球盘接触脂润滑试验台的运动控制研究*
2021-04-20 09:07陈英俊黄文华何照荣吴金华关依翔
润滑与密封 2021年4期
陈英俊 黄文华 何照荣 吴金华 关依翔
(1.广东石油化工学院机电工程学院 广东茂名 525000;2.茂名华粤机电设备有限公司 广东茂名 525000)
润滑膜用于防止摩擦副界面直接接触,减少摩擦,降低磨损。为了研究润滑膜的承载能力,须通过润滑试验台测试润滑脂的润滑性能。采用钢球和透明玻璃盘组成点接触摩擦副,利用光干涉法测量润滑膜厚度是研究润滑剂润滑性能和润滑机制的最有效方法之一[1-2]。目前关于球盘润滑接触试验台的文献多是针对油润滑的场合,关于脂润滑试验台的文献并不多见[3-4]。当润滑剂为润滑脂时,因为润滑脂具有强烈的非牛顿流体性质和触变性,使得测量结果具有不确定性[5-7]。只有精确控制摩擦副的运动,实现特定的运动规律,才能获得可以复现的、稳定的测量结果[8-9]。本文作者研究球盘接触脂润滑试验台的运动控制方法,试图精确方便地实现摩擦副的运动控制,从而获得稳定可靠的润滑试验结果。
1 试验台的测量原理与主轴结构
1.1 试验台的测量原理
光干涉法是一种被广泛使用的、有效测量润滑膜厚的方法。光干涉测量膜厚的基本原理:入射光线分别在摩擦副的钢球和玻璃盘接触面上产生反射,反射之后的两列相干光相遇产生干涉条纹,而条纹的亮度、颜色和干涉的级数等反映了膜厚的大小。如图1所示为光干涉测量膜厚的原理示意图[10]。

图1 光干涉法测量润滑膜厚度的原理[10]
设经半反半透膜反射的光线①和经钢球反射后透过半反半透膜光线②是两束相干光,相遇会产生光干涉现象。设润滑膜厚为h,润滑剂的折射率为nd,入射光的波长为λ,两束光的初始相位分别为φ1、φ2,光强分别为I1、I2,合光强为I;再考虑由镀膜、钢球反射等引起的相位差,设其为φ0,则有
(1)
上式确定了干涉图像中任一点的干涉光强与该点润滑膜厚度之间的关系。这是光干涉法测量润滑膜厚度最基本的原理。使用基于单色光干涉,通过分析干涉光的光强得到润滑膜厚度的方法,即基于相对光强原理的光干涉法。某点的相对光强[11]可以表示为
(2)
可见相对光强的取值范围为[-1,1]。而根据光的波动干涉理论,有极值光强
(3)
综合式(1)、(2)和(3),整理得到
(4)
类似地将零膜厚时的光强I0转化为相对光强
(5)
因此,最后求得润滑膜厚度为
(6)
1.2 试验台的主轴结构
钢球和玻璃盘组成的点接触摩擦副接触面积小,接触宽度一般为微米量级尺寸,并且当处于弹性流体动力润滑时的润滑膜厚度一般为亚微米甚至纳米量级,所以对润滑剂测试装置的运转精度及稳定性有很高的要求。为了缩短传动链,避免机械结构零部件加工精度或者配合间隙对最终摩擦副运转精度的影响,将玻璃盘的轴作为电动机运动的主轴,即电动机通过联轴器直接带动玻璃盘同步运动,中间不设减速机构。因此,只要保证了主轴的旋转精度,就保证了玻璃盘的运转精度。设计的试验台主轴结构如图2所示[12]。

图2 试验台主轴结构
在图2中,伺服电机固定在电机支架上,电机支架固定在高平面度的光学平板上。主轴上端为2个角接触球轴承背靠背配对安装支撑,下端为单个深沟球轴承安装支撑。轴承可以通过上端角接触球轴承下方的锁紧螺母调整预紧量,从而提高轴承的刚性和台架的旋转精度。
实验证明,采用这种主轴结构时测试圆盘转动稳定、控制方便;转动时在圆盘外侧测得相对于光学平板的轴向跳动公差在±15 μm以内,径向跳动公差可忽略,为润滑剂测试提供了一种旋转精度高的测试平台。
2 试验台运动控制的目的
运行试验台通常要求能实现不同的工况条件,或者能实现特定工况下摩擦副的稳定运行,来获得润滑脂在不同工况下的润滑膜厚度及其变化规律,从而了解润滑脂的润滑性能和掌握其润滑机制。
式(6)只能用于未引起越级干涉情况下的膜厚求解,即为零级干涉级时的膜厚求解方法。实际上由于光的波动性,干涉强度随着膜厚的增加呈余弦周期性变化。图3示出了入射单色光的波长λ=600 nm时,干涉图像中心处光强I(图像灰度值)随膜厚h增加的一种可能曲线。
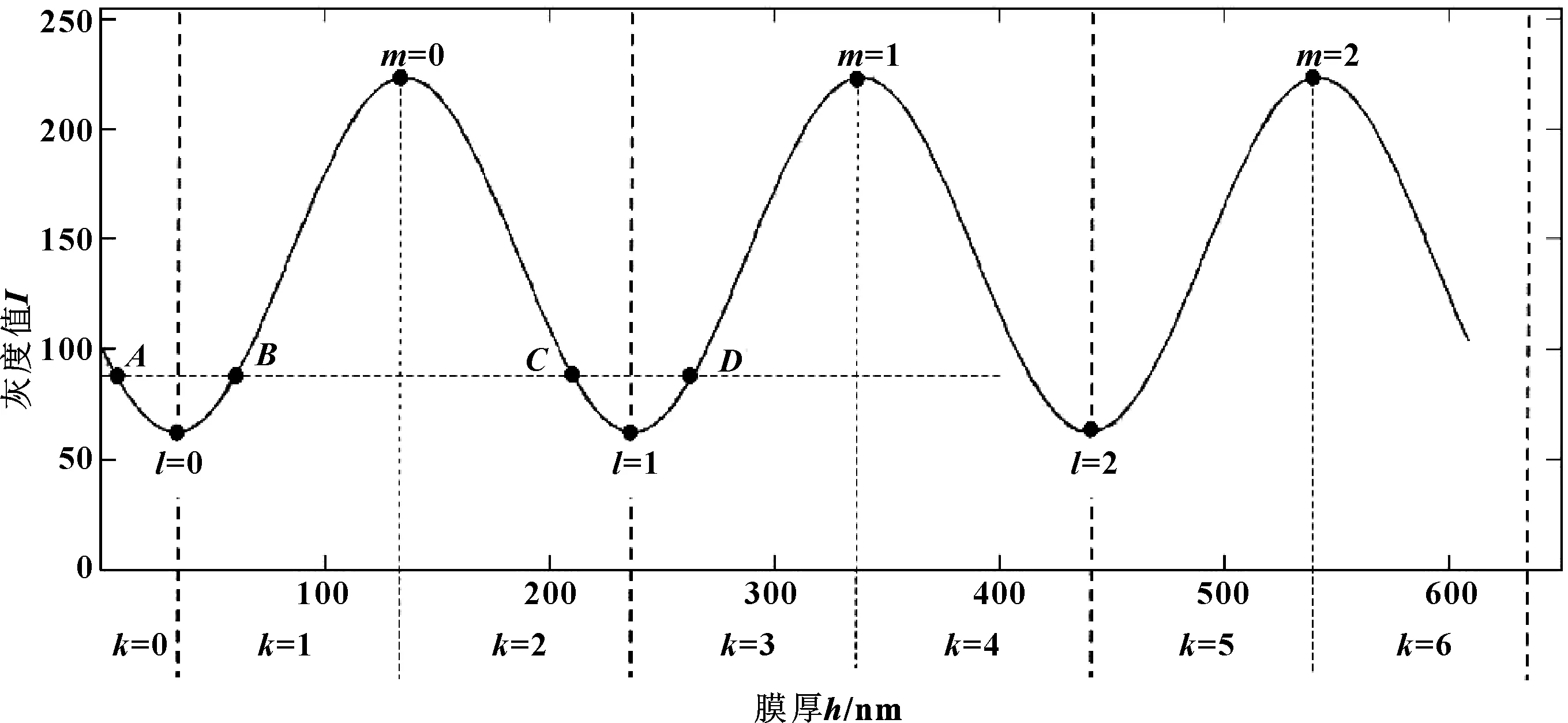
图3 某种测量条件下的光强-膜厚分布曲线(λ=600 nm)
在图3中,l=0,1,2,......为干涉图像中暗条纹的干涉级次,m=0,1,2,......为亮条纹的干涉级次,随着膜厚的增大干涉级次依次增加。文中以灰度曲线的波峰或者波谷划分为不同区间,每一区间设一个序号,称之为干涉半级k,实际任一干涉级次的膜厚计算公式[13]应为
(7)

(8)
公式(8)中速度参数U*的指数为0.67,为载荷参数W*指数(0.067)的10倍,表明速度对膜厚的影响比载荷大得多,因此试验中调节速度参数U*更容易观察到膜厚的变化。
所以为了判定干涉的级次,通常是从零膜厚开始,通过增加速度逐渐增加膜厚,同时对级数计数,从而得出当前润滑状态下的干涉级次。但是润滑膜厚度为微米级和纳米级,轻微的膜厚变化可引起干涉级次的剧烈变化,从静止状态到一定速度下的级数计数是比较困难的。文中拟采用高精度的伺服电机,通过计算机及伺服电机驱动器精确控制伺服电机从零速度开始,缓慢地、以恒定加速度加速到某一恒定速度,即所需测量膜厚的速度下,摄像机同时逐帧记录图像,从而获取足够的图像变化信息,然后分析每一帧图像中同一位置的明暗变化,最终得出干涉级次。所以,试验台运动控制的目的包括:①摩擦副特定速度下的稳定运行,能测得清晰无闪烁的光干涉图像;②摩擦副缓慢加速或者减速,方便实现光干涉级次的标定;③实现其他特定变化规律的运动控制。
3 运动控制系统的硬件构成
试验台的运动控制主要就是控制玻璃盘或者钢球的运动,实质就是控制与玻璃盘或者钢球相连接的电机的运动。常见的控制电机有交流伺服电机和步进电机,因交流伺服电机有更好的低速运动稳定性、较大的力矩和较高的控制精度[14],为了更方便准确地标定干涉级次,文中采用了交流伺服电机。另外,交流伺服电机采用了常见的位置控制法,即通过控制输入到交流伺服驱动器中的脉冲来控制交流伺服电机的动作,从而实现不同速度、方向和位移[15]。PLC作为一种成熟的工业控制器,运行稳定,晶体管输出型的PLC能够输出高频脉冲,能够满足润滑试验的需要,因此文中采用了PLC控制器。设计出的润滑试验台运动控制系统硬件构成如图4所示[16]。

图4 试验台运动控制系统硬件构成
在图4中,首先根据目标工况计算出特定的运动参数比如速度、位移、加减速时间等,然后计算机编写相应的PLC程序,由PLC控制伺服驱动器和交流伺服电机动作,电机启动的同时触发工业相机记录图像。工业相机的参数通过计算机设定,并且记录的图像存储在计算机中。在选定交流伺服电机时,必须使伺服电机的转动惯量与试验台中总的负载转动惯量相匹配,即满足以下条件平台中凡是作旋转运动的部件均为伺服电机的负载,比如玻璃盘、主轴、轴承内圈、联轴器等等,需根据前文设计的主轴结构精确计算出来,再选择具体型号的伺服电机。
JL/JM≤R
(9)
式中:JL为总的负载转动惯量;JM为伺服电机转子的转动惯量;R为伺服电机厂商推荐的负载转动惯量与转子转动惯量比值的最大值。
4 程序设计
根据试验需要,要通过程序实现电机的恒转速和从零开始的加减速(变速)运行,这2种工作方式分别对应于三菱PLC的(D)PLSY和(D)PLSR指令。恒转速指令运行时,电机切换到指定速度下稳定长期运行或者运转指定圈数后停止,此时工业相机可以记录稳态运行时的光干涉图像。加减速运行时,电机从静止以较长的加速时间,加速到指定速度,这个过程工业相机持续拍摄图像(利用这个过程中记录的图像可以确定干涉级次)。电机加速到目标速度后,可以持续运行指定圈数,然后再以相同运动规律减速到静止状态。无论是哪种工作方式,电机的转向均应可控。所以程序实现的功能包括:工作方式选择,目标速度选择,转向选择等。运动控制程序流程图及控制面板如图5所示。
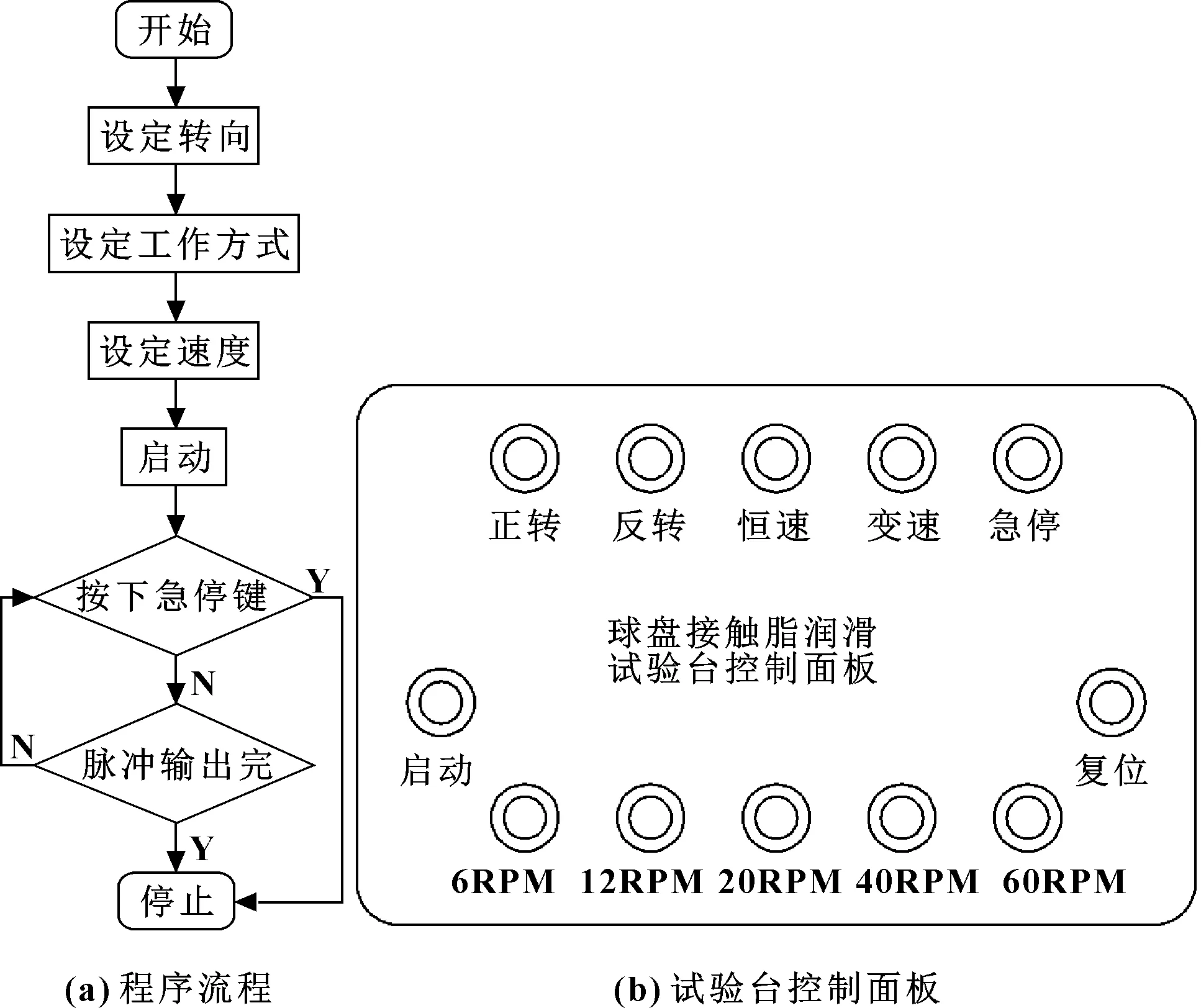
图5 运动控制程序流程及其控制面板
将测试的目标速度设置为6、12、20、40、60 r/min,能较好地覆盖常见的弹性流体动力润滑状态范围,个别润滑脂在重载低速时可能会进入边界润滑状态,轻载高速时可能会进入流体动力润滑范围,但都不影响试验台润滑膜厚的有效测量。根据电机电子齿轮参数Pr(每旋转一圈的指令脉冲数)很容易算出某一转速对应的脉冲频率,从而设置恒转速指令和变速指令需要设置的脉冲频率。指令中脉冲频率和转速之间的关系为

(10)
恒转速指令(D)PLSY格式如图6所示。

图6 恒转速指令(D)PLSY格式
指令(D)PLSY控制PLC从Y0输出[S1·]指定的脉冲频率和[S2·]指定数量的脉冲,当[S2·]为0时,连续输出脉冲。使用16位指令PLSY和32位指令DPLSY时,[S1·]和[S2·]允许设置的最大值各有不同。在脂润滑试验中,因为润滑脂有剪切变稀特性,可以通过设置[S2·]参数精确控制润滑脂的剪切时间,从而保证每次测量结果的一致性。
变速指令(D)PLSR格式如图7所示。

图7 变速指令(D)PLSR格式
指令(D)PLSR控制PLC从Y0输出的脉冲频率按[S1·]指定的最高频率分10级减速,达到[S2·]指定的输出脉冲数后分10级减速。使用16位指令PLSR和32位指令DPLSR时,最大值各有不同。[S3·]设定加减速时间,最大值为5 000 ms。一般为了在标定干涉级次时获取足够多的数据,可将[S3·]设置为最大值,但是它还需满足下列公式
(11)
目标速度较低时[S3·]一般可以设置为5 000,但当目标速度较高时,加减速时间可能会少于5 000 ms。为了精确控制电机的角位移以及润滑脂的剪切时间,需根据变速指令的加减速过程,精确设置指令的脉冲数[S2·]。变速指令的加速过程如图8所示[17]。
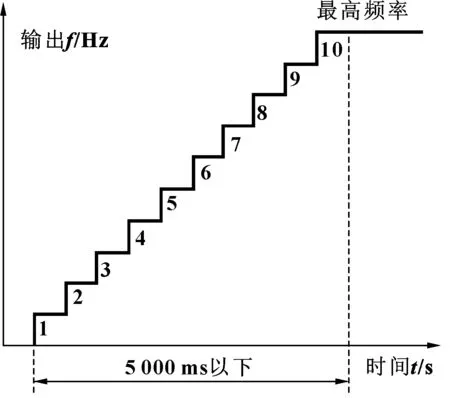
图8 变速指令(D)PLSR的加速过程
加减速过程一次变速量是[S1·]的1/10,变速过程一共分为10个阶梯,每一个阶梯的编号为n,因此第n个阶梯上的脉冲数Pn的计算方法如下:
(12)
根据上式,最高转速对应的脉冲数、圈数、运行时间以及加减速过程转过的角度、整个动作时间等都可以精确计算出来。
5 试验结果与分析
将设计好的程序下载到PLC试运行,摩擦副稳定运行,试验中玻璃盘运行情况与计算结果一致,并且记录到清晰光干涉图像。图9所示为某锂基润滑脂在3 N负载、不同速度下试验得到光干涉图像。
从图9中可见,在中低转速下,润滑膜的光干涉图像呈现出明显的马蹄形特征,即弹流润滑的典型特征。根据以上测量原理,经干涉级次的标定及计算后,绘出润滑脂横截面处膜厚分布曲线如图10所示。随着速度的增加,润滑膜平均厚度增加,并且在右侧的润滑剂出口处的颈缩会逐渐往接触中心移动,摩擦副润滑状态可能会进入流体动力润滑状态,马蹄形特征消失,这与光干涉图像变化情况一致。通过试验对比发现,充分润滑的情况下脂润滑的平均膜厚比油润滑时大,与前人的研究结果也是一致的[7,18],不过由于润滑脂的弹流润滑理论目前还缺乏通用的流变模型和计算方法[10],计算值与试验值的定量比较还需要进一步研究。
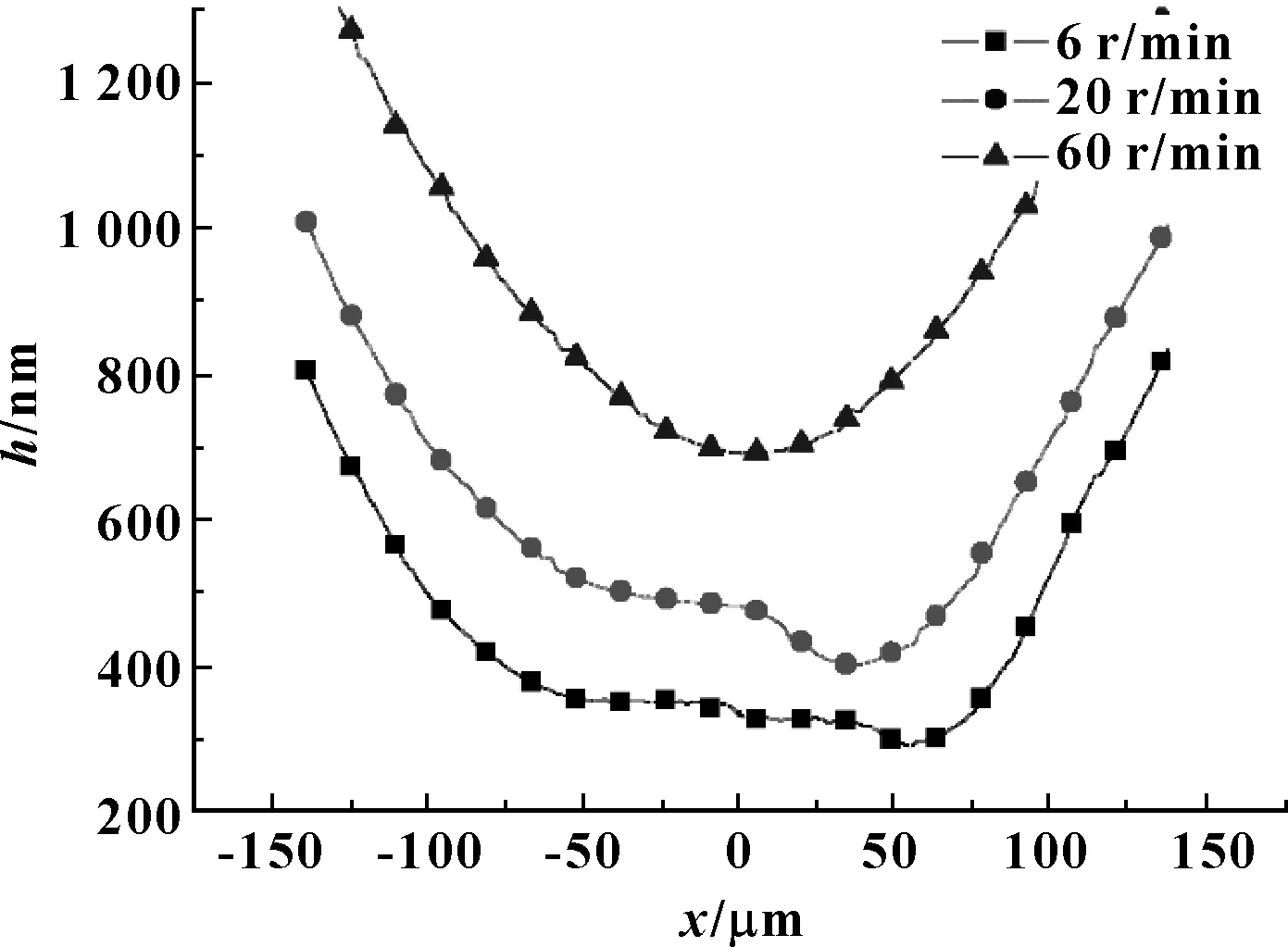
图10 润滑脂横截面处的膜厚分布
6 结论
(1)设计一种球盘接触脂润滑试验台的主轴结构,具有较高的旋转精度,能保证脂润滑试验台的运动控制精度要求。
(2)根据试验台运动控制的目的,设计其运动控制的硬件构成和软件程序,实现了试验台预期的控制功能。
(3)采用该脂润滑试验台对某锂基润滑脂进行膜厚测试,结果表明,该试验台能较清晰稳定地观测到光干涉图像,取得了合理的测量结果。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
石油商技(2021年4期)2021-09-09
装备制造技术(2020年11期)2021-01-26
微特电机(2020年11期)2020-12-30
造船技术(2019年6期)2020-01-01
石油商技(2019年4期)2019-08-31
制造技术与机床(2019年6期)2019-06-25
制造技术与机床(2018年12期)2018-12-23
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26