
AMT挡位位置自学习控制算法研究
2021-04-23 01:10王澍龙文健峰
客车技术与研究 2021年2期
王澍龙, 石 魏, 文健峰,2, 赵 铃
(1.中车时代电动汽车股份有限公司, 湖南 株洲 412000; 2.长沙中车智驭新能源科技有限公司, 长沙 410000)
AMT全称为机械式自动变速器,是在传统机械式变速器上加装一套电控换挡执行机构[1-3],现已逐步应用于各种车型上。如何实现准确、快速、高品质换挡是AMT控制策略的核心,而如何准确获取各挡位位置成为AMT控制的关键。目前主要是通过AMT控制软件的自学习来解决这个问题。如何能精确地自学习到各挡位位置是本文研究的重点。
在实际应用中,由于加工和装配误差的原因,使得每台变速器中各挡位位置存在一定的差异,而且长期使用引起的机械磨损也会导致同一台变速器各挡位位置发生一定的变化,这就要求自学习算法具有很强的自适应性。本文从同步环式机械变速器内部机械结构进行分析,针对其特有的自锁机构以及同步环结构,开发一套自学习控制算法,能精确学习到各挡位位置,同时也能适应因加工、装配误差以及使用磨损等因素导致挡位位置不一致的问题,提高AMT控制系统的精度、鲁棒性以及换挡成功率[4-5]。
1 AMT变速器换挡原理
目前电动汽车领域使用的同步环式机械变速器的换挡过程如图1所示。换挡执行机构推动结合套与同步环靠近,与同步环接触时,开始同步,此位置即为AMT控制中关注的同步点位置。在驱动电机转速与变速器转速同步后,结合套与同步环啮合,换挡执行机构继续推动结合套与齿圈啮合,换挡完成[6-8]。

(a) 空挡状态

(b) 同步过程
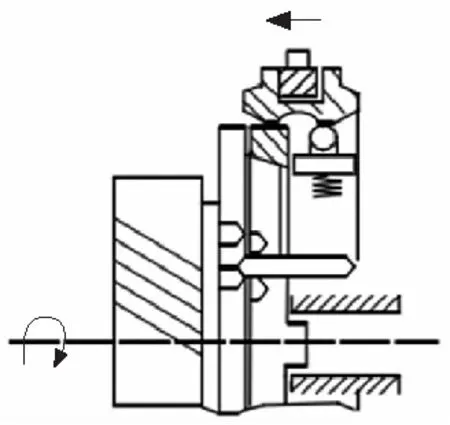
(c) 结合套与锁环啮合

(d) 结合套与齿圈啮合
在换挡完成后,为防止脱挡,变速器都设计了自锁机构,如图2所示,自锁机构由换挡杆上自锁槽以及钢球、弹簧组成。其工作原理:以空挡挂1挡为例,首先换挡执行机构推动换挡杆克服空挡自锁槽的阻力[9-10],脱离空挡。当结合套与齿圈啮合后,如果控制精确,钢球正好落在一挡自锁槽内,即实现自锁。

图2 同步环式机械变速器挡位位置
目前市场采用的换挡执行机构基本都具有自锁功能,即运行到指定位置后,不能再反向移动,这就要求各挡位的实际位置必须足够精确,以便换挡时能精确到达每个挡位的自锁槽位置,即各挡位的精确位置。
2 AMT挡位位置自学习算法
2.1 位置传感器信号与物理位置的关系
本文主要针对四挡AMT变速器进行研究,采用的换挡执行机构取消了选挡环节。通过两个电机分别控制两根换挡杆移动,通过位置传感器采集换挡杆的位置信号,确定换挡杆移动距离,传感器电压值与换挡杆实际移动距离如图3所示。
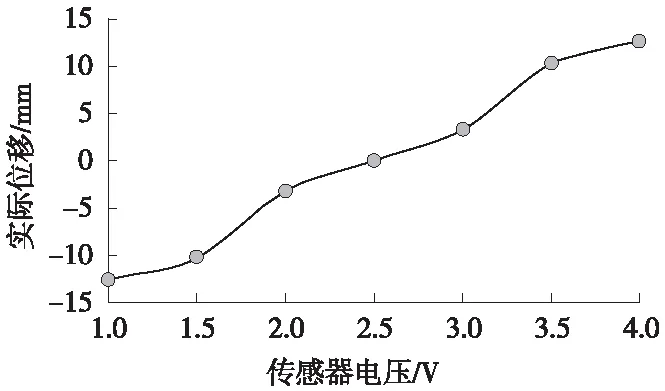
图3 位置传感器信号与实际位移关系
2.2 关键位置自学习
关键位置包括变速器挡位极限位置、精确位置和同步点位置。极限位置指的是各挡位的机械极限位置,此值在AMT控制中只作为限定阈值;精确位置指的是上述自锁槽位置。这是AMT控制中目标换挡位置,其值的精确性直接决定换挡成功率以及脱挡概率;同步点位置是结合套与同步环开始接触的位置,其值影响换挡过程的平顺性。
根据变速器内部结构,自行设计了自学习控制算法。对于极限值自学习,以一挡位置为例,其算法逻辑如图4所示。根据自学习记录的位置1和位置2,取其中的最大值作为一挡极限位置。
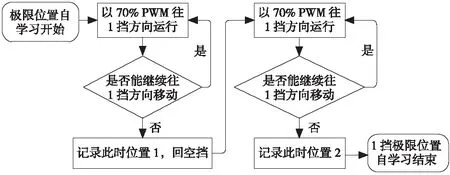
图4 一挡极限位置自学习算法逻辑
对于精确位置的自学习算法相对比较复杂,主要考虑自锁槽的机械特性。由于自锁装置的存在,在进挡过程中,当钢球落入自锁槽内时,如果要进一步向前推动,则需要很大的力,由此来判定是否已到达精确位置点。同样以一挡位置为例,设计其算法逻辑如图5所示。自学习完成后,将保存的位置点数据存入TCU的EEPROM里,以便后续调用。
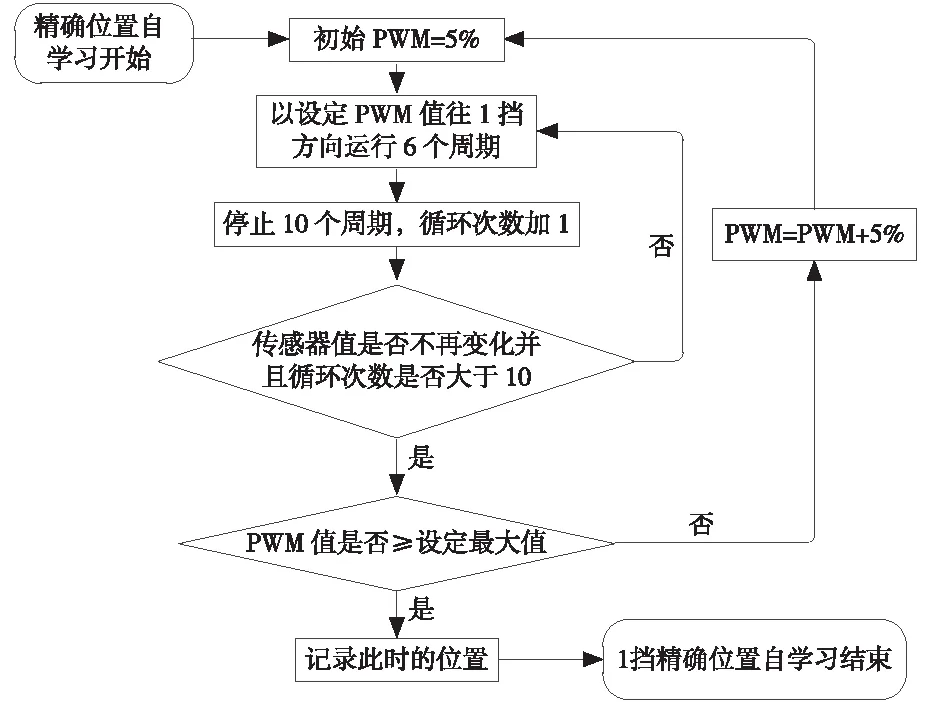
图5 一挡精确位置自学习算法逻辑
在电机与变速器开始同步时,进挡阻力加大,在未完全同步前,此阻力将一直存在。为了学习到同步点这个位置,需要让电机维持一定转速,保证此阻力一直存在。同样以一挡位置为例,设计其算法如图6所示。自学习完成后,将保存的位置点数据存入TCU的EEPROM里,以便后续调用。
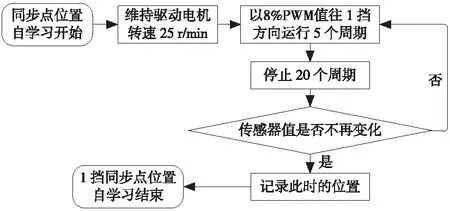
图6 一挡同步点位置自学习算法逻辑
3 试验验证
3.1 极限位置与精确位置自学习验证
本次试验采用某四挡AMT变速器,针对1、2、3、4挡的极限位置和精确位置进行自学习,其结果如图7所示。其中1、2挡共用一个位置传感器,3、4挡共用一个位置传感器。各位置信号用位置传感器电压表示,见表1。
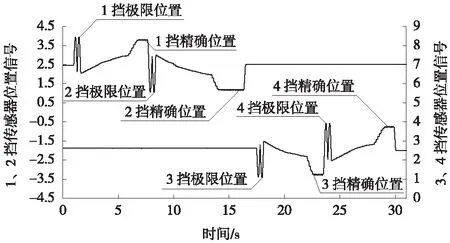
图7 各挡位极限位置与精确位置自学习数据曲线

表1 各位置传感器电压信号 V
对于空挡位置,由于变速器的1、2挡,以及3、4挡都是对称分布的,在这里分别取1、2挡精确位置的平均值作为1、2挡空挡位置,3、4挡精确位置的平均值作为3、4挡空挡位置。
从图7可以看出,极限值与精确值的自学习时间在30 s左右,无论是离线还是在线自学习,都能满足要求。另外,为验证算法的稳定性,对同一变速器进行了5次自学习,4个挡位的自学习位置结果值一致性良好。
3.2 同步点位置自学习验证
对于同步点的自学习数据如图8所示,自学习时间在10 s左右(10 s后自学习已结束),能满足离线和在线自学习要求。从图中可以看到,1、2、3、4挡的同步点自学习位置传感器电压分别为2.956 V、1.951 V、2.179 V、2.820 V;1挡和2挡、3挡和4挡的同步点轴对称分布,符合变速器机械特性。

图8 各挡位同步点自学习数据曲线
4 结束语
试验结果表明,整个自学习过程不到1 min,AMT变速器挡位自学习算法能够快速实现各挡位精确值、极限值以及同步点位置的自学习。这样可以避免在AMT系统出厂调试以及装车调试时重复标定,节省了大量的时间,同时也能避免人员操作出现错误。
猜你喜欢
汽车实用技术(2021年12期)2021-07-03
汽车维护与修理(2019年4期)2019-03-07
中国测试(2018年9期)2018-05-14
科技与创新(2017年5期)2017-03-28
科技视界(2016年2期)2016-03-30
电子产品世界(2016年3期)2016-03-29
中国高新技术企业(2015年17期)2015-05-18
试题与研究·中考物理(2014年3期)2015-05-11
