复杂动力学网络上的基于线性控制下的相继投影同步
2021-04-23 05:30:42祝晓静李科赞
桂林电子科技大学学报 2021年6期
祝晓静, 李科赞, 丁 勇
(1.桂林电子科技大学 数学与计算科学学院,广西 桂林 541004;2.桂林电子科技大学 计算机与信息安全学院,广西 桂林 541004;3.鹏城实验室网络空间安全研究中心,深圳 518055)
网络同步是一种非常普遍且十分重要的非线性现象,已受到数学、物理、化学、生物、医学、工程技术、信息技术等领域学者的广泛关注和深入研究[1-5]。网络同步在英特网、核磁共振仪、激光设备、超导材料和通信系统等领域有着广泛应用[6],涉及到国计民生和社会经济的诸多方面,具有十分广阔的发展前景。
投影同步是一种重要的同步方式,最初是定义在低维的驱动响应系统之上,并被深入研究。1999年,Mainieri和Rehacek在部分线性系统的耦合系统中,如Lorenz耦合系统和disk dynamo耦合系统,首次发现了投影同步现象[7]。投影同步指的是驱动系统和响应系统的状态变量在相差一个比例因子的前提下能趋于同一状态。特别地,当比例因子为1时,投影同步就是完全同步。利用Lyapunov函数方法,Li等[8]进一步给出了投影同步发生的充分条件,不过比例因子无法事先确定。为了实现给定比例因子下的投射同步,Xu提出了一种线性反馈控制策略[9],其中控制器是追加在驱动系统之上。
本世纪初期,随着网络科学的发展,复杂网络上的投影同步受到广泛关注和深入研究。2007年,为了研究复杂网络上具有一致比例因子的投影同步问题,Hu等[10]首次将低维的驱动响应系统推广至高维的驱动响应网络,其中驱动系统由具有部分线性动力学特征的单个节点构成,响应系统由多个节点耦合形成的动力学网络(不妨称为响应网络),获得了投影同步判据和牵制控制方法,不过并未给出受控节点的选择方法。Zheng等[11]将驱动系统和响应系统都推广至动力学网络,研究了驱动网络和响应网络对应节点之间的投射同步,不过需要控制响应网络的所有节点。近年来,驱动响应网络上的函数投射同步也是较为关注的问题[12-13]。如果驱动响应网络的节点局部动力学不是由部分线性系统来刻画,并且节点之间的耦合方式是非线性的,那么投影同步是无法精确实现的。对于这种情形,在一定的条件下只能实现弱投影同步[14],也就是说,虽然无法使得投影同步误差趋于零,但是可以把它控制在很小的范围之内。近几年,分数阶复杂动力学网络和神经网络上的投影同步问题已成为研究热点问题[15-16]。
通过上述分析,已有的复杂网络上的投影同步研究存在如下3个问题值得进一步探索。首先,比例因子的设定过于苛刻。在以往研究中,都假定投影同步的比例因子是一致的[10-14]。对于具有非一致比例因子的情形,还未见有相关研究工作。其次,为了实现给定比例因子下的投射同步,往往需要追加较强的非线性控制器,并且需要控制网络的大部分节点,甚至所有节点[11]。从实际应用的角度来看,控制代价过大。
为了解决上述问题,开展了以下主要工作:1)为了实现相继投影同步这种具有非一致比例因子的同步方式,构建了一类新的驱动响应网络模型。2)制定线性反馈控制策略,将相继投影同步控制到所期望的状态。利用Lyapunov函数方法,获得了相继投影同步的全局稳定性条件。结果表明,只要耦合强度足够大,那么仅控制响应网络中的任意一个节点,就可以实现该驱动响应网络上的相继投影同步。否则,需要控制多个节点。3)借助数值仿真分析,检验了相继投影同步理论的准确性。
1 网络建模及预备知识
构建如下的驱动响应网络:
(1)
以及
(2)

由上述介绍,驱动响应网络(1)-(2)具有以下特点:(i)响应网络中的所有节点与驱动系统的状态分量x0(t)具有一致的局部动力学行为;(ii)响应网络具有分布式的耦合项;(iii)响应网络的耦合方式依赖于节点的编号和比例因子。当比例因子β=1时,驱动响应网络(1)-(2)退化为已有的网络模型[10-12]。

定义1(相继投影同步的全局稳定性) 对任意的初始条件xi(0),i=0,1,2,…,n和y0(0),若驱动响应网络(1)-(2)的解满足
(3)
其中i=1,2,…,n,则称相继投影同步是全局渐进稳定的。进一步,若存在W>0,α>0,t0>0,使得
(4)
对所有的t>t0都成立,则称相继投影同步是全局指数稳定的。如果相继投影同步是全局渐进稳定的或者全局指数稳定的,则称驱动响应网络(1)-(2)实现了全局的相继投影同步。
本文的主要研究目标就是探索简单高效的控制方法,获得可靠的网络参数条件,使得驱动响应网络(1)-(2)实现全局的相继投影同步,且相继投影同步到目标状态x0(t)。为了后续理论分析的需要,接下来介绍一些预备知识。
对任意实方阵G,定义矩阵Gs=(G+GT)/2为G的对称部分。对于实对称矩阵G,不等式G<0表示G是负定的。设G为实对称n×n矩阵,它的特征值按从小到大排序为λn(G)≤λn-1(G)≤…≤λ1(G)。In为n阶单位矩阵。
由文献[18]的推论4.3.12(242页),可得如下引理1。
引理1已知G,H为n阶实对称矩阵,若H半正定,则λi(G)≤λi(G+H),i=1,2,…,n,其中等号对于某些i成立,当且仅当H是奇异的,且存在非零向量y使得Gy=λi(G)y,Hy=0,以及(G+H)y=λi(G+H)y同时成立。
引理2已知对称矩阵A=(aik)∈Rn×n不可约,Rank(A)=n-1,且行和皆为零。记Di(d)为第i个主对角元为d且其它对角元皆为零的n阶对角矩阵,其中d≥0。以下结论成立:
1)A-Dj(d)<0,其中d>0,j=1,2,…,n。 2)对任意j∈{1,2,…,n},若d>d′≥0,则λi(A-Dj(d))≤λi(A-Dj(d′)),i=1,2,…,n。
3)对任意j,k∈{1,2,…,n}且j≠k,d>0,有λi(A-Dj(d)-Dk(d′))≤λi(A-Dj(d)),其中i=1,2,…,n。
证明1)由文献[19]知道,λ1(A)=0,λi(A)<0,i=2,3,…,n。由引理1,可知λi(A-Dj(d))≤λi(A),于是λ1(A-Dj(d))≤0,且λi(A-Dj(d))<0,i=2,3,…,n。从而,只需要证明λ1(A-Dj(d))<0。假设λ1(A-Dj(d))=0,由引理1,一定存在y≠0,使得Ay=λ1(A)y,且Dj(d)y=0。下面说明,这是矛盾的。一方面,由于A满足行和为零,由Ay=λ1(A)y=0,可得到特征向量y=α(1,1,…,1)T,其中常数α≠0。另一方面,由Dj(d)y=0,得到α=0。此矛盾说明λ1(A-Dj(d))<0,从而A-Dj(d)<0。
2)显然,Dj(d-d′)是半正定的。由引理1,可知λi(A-Dj(d))≤λi(A-Dj(d)+Dj(d-d′))=λi(A-Dj(d′))。
3)Dk(d′)是半正定的。由引理1可知,结论成立。
引理3[18]对于任意实对称n×n矩阵G和H,其特征值满足λk(G)+λn(H)≤λk(G+H)≤λk(G)+λ1(H),其中k=1,2,…,n。
2 主要结论
依定义1,定义相继投影同步误差:
ei(t)=x0(t)-βi-1xi(t),i=1,2,…,n。
定理1设计如下线性反馈控制器:
ui(t)=cdiei(t),
(5)
式中,反馈增益di≥0,i=1,2,…,n。令U={i1,i2,…,ip},且di>0,i∈U;di=0,i∉U。对任意给定的耦合强度c>0,若存在t0,当t>t0时,控制增益满足
c(A-D(β,d1,d2,…,dn))⊗Im+In⊗
Ms(y0(t))<0,
(6)
其中对角阵
则驱动响应网络(1)-(2)的相继投影同步是全局指数稳定的。
证明在控制法则(5)下,驱动响应网络(1)-(2)的相继投影同步误差系统为
cdiei(t)]=M(y0(t))ei(t)-cβi-1diei(t)+
(7)
构造如下的Lyapunov函数:
(8)
沿着误差系统(7)的轨线,对Lyapunov函数关于时间t求导可得
(9)

Ms(y0(t))e(t)+c(A-D(β,d1,d2,…,dn)⊗
Im]e(t)≤-εeT(t)e(t),
(10)
其中,‘⊗’为矩阵运算中的Kronecker积。不等式(10)两边在[t0,t]上积分,可得V(t)≤V(t0)exp{-2ε(t-t0)},表明V(t)=O(exp{-2εt}),从而驱动响应网络(1)-(2)的相继投影同步是全局指数稳定的。证毕。
注1一般来说,时变的矩阵不等式是难以判断的。不过对于矩阵不等式(6),由于系统(1)最终有界,所以只需在其混沌吸引子上判定是否成立。
注2事实上,定理1给出了牵制节点的选取方法。这里只需控制第i1,i2,…,ip个节点,当邻接矩阵、耦合强度和控制增益满足不等式条件(6)时,就能保证相继投影同步的全局稳定性。 Horn等[18]利用牵制控制方法,研究了网络上的投影同步问题,但是并没有给出受控节点的选取方法,在应用上上面讨论控制方法更具可操作性。
事实上,由引理2的结论(1),当耦合强度较大时,这里只需要控制任意一个节点,就能保证相继投影同步的全局稳定性。下面的结论说明了这一点。
定理2任选i0∈{1,2,…,n},线性反馈控制器由(5)给出,且满足di0>0,i=i0;di=0,i≠i0。对任意给定的反馈增益di0>0,若存在t0,当t>t0时,耦合强度满足
(11)
则驱动响应网络(1)-(2)的相继投影同步是全局指数稳定的。
证明由定理1,只需证明
λ1(In⊗Ms(y0(t))+
c(A-βi0-1Di0(di0))⊗Im)<0。
由引理1,以及Kronecker积的性质,可知,
λ1(In⊗Ms(y0(t))+c(A-βi0-1Di0(di0))⊗
Im)≤λ1(In⊗Ms(y0(t)))+cλ1((A-
βi0-1Di0(di0))⊗Im)=λ1(Ms(y0(t)))+
cλ1(A-βi0-1Di0(di0))。
由引理2的结论(1),知
λ1(Α-βi0-1Di0(di0))<0。
于是,式(11)成立时,必有
λ1(In⊗Ms(y0(t))+c(A-βi0-1Di0(di0))⊗Im)<0。定理得证。
注3由假设1,当t≥t0时,λ1(Ms(y0(t)))必定有界,从而(11)的右边一定有界。只要耦合强度足够大,就有(11)成立,也就是说,只需要控制任意一个节点,就能保证相继投影同步的全局稳定性。对于耦合强度较小的情形,由引理2的结论(2),(11)的右边关于di0是单调递减的,那么可以通过尝试调大di0使得式(11)成立。如果足够大的di0仍然不能够使得式(11)成立,那么由引理2的结论(3),可以在控制第i0个节点的基础之上,进一步增加受控节点,来减小λ1(A-D(β,d1,d2,…,dn)),以使(6)满足,从而保证相继投影同步的全局稳定性。
3 仿真检验
(12)
其中:参数σ=10,α=28,b=(8/3),
f(x0(t),y0(t))=-by3(t)+y1(t)y2(t),且
(13)
响应网络大小为n=5,其耦合矩阵选取为
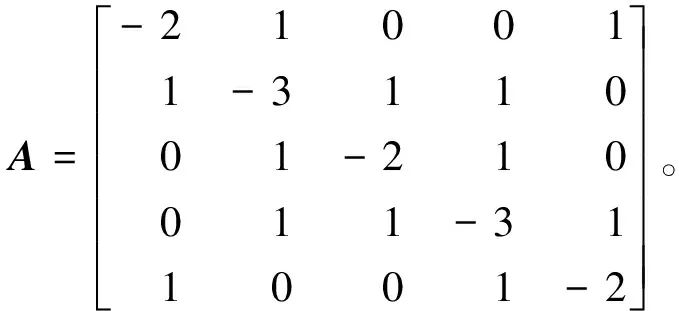
(14)
计算得到
λ1(Ms(y0(t)))=
Horn等[18]给出了Lorenz系统(12)的混沌吸引子的球体估计,在吸引子上一定有
-R1+σ+α≤y0(t)≤R1+σ+α,
λ1(Ms(y0(t)))≤
方便起见,只考虑控制第一个节点,即U={1},且设定控制增益d1=20。计算得到
λ1(A-D1(d1))=-0.374 3。
由定理2可知,只要耦合强度满足
c>-14.634/(-0.374 3)≈39.097,
那么在任意的比例因子下相继投影同步都是全局指数稳定的。定义相继投影同步的整体误差为
任意选取初值xi(0)∈[0,1]2,y0(0)∈[0,1]。
当设定c=35,β=2时,图1给出了同步误差的变化情况,其中比例因子β=2。可见它能迅速收敛到零。图2给出了各个节点的相图,为了区分,第i个节点的相图向下平移了50i,其中i=0,1,…,5。可见第i个节点和第i+1个节点刚好相差一个比例β=2。当设定c=35,β=0.5时,图3给出了同步误的变化情况。同样,它能迅速收敛到零。图4给出了各个节点的相图,为了区分,第i个节点的相图向下平移了300i,其中i=0,1,…,5。可见第i个节点和第i+1个节点刚好相差一个比例β=0.5。
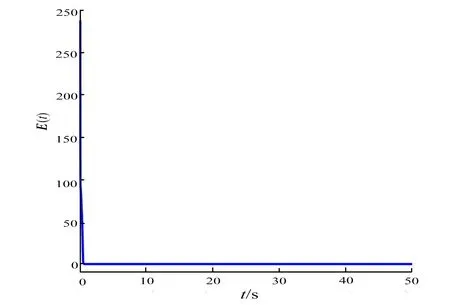
图1 相继投影同步误差
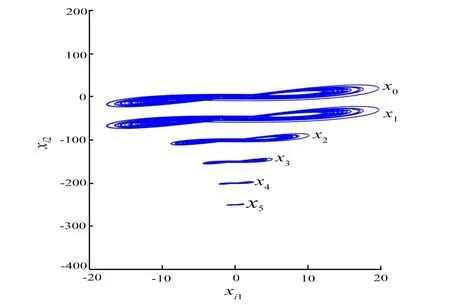
图2 网络节点的相图
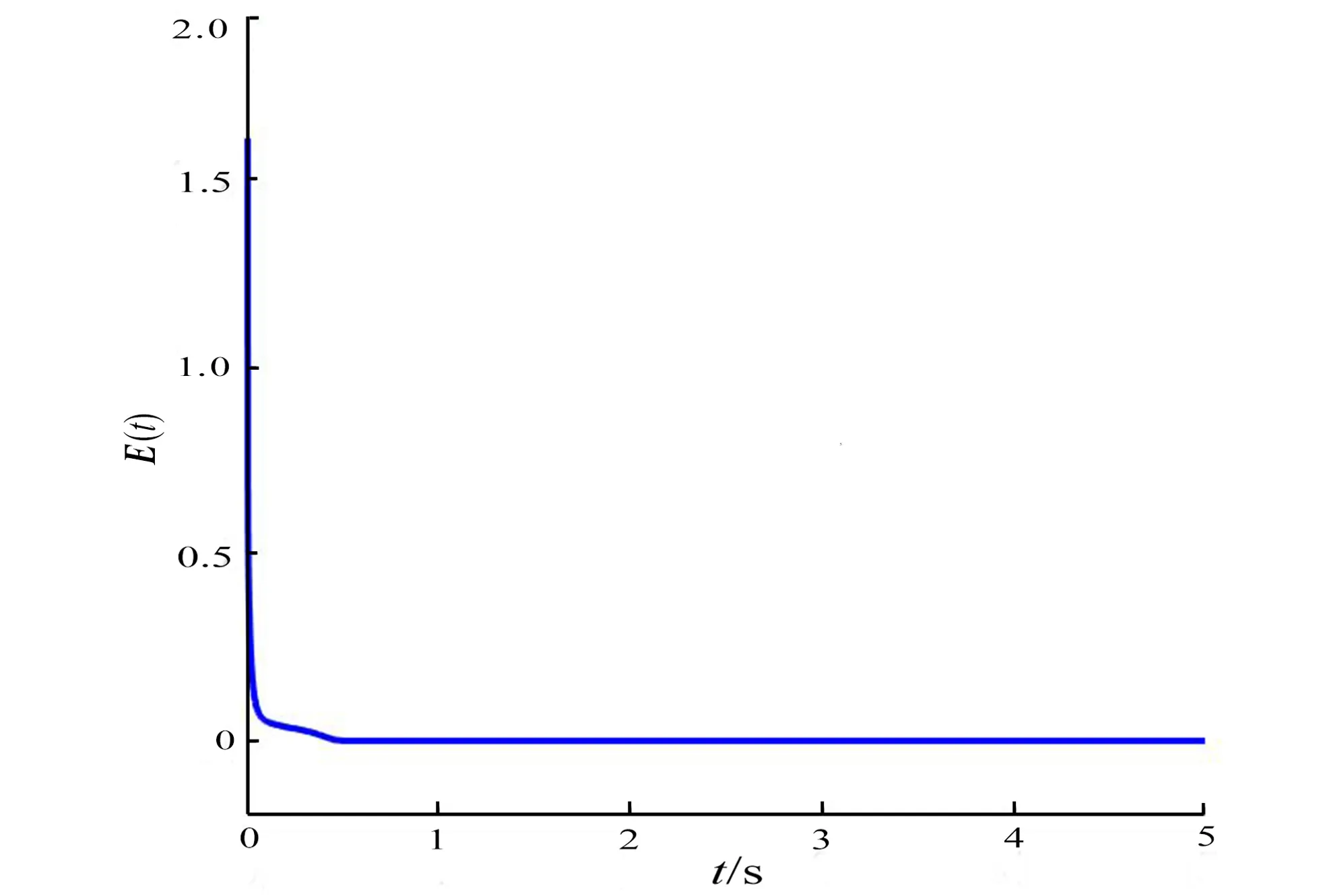
图3 相继投影同步误差
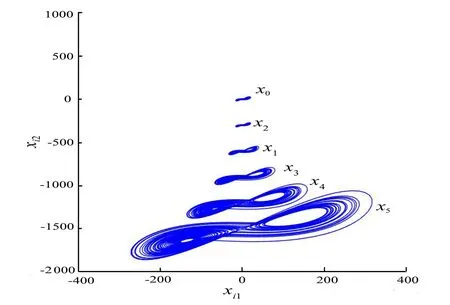
图4 网络节点的相图
4 结束语
为了实现网络上的相继投影同步,提出了一类新的驱动响应网络模型。各节点按照分布式耦合方式进行扩散耦合,边的权重依赖于给定的比例因子和节点编号。为了使网络节点相继投影同步到目标状态,分别设计了线性反馈控制策略。利用Lyapunov函数方法和矩阵理论,获得了一系列相继投影同步的全局稳定性判据。结果表明,当耦合强度较大的时候,这里只需要控制响应网络中的任意一个节点,就能保证相继投影同步的全局稳定性;否则,需要控制多个节点,并且给出了受控节点的选择方法。
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:07:12
数学物理学报(2022年2期)2022-04-26 14:08:04
小学生学习指导(高年级)(2021年3期)2021-04-06 08:49:44
数学物理学报(2021年1期)2021-03-29 03:14:42
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25 01:40:34
学生天地·小学低年级版(2019年5期)2019-06-05 01:15:11
学生天地(2019年15期)2019-05-05 06:28:28
金桥(2018年4期)2018-09-26 02:24:54
红土地(2016年7期)2016-02-27 15:05:54
中国卫生(2014年7期)2014-11-10 02:33:04