光学相控阵相位驱动电路的设计与实现
2021-04-22 09:12张蓝萱李德辉石景龙
吉林大学学报(信息科学版) 2021年2期
侯 宇, 陶 敏, 张蓝萱, 李德辉, 石景龙
(吉林大学 电子科学与工程学院, 长春 130012)
0 引 言
激光雷达作为一种先进探测仪器, 利用激光穿透能力强、 数据精度高、 受外界因素干扰小等优点, 拥有无可比拟的优越性能, 目前广泛应用于对气象水域的勘探监测、 地理环境的3D点云建模、 军用目标识别与探测等[1-3]。雷达主要分为机械式激光雷达和固态激光雷达。机械式激光雷达利用机械结构实现波束扫描, 但其扫描速度和精度都受机械结构限制。固态激光雷达摆脱了机械结构的束缚, 其内部通过控制光学相控阵(OPA: Optical Phased Array), 从而改变光束的指向方向实现扫描[4-5]。
OPA是固态激光雷达的核心控制器件, 是一种不需要使用任何机械部件即可实现光束偏转的控制装置[6]。并且其应用前景广泛, 在光学传感器、 光探测和测距器件、 全息显示和光束角度转向等方面都有应用价值。OPA的研究方向主要有液晶[7]材料和锆钛酸铅镧陶瓷[8]材料和光波导相控阵[9]。本系统所控制的OPA就是光波导相控阵[10], 其主要由金属氧化物半导体和硅材料组成, 具有驱动电压低, 扫描角度广, 响应速度快等优点。光波导相控阵主要通过控制OPA芯片中波导的折射率, 改变光束的偏转从而实现扫描。光学相控阵作为固态激光雷达的核心部件, 逐渐成为研究的主流热点, 对其驱动电路的研究也愈加重要。
为了驱动OPA, 笔者采用两种驱动方式完成对相位的精准控制。一种是通过电流源驱动方式, 其优点是通过电流直接对相位单元进行控制, 输出电流不随负载变化而变化, 在OPA各个波导的加热丝电阻不一致时功率控制更加容易, 抗噪声能力强; 缺点是电路结构复杂, 需要使用3个放大器作为电流源的组成部分[11]。另一种为电压源的驱动方式, 其优点是结构简单, 每路电压源仅使用一个放大器; 缺点是抗噪声能力差, 当负载电阻较小时, 功率控制精度较低[12]。但整体看这两种驱动电路可靠性强、 成本较低、 易于实现。
1 OPA相位控制原理
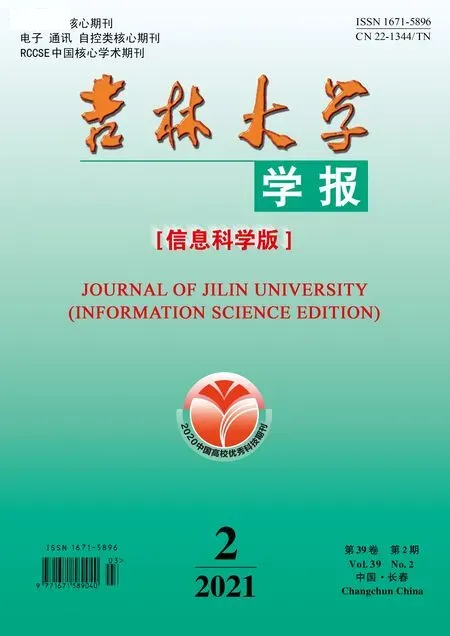
如图1所示, OPA是一种以阵列形式排布的光输出控件, 其原理类似于多缝夫琅禾费衍射, 通过控制每个单元的相位可实现对光束的扫描。OPA的相位控制电路需要大规模相位控制驱动单元, 每个单元要求独立控制电信号变化。同时也要求每个单元的控制范围宽, 精度高, 才能完成对光束相位的精准控制[7-8]。
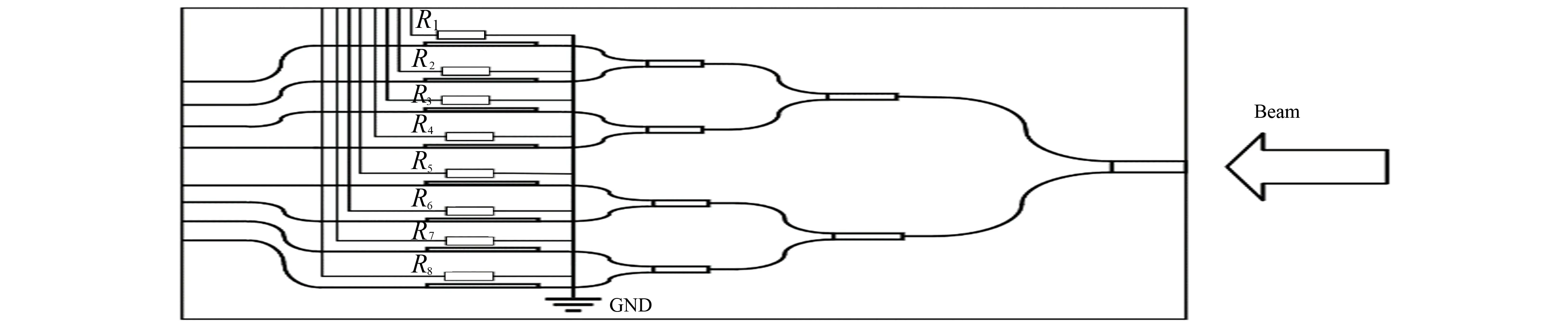
图1 OPA相位控制原理图Fig.1 OPA phase control schematic diagram
OPA相位的控制, 一般是通过控制加载在光波导下介质的电流或电压产生热量从而改变波导的折射率实现的, 波导的相位改变, 衍射条纹主极大的位置改变, 即实现了光束的扫描。硅基光学相控阵芯片内的加热调相单元, 采用多个独立的热金属丝对上方光波导进行加热, 每个金属丝都有各自的独立电极对其进行控制。因为热量与温度为线性关系, 对金属施加电信号即可完成对光波导的加热及对光波导的相位调节。
假设其中一个波导旁边的金属丝的电阻为R, 用电流为I的电流源驱动或电压为U的电压源驱动, 则加热t时间波导所产生的热量为

(1)
波导上所产生的热量导致其温度发生改变, 温度改变从而导致光波导折射率n发生改变, 假设光波导n和温度T之间的关系为
n=f(T)
(2)
其中函数f(T)可参考文献[13]。改变光波导折射率n即可改变光束在波导中传输速度和各路光束传输速度, 从而改变各路光束输出相位差及光束扫描位置。
根据OPA的调相原理设计了OPA相位控制电路。
2 OPA相位控制电路的设计
2.1 多通道可控电流源
光学相控阵芯片在相位调制时需大规模、 宽范围和高精度的电流源驱动, 整个电流源控制系统如图2所示, 包括由MCS51单片机组成的MCU(Microcontroller Unit)最小系统模块, 数模转换电路模块和压控电流源电路。其原理是上位机将数据通过串口发送到单片机中, 单片机将串口数据进行解码处理再发送给数模转换模块, 得到电压数据的数模转换模块再将相应的电压值输出到压控电流源电路, 以得到相应的电流值, 从而驱动光学相控阵芯片, 完成对光学相控阵芯片中铜丝的加热,达到对相位控制的目的。
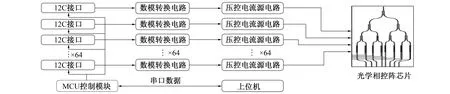
图2 电流源系统结构图Fig.2 Structure of current source system
图3 电流源控制电路原理图Fig.3 Schematic diagram of current source control circuit
电流源电路的设计如图3所示, 采用4通道的数模转换芯片DAC5573作为电压输出控制端, DAC5573的采样速率可达188 kHz。它采用IIC时序, 单片机通过IIC接口与DAC芯片相连, DAC再将模拟电压输出到压控电流源电路中。压控电流源电路由仪表放大器AD620、 两个高输出放大器LM7332和一个取样电阻Res组成, 通过改变对仪表放大器的电压输入, 即可改变运算放大器的电流输出[14-15]。
AD620仪表放大器的输出电压为Vout, 其中G为增益系数, 与外接电阻Rg有关, 则有
Vout=G(Vin+-Vin-)+Vref
(3)
(4)
运算放大器的输出电流即为流经负载的输出电流I, 即有

(5)
其中RRes为取样电阻。
2.2 多通道可控电压源
电压源组成如图4所示, 主要包括由单片机组成的最小系统模块, DA模块, 电压跟随器电路。电压源工作原理与电流源类似, 上位机将电压数据通过串口发送到单片机中, 单片机将串口数据进行解码处理再发送给数模转换模块, 得到电压数据的数模转换模块再将相应的电压值输出到电压跟随器电路中, 以完成输出能力的放大, 功率放大电路最后将电压值输出到光学相控阵芯片中, 以完成对相位的控制。
电压源的电路设计。电压源驱动电路采用LTC2664作为DAC驱动电路的组成部分, LTC2664采用SPI通讯与单片机连接, SPI为全双工串口, 通讯速度相比DAC5573的SPI的单工通讯效率有很大提升, 采样速率可达50 MHz。利用电压跟随器电路将DAC的驱动能力提高, 由运放电路组成的电压跟随器具有很高的开环增益和极高的输入阻抗及极低的输出阻抗, 在驱动大电流负载时, 在运放内部几乎不会造成压降。运算放大器采用AD8397。AD8397是一款双路具有高线性电流输出的运算放大器。当驱动32 Ω的负载时最高可输出310 mA的峰值电流, 以满足光学相控阵芯片的驱动需求[16-18]。
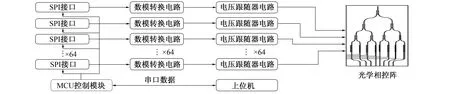
图4 电压源系统结构图Fig.4 Structure of voltage source system
3 测试方法与实验结果
3.1 电流源测试
对电流源输出特性进行测试。在测试过程中, 将DAC5573配置为0~3.3 V的输出范围, 将电流源电路输出串联一个50 Ω的负载电阻, 对电流源输出进行线性调节, 将电流表串联到输出电路中进行试验测试。电流源精度可达0.1 mA, 将输出电流值与预设电流值进行数据处理, 得到电流源线性输出如图5所示, 输出电流误差百分比如图6所示。从图5、图6可以得出, 电流源线性度良好, 基本拟合电流预设值曲线, 大部分的电流误差变化都小于3%, 因此电流源设计满足要求。
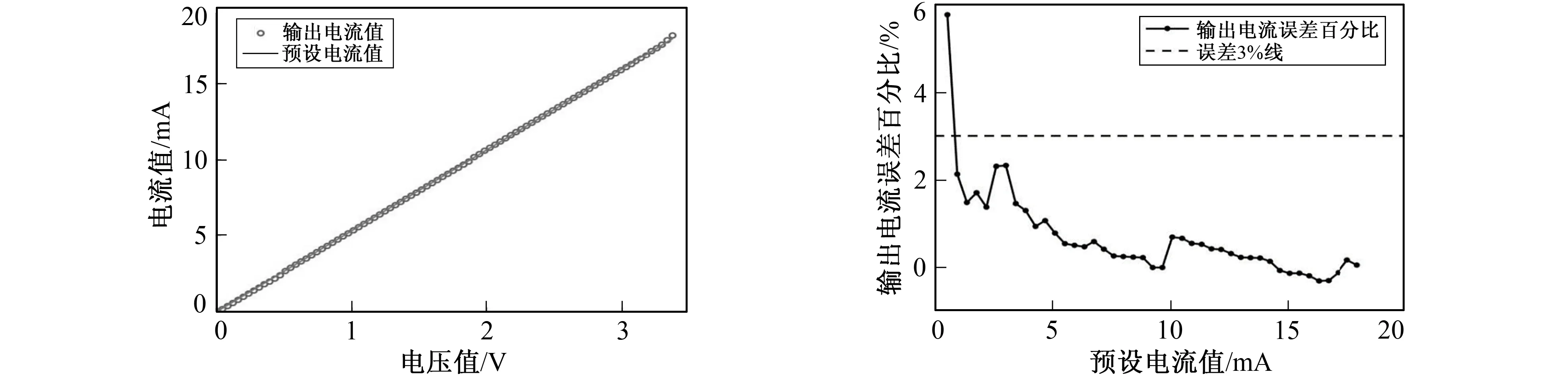
图5 预设电流与输出电流趋势比较 图6 输出电流误差百分比图 Fig.5 A comparison of default current and output current trends Fig.6 Figure of output current error percentage
3.2 电压源测试
对电压源的输出特性进行测试。在测试过程中, 也将电压源输出驱动一个50 Ω的负载电阻, 对LTC2664输出配置为0~10 V的电压输出范围, 将万用表档位调至10 V, 测试结果显示, 电压源精度可达2 mV。将电压预设值与实际输出值进行数据处理, 得到电压源线性输出如图7所示, 输出电流误差百分比如图8所示。

图7 预设电压与输出电压趋势比较 图8 输出电压误差百分比图 Fig.7 Comparison of preset voltage and output voltage trend Fig.8 Figure of output voltage error percentage
从图7、图8可以得出, 电压源线性度良好, 基本拟合电压预设值曲线, 大部分的电流误差变化都小于1%, 因此电压源满足设计要求。
3.3 光学相控阵调相测试
将控制驱动电路对光学相控阵(OPA)芯片进行调试。在测试过程中, 上位机通过驱动电流源控制电路改变芯片各路电阻的温度值, 从而改变各路波导折射率的变化, 对各路光束输出相位进行调制, 达到光束偏转的目的。图9为OPA系统测试示意图与远场光强分布图。测试结果显示, 利用笔者所设计的驱动电路, 对光学相控阵每根波导相位分别进行控制, 可实现角度扫描, 并且主瓣光强度良好。因此电源可以实现对光学相控阵芯片的相位控制。
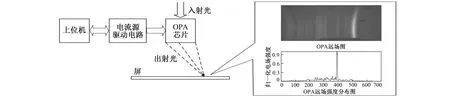
图9 OPA测试示意图及OPA远场强度图Fig.9 OPA test diagram and OPA far field strength diagram
4 结 语
笔者提出两种关于OPA芯片的电路驱动方案, 设计并完成了电路系统, 并对驱动能力进行了验证分析, 最后对光学相控阵进行了驱动测试。由电路测试结果可知所设计的电流源大部分的输出误差小于3%, 电压源输出误差小于1%, 两种驱动电路的输出线性度都表现十分良好; 在光学相控阵系统测试实验中发现, 光束可以实现偏转, 主瓣强度保持良好。因此试验结果证明驱动电路满足设计要求。两种驱动电路在性能上均具有线性度好、 范围宽、 精度高等优点, 同时模块小, 在光学相控阵固态激光雷达系统中有一定的应用价值。
猜你喜欢
阅读(科学探秘)(2022年5期)2022-06-07
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
奥秘(2021年3期)2021-04-12
河北省科学院学报(2020年1期)2020-05-25
电子制作(2019年24期)2019-02-23
光学精密工程(2016年6期)2016-11-07
现代防御技术(2016年1期)2016-06-01
制导与引信(2016年3期)2016-03-20
火控雷达技术(2016年1期)2016-02-06