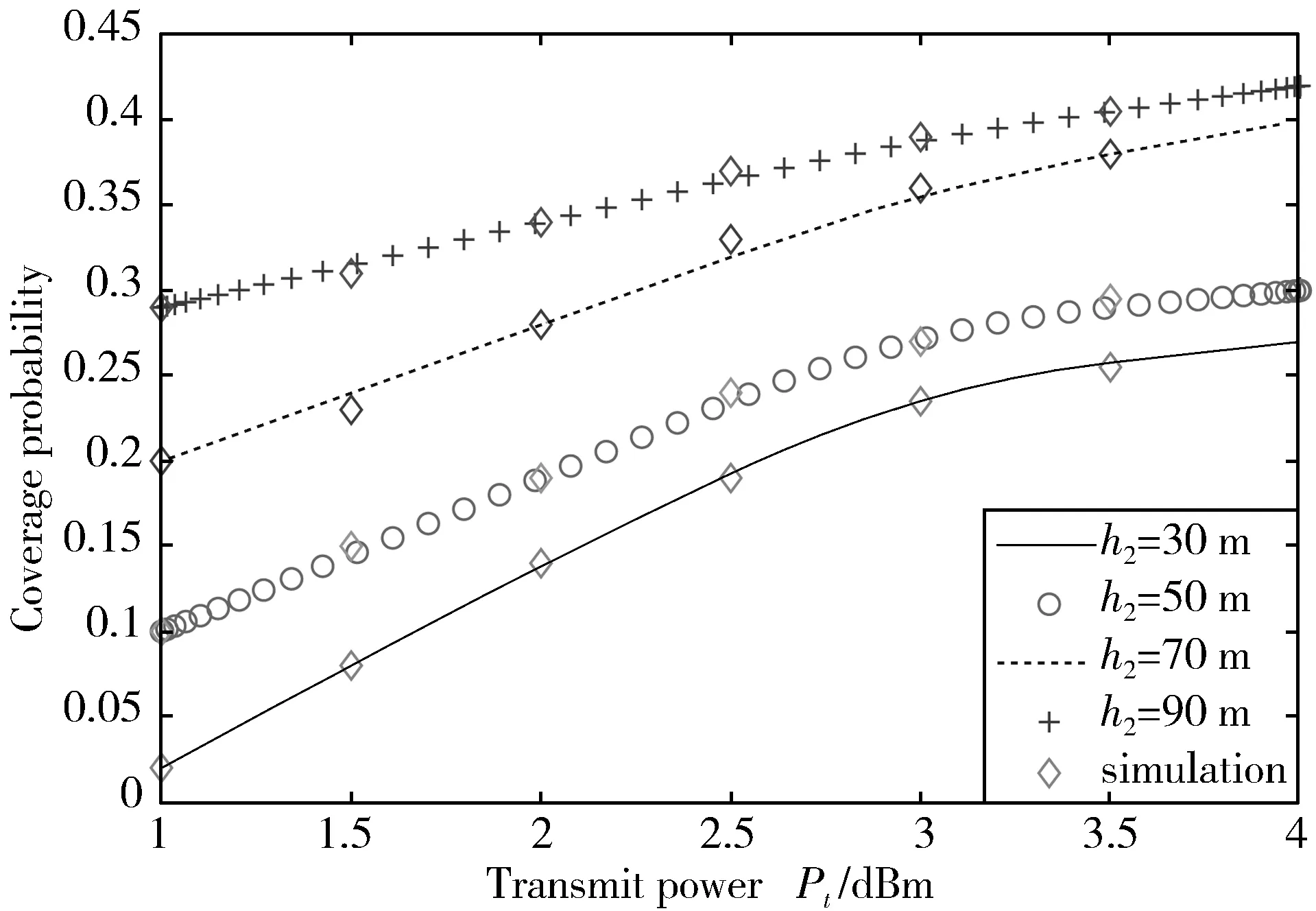
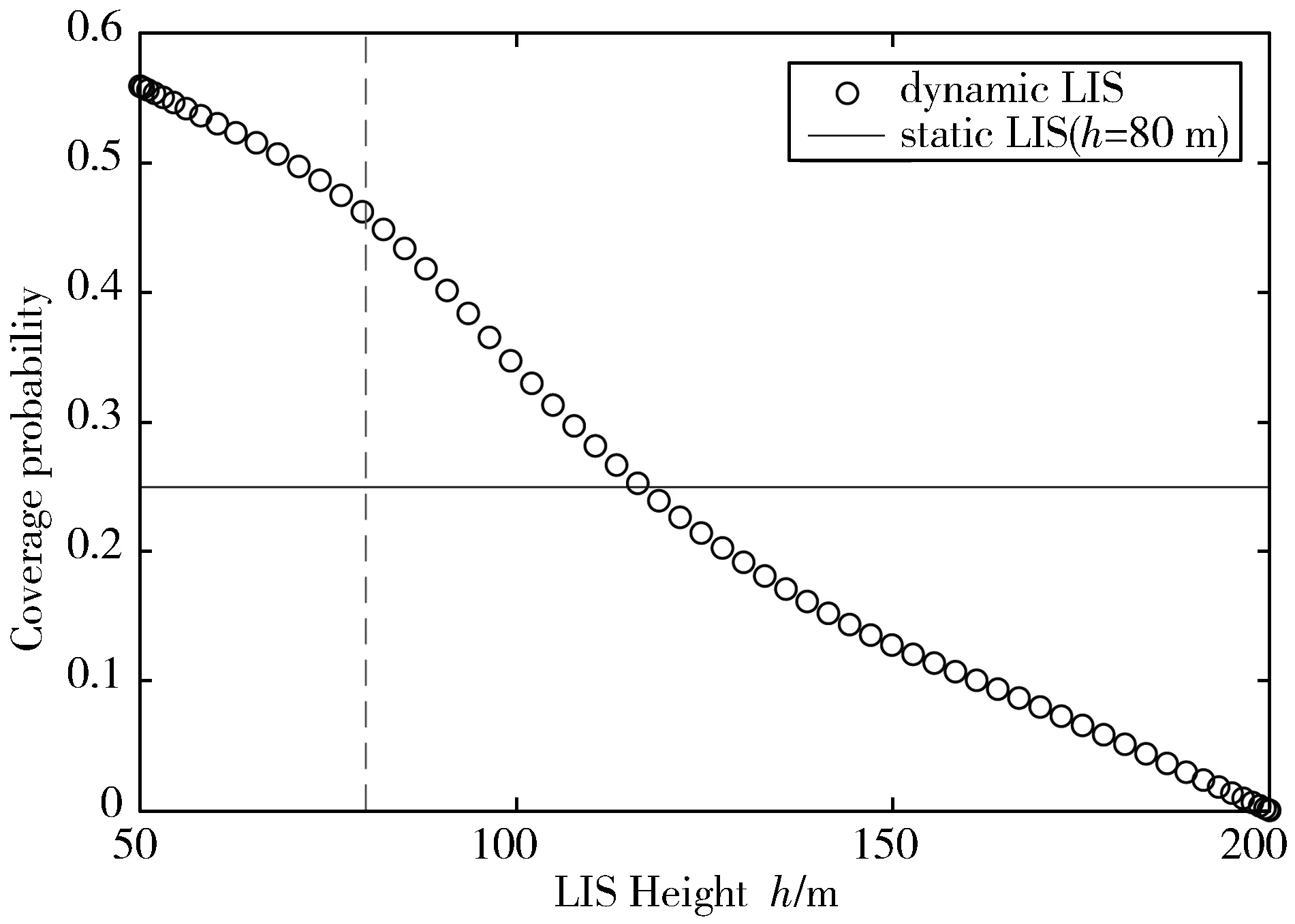
考虑一个中继通信的下行网络,地面用户的空间位置按照均匀独立的PPP分布在R2平面上,密度为λ,基站高为h1,位于区域中心。空中智能表面围绕中心基站以半径RL(RL 图1 系统模型图 考虑一个大尺度和小尺度衰落的复合信道模型。距离D1和D2是独立分布的。对于任意用户和基站之间的大尺度衰落,可以表示为: L=(D1D2)-∂ (1) 其中∂表示路径损耗指数。 为了表示基站和空中智能表面之间的LoS传输,本文采用Nakagami衰落信道来模拟毫米波通信的情况[12]。n1和n2分别用来描述2跳传输中的衰落过程。考虑N个用户每人配置K个接收天线,M个基站和用户之间存在MN个大型智能表面。n1是一个MN×M的矩阵,其中的元素代表Nakagami衰落信道增益,m1为衰落因子。n2是一个K×MN的矩阵,其中的元素代表Nakagami衰落信道增益,m2为衰落因子。m1和m2是独立同分布的。其中元素的PDF可以表示如下: (2) 其中Γ(·)表示Gamma函数。当m为整数时Γ(m)=(m-1)!。 为了同时控制大量的空中智能表面,全局CSI在大型智能表面和用户端都是已知的。在下行链路中,基站传输信息矢量S给地面用户,从基站发出经过大型智能表面抵达用户的信号可以表示为: (3) (4) (5) 其中Pt代表传输功率,hm表示信道增益,N0表示噪声功率。 考虑空中智能表面和地面用户的连接,空中智能表面的飞行速率为V。平均信道接入时延(t0)为建立A2G通信连接的平均时间,即t0表示平均接入时延[21-22]。举个例子,空中智能表面从t1时刻开始覆盖一个地面用户,一段时间后从t2时刻开始不再覆盖该用户,那么如果满足下式就可以说该用户被空中智能表面所覆盖: t2-t1≥t0 (6) 也就是说,空中智能表面可以给该用户提供完整的数据包。本文中空中智能表面的巡航半径为RL,它的瞬时覆盖区域是一个以它为圆心、R1为半径的圆。在飞行了t0时间后,显然空中智能表面的覆盖区域为图2中所示的阴影区域。 图2 空中智能表面覆盖区域示意图 空中智能表面飞行轨迹的中心角为ψ,满足: Vt0=RLψ (7) L2表示t1时刻空中智能表面到阴影部分区域中心的距离,L1加上L3为2圆交点所连线段长度的一半。 L1=RL(1-cos(ψ/2)),L2=RLsin(ψ/2) (8) 考虑到实际情况中空中智能表面的覆盖区域是大于0的,即: R1>RLsin(ψ/2) (9) 阴影部分可以分成2块完全相等的圆弧,圆弧所对应的圆心角可以通过余弦定理求得: (10) (11) 在空中智能表面的覆盖区域内,通过计算阴影部分的面积可以求出地面用户到空中智能表面的水平距离r的PDF: (12) 其中Fd(r)是距离r的累积分布函数,根据距离r取值的不同可以分为以下3种情况。 1)r0 S1=πr2 (13) (14) 2)r1 (15) (16) (17) (18) 将θ1的表达式对r求导,并对θ2也做类似的处理。为了化简表达式,令: (19) (20) 结合式(19)和式(20),可以得到: (21) 图3 空中智能表面3种覆盖区域示意图 利用积分求解面积S2,积分上下限分别为θ2和θ1: (22) g(θ)=L1cosθ-(L1+L3)sinθ+ (23) (24) 由式(22)~式(24)可以得到: (25) 3)r2 (26) (27) (28) r取值的边界值分别如下: r0=0 (29) (30) (31) (32) 综上所述,覆盖区域内任意一个用户到空中智能表面的距离r的PDF如下: (33) 一个任意用户的SNR表示见式(5),系统SNR的期望值可以通过下式求得[23-24]: (34) (35) 其中: (36) (37) 在本章中,通过对第2章中系统模型的精确再现,利用蒙特卡洛仿真实验对以上理论推导结果的正确性进行验证,并对系统参数进行调整,观察其对系统整体性能的影响;最后提出优化方案。 除非特别指定,本文使用以下实验参数作为默认值:RL=100 m、h1=30 m、σ2=-143.2 dBm、∂=3、ε=1.5、V=10 m/s以及t0=1 s。 图4描述了系统覆盖率与空中智能表面飞行高度和用户数量之间的曲线关系。显然可以看出随着飞行高度的增加,系统覆盖率急剧下降。图中的黑点是仿真结果,与曲线的走向基本保持一致,这验证了推导的系统覆盖率公式的正确性,反映了在覆盖密集用户的情况下(N=300)系统覆盖率更高,而这恰恰符合城市区域高人口密度的特点,体现了本文模型和城市毫米波通信场景的高契合度。然而当空中智能表面的飞行高度超过100 m时,系统覆盖率呈现急剧下降的趋势,说明在采取策略时应该尽量让空中智能表面的飞行高度小于100 m。 图4 系统覆盖率随空中智能表面高度h2和用户数量N变化情况 图5 系统覆盖率随空中智能表面高度h2和传输功率Pt变化情况 图5展示了空中智能表面在不同的飞行高度下,变化传输功率对于系统覆盖率的影响。显然传输功率越高,系统覆盖率越高,相应地,系统开销也会增大。 在图6中,展示了空中智能表面围绕中心基站的飞行半径变化对于系统覆盖率的影响,系统覆盖率并不是一味随着飞行半径的增大而增大,而是在大约100 m左右取到最大值。引入TCP(Thomas Cluster Process)分布,设定TCP的方差为150,将空中智能表面高度等于50 m时的情况与PPP进行对比,发现飞行半径较小时,此种部署方式更适用于TCP分布的用户,而当飞行半径增大,更适用于PPP分布的用户,可见在实际部署中需要根据所在区域用户的分布情况来调整相应的飞行半径。 图6 系统覆盖率随空中智能表面高度h2和飞行半径RL变化情况 图7描述了在其他参数固定不变的情况下,大型智能表面采取动静2种状态对于系统覆盖率的影响。城市区域中的静态大型智能表面多附着于大楼上,成本较低,而配置动态大型智能表面则需要类似无人机的空中载体,成本相对较高。从图中可以看出高度小于100 m时,动态大型智能表面的覆盖率是明显优于静态的,这也为城市区域毫米波通信的部署策略提供了更多方案。 图7 大型智能表面动静2种运行状态下系统覆盖率的比较 本文研究分析了在城市毫米波通信系统中部署空中智能表面的通信性能,提出了一个3D几何理论框架来推导基于空中智能表面的系统覆盖率。实验结果反映了空中智能表面的飞行高度、状态、地面用户数量等参数对于系统覆盖率的影响,引入空中智能表面能够有效提高系统覆盖率。这有利于未来在城市毫米波通信系统中提出更优的方案。后续的工作将会围绕上行链路和用户的移动性展开。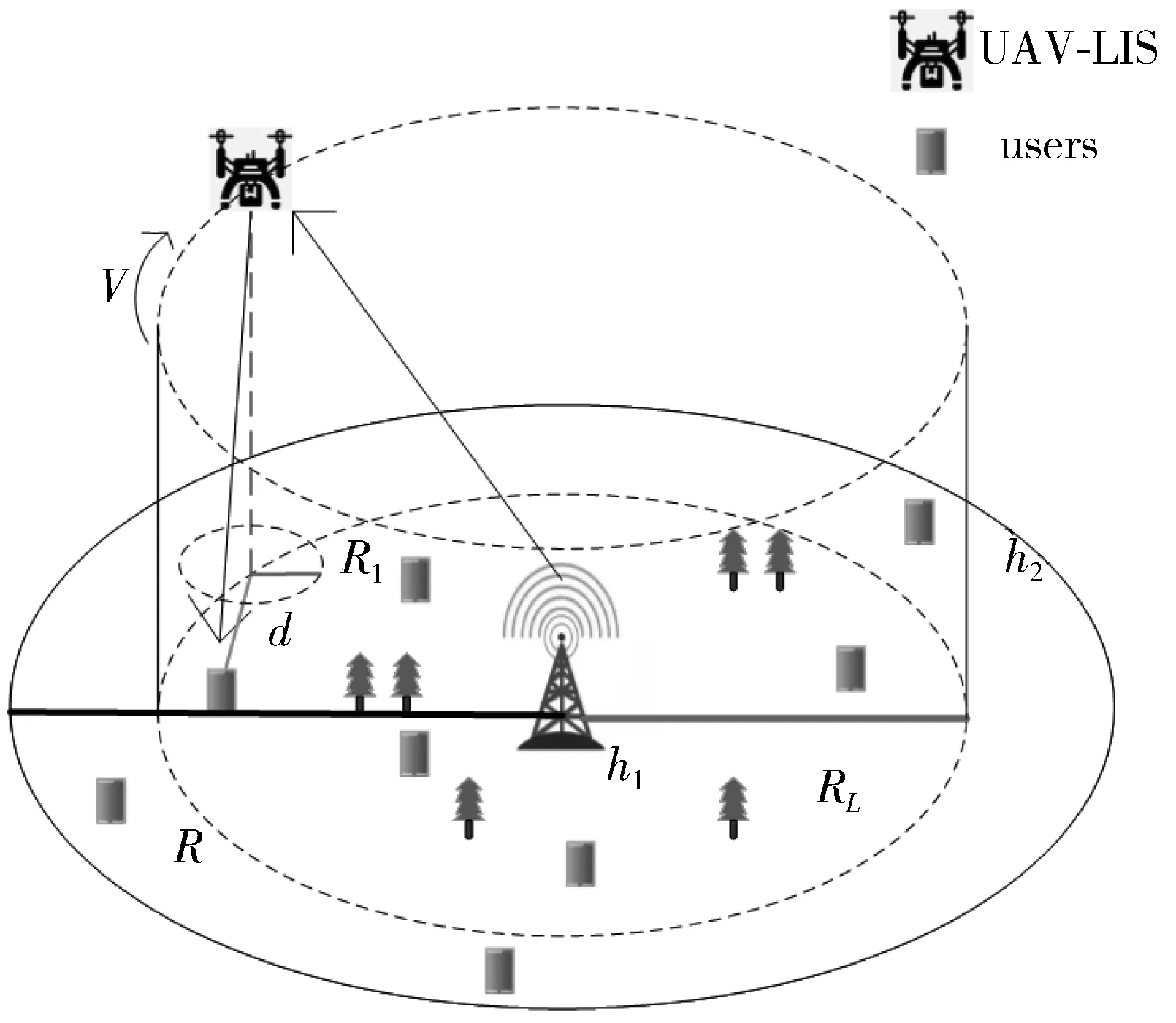


2 系统覆盖率
2.1 距离分布


2.2 覆盖率分析


3 实验分析

4 结束语
猜你喜欢
今日农业(2022年15期)2022-09-20今日农业(2021年21期)2021-11-26制造技术与机床(2019年6期)2019-06-25电子制作(2017年8期)2017-06-05探索科学(2017年4期)2017-05-04华东师范大学学报(自然科学版)(2017年1期)2017-02-27中国交通信息化(2016年8期)2016-06-06西南交通大学学报(2016年6期)2016-05-04林业与生态(2016年2期)2016-02-27移动通信(2015年17期)2015-08-24