基于偏心桨机构的水陆两栖机器人陆上步态实验研究
2021-04-23 04:53:16杨洪涛
三门峡职业技术学院学报 2021年1期
◎杨洪涛
(商丘职业技术学院经贸系,河南商丘476000)
传统的陆上或水下机器人通常只能在单一环境下工作,很难应用于重大灾害侵袭后的恶劣的两栖环境中。与此不同,基于偏心桨机构的两栖机器人能够根据桨轴的主动控制实现丰富的运动形式,适应水下、沙地、泥泞和岩石陆地等各种复杂的环境,可以应用于灾害救援、行星探测、地质调查等方面[1-9]。
仿生水陆两栖机器人灵感来自自然水陆两栖生物的形态以及运动特征,包括蛇类机器人、蝾螈机器人、鱼类水陆两栖机器人、龙虾机器人等。蛇形机器人是一种类似蛇的仿生机器人,具有不同的构型和尺寸。虽然蛇形机器人在大小和设计上有很大差异,但他们可进入并在狭窄的空间里工作。鱼类机器人具有活鱼的形状和运动。目前,研究人员已经开发出约40种不同类型的鱼类机器人,其中大多数鱼类机器人都可模仿使用身体尾鳍(BCF)推进的活鱼。蝾螈机器人能够通过使用蝾螈髓质神经网络的数字模型来移动。
可通过远程站传输简单命令实现速度调控。龙虾机器人由一种特制的防水电池提供动力,它头部的两根长须是一种灵敏度极高的防水天线,脚上都装配有防水毛传感器,它的大脑则是一台超微型计算机,能够像真龙虾一样适应不规则的海底,在不同的深度敏捷地行动,并且可以灵巧地应对汹涌的波涛和变化的海流,躲避各式各样的海底礁石。这些机器人模仿其对应生物的生物学特性和功能。然而,仿生学两栖机器人受工作环境限制较大。比如,蛇机器人、鱼类机器人、蝾螈机器人[10]都能够在水中和陆上移动,但它们可能会卡在湿地或崎岖的地形上。龙虾机器人可以在陆地或海底行走,但它不能在水中游泳。
虽然在水陆两栖机器人设计方面已经取得了许多成就,但两栖机器人依然难以用于实际任务,例如在发生海啸或洪水之后的搜索和救援任务。在这种情况下,期望水陆两栖机器人能够在不平坦的地面上行进、在水中游泳、通过沙滩和泥泞的水池。由于移动性能,运动效率和负载能力的限制,大多数现有的水陆两用机器人难以应用在这些实际的高风险任务中。基于偏心桨机构的两栖机器人能够根据桨轴的主动控制实现丰富的运动形式,适应水下、沙地、泥泞和岩石陆地等各种复杂的环境,可以应用于灾害救援、行星探测、地质调查等方面。笔者以偏心桨机构为研究对象,搭建了基于LabVIEW系统的实验台,对该机构的陆上步态运动性能进行了测试。
1偏心桨机构运动原理
偏心桨机构最先由Sun等人提出[1],包含一个轮式壳体和一组桨叶,如图1所示。轮壳由一个马达驱动实现旋转运动,固定在轮缘的铰链可以被动旋转,桨叶通过铰链实现伸缩。桨叶轴由一对马达通过行星齿轮机构驱动,在轮壳内实现平面运动。当轮向前滚动时,通过调整桨叶轴的位置控制桨叶主动地伸出或缩回,实现前向运动。

图1 陆上步态相序
2偏心桨机构陆上步态测试实验台搭建
本实验的步态设计与控制采取LabVIEW控制程序,如图2所示。控制面板如图3所示,在进行实验时,这也是整个实验的控制面板,控制电机的运作时间与运动方向。为了验证水陆两栖机器人陆上步态效果,搭建了如图4所示的实验台。该实验平台长为1900mm、宽为600mm、高为1200mm。通过型材将两个偏心桨模块固定在实验台的移动平台上,该移动平台在竖直方向和水平方向采用直线轴承导向。通过主动调节桨轴位置,机器人可保证平衡并带动平台向前移动。

图2 运动步态控制程序结构

图3 实验台控制面板
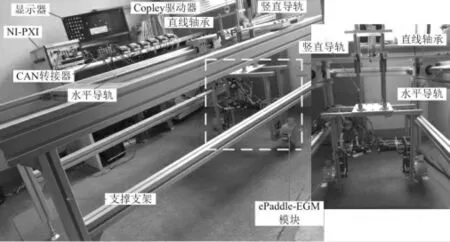
图4 陆上步态测试实验台
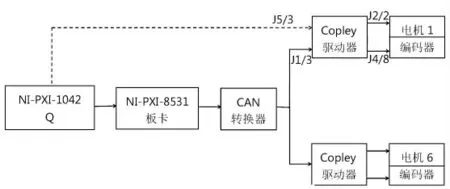
图5 实验台控制系统框架
实验台控制系统框架如图5所示。包含NI-PXI-1042Q机箱、CANopen PXI接口、Copley驱动器等核心设备。NI-PXI-1042Q机箱为8插槽,安静的通用交流PXI机箱。PXI-1042Q满足当今PXI应用的苛刻的冷却和电源要求。PXI-1042Q兼容3U PXI和CompactPCI模块。它还具有扩展的温度范围和可移动的高性能交流电源。NI-PXI-8531是一款单端口高速CANopen PXI接口,用于通过NI LabVIEW开发Windows或LabVIEW实时系统上运行的CANopen应用程序。CANopen是基于控制器区域网(CAN)物理层的高层通信协议。该产品为运动机器控制网络(例如处理系统)设计,也广泛用于其他应用,包括医疗设备、越野车辆、海事电子、公共交通和建筑自动化。Copley驱动器采用Accelnet Micro Panel(ACJ-055-09)的20-180V无刷电机直流数字驱动器。Accelnet Micro Panel是紧凑型直流电动伺服驱动器,用于交流无刷和直流电刷电机位置,速度和转矩的控制。它可以在分布式控制网络,独立分度驱动器或外部运动控制器上运行。标准反馈是数字四通道A/B编码器,两种选项可用于支持无刷分解器(-R)或模拟sin/cos编码器(-S)。索引模式使PLC能够简化操作,使用输出选择和启动索引和输入以读取驱动器状态。此外,PLC可以发送可更改运动配置文件的ASCII数据,以便随着机器人需求的变化,一个索引可以执行各种运动,并支持CANopen分布式控制架构。作为CANopen协议下的CAN节点,它支持轮廓位置,轮廓速度,轮廓扭矩,插补位置和归位。单个CAN总线最多可以运行127个驱动器,并且可以通过CAN连接一组驱动器,以便它们一起执行运动配置文件。在转矩(电流),速度和位置模式下,可以使用外部运动控制器进行操作。输入指令信号可以为±10V(转矩,速度,位置),PWM/Polarity(转矩,速度)或步进格式(CU/CD或步进/方向)。
3实验验证及分析
3.1障碍物设定
选取5mm×5mm×100mm的木块作为障碍物的基本单元,设置了三组不同的障碍物来研究两栖机器人机构的越障能力。
障碍物一:这种障碍物是最简单的障碍物设置,仅由一个基本单元组成。使用了一个5mm×5mm×100mm的木块。设置这种障碍物,是为了研究两栖机器人装置在翻越普通大小、形状单一的障碍物时,其运动状态以及越障情况。将障碍物直接放置在地板的防滑垫之上,然后将其固定,防止单个障碍物在与两栖机器人装置的桨叶接触时导致障碍物滑动。
障碍物二:障碍物二的设置是在由基本单元组成的障碍物一的基础上升级完成的。利用六个5mm×5mm×100mm的木块拼接而成。由于设备设施的限制,先用透明胶将三个木块组合成一个小的障碍物,然后用三个木块再次拼接成一个相同样式的障碍物,之后将两个组合完成的障碍物堆放在一起,使之紧密结合。
障碍物三:在障碍物二的基础上,再加六个5mm×5mm×100mm的木块,组合成本次实验中的主要障碍物,即障碍物三。由十二个5mm×5mm×100mm木块组合而成的障碍物三详见下图6所示。关于障碍物三的制作,在障碍物二的基础上,我们利用六个5mm×5mm×100mm木块组合成二个5mm×15mm×100mm的条形块,然后把他们与障碍物二紧密堆放在一起。
3.2实验设备的设定

图6 实验用障碍物
首先启动NI-PXI-1042Q主机。该主机自带Windows系统,因此,不需要其他主机。然后打开显示器。打开调试好的PVT步态控制程序,在程序内设置完成偏心桨机构的运动方向与运动时间。之后,返回至控制主界面(如图7所示)。
本实验测试桨叶轴在不同位置的情况下,偏心桨机构的运动性能和越障能力。下图9分别是桨叶轴距离轴心位置0.5倍半径处右下45°、距离轴心位置0.5倍半径处右边90°、距离轴心位置0.5倍处左边-90°的三个位置的示意图。

图7 实验控制台
3.3实验内容的设定

图8 实验状态
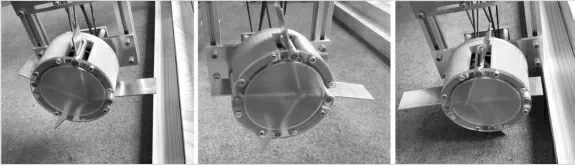
图9 桨叶轴处于不同位置时的实物
为简化表格,用“S”代表桨叶轴的位置;“d”表示桨叶轴与障碍物的距离,单位为mm;障碍物类型用“T”表示,其中“T1”表示障碍物一,“T2”表示障碍物二,“T3”表示障碍物三;总实验次数用“N”表示;越障成功次数用“P”表示;越障失败次数用“F”表示。

图10 关于“S”记法中α的说明
其中,位置“S”的表述说明如下:如下图10所示,以偏心桨机构的中心为中心,竖直线的下半部为角度的起始位置,逆时针旋转过的度数为正(+α)。在做实验时,桨叶轴的位置是变化的,为了简便,将桨叶轴的位置记为“L-α”。例如“0.5R-45°”(R代表半径)表示:桨叶轴中心距离端盖中心的距离为0.5R,桨叶轴中心与端盖中心的连线与竖直线的下半部成45°夹角;“0-0”表示:桨叶轴中心与端盖中心重合,此时桨叶轴处于正中心。
实验内容分类如表1所示。每组实验重复10次,记录成功与失败次数。图11为其中一组实验成功的示例。
3.4实验结果

表1 实验分类

图11 实验成功示例

表2 实验结果总览
在270余组实验中,统计并且分类记录了所有实验结果,列于表2。越障成功次数用“P”表示;越障失败次数用“F”表示。
3.5实验分析与讨论
通过实验记录的数据,计算出在270组实验数据中,平均成功率为66.67%。同时发现不考虑桨叶轴位置对越障能力以及偏心桨机构运动性能的影响时,在T1障碍物情况下,平均成功率为83.33%;在T2障碍物情况下,平均成功率为70.00%;然而在T3障碍物情况下,平均成功率仅为46.67%。当考虑桨叶轴位置对越障能力以及偏心桨机构运动性能的影响时,发现在“S”相同的情况下,障碍物由“T1”到“T3”的过程中,越障实验的成功率呈现递减的趋势。因此可以得出结论:障碍物越简单,偏心桨机构越容易成功翻越。
结语
传统的陆上或水下机器人通常只能在单一环境下工作,很难应用于重大灾害侵袭后的恶劣的两栖环境中。与此不同,基于偏心桨机构的两栖机器人能够根据桨轴的主动控制实现丰富的运动形式,适应水下、沙地、泥泞和岩石陆地等各种复杂的环境,可以应用于灾害救援、行星探测、地质调查等方面。通过本实验研究,搭建了基于偏心桨机构的陆上步态测试实验台,并完成了多组不同情况下的陆上步态实验,分析了基于偏心桨机构的两栖机器人陆上步态实验的结果。实验结果表明,偏心桨叶轮较传统的光轮具有良好的越障能力,且桨叶轴位置对越障能力以及偏心桨机构运动性能具有显著影响。未来,将研究规划桨叶轴的轨迹规划方法,以提高偏心桨叶轮式机器人在复杂环境下的通过性。
猜你喜欢
火控雷达技术(2023年2期)2023-07-15 14:00:06
装备制造技术(2021年1期)2021-05-21 07:55:00
小学生学习指导(低年级)(2019年9期)2019-09-25 07:43:28
固体火箭技术(2018年6期)2019-01-18 10:56:26
湖北文理学院学报(2017年2期)2017-04-16 05:09:09
数学小灵通(1-2年级)(2017年3期)2017-04-16 04:40:39
工业设计(2016年11期)2016-04-16 02:48:32
振动工程学报(2015年2期)2015-03-01 01:16:07
固体火箭技术(2014年3期)2014-03-15 06:47:06
河南科技(2014年4期)2014-02-27 14:07:12