
51单片机的智能小车控制系统中的应用研究
2021-04-18 00:43:03索健章陈宇豪黄文莱陈志伟尹昭恒
科技研究·理论版 2021年18期
索健章 陈宇豪 黄文莱 陈志伟 尹昭恒
摘要:自单片机问世以来,已广泛应用于各个行业。当今社会,几乎所有的电子产品都会使用单片机的集成芯片。51单片机是一款八位单片机,其易用性和通用性受到了广泛用户的好评。基于其体积小、功耗低、成本低,工作可靠性强。根据这些特点,特别适合控制相关系统。本设计采用STC89C52RC微控制器作为车身的主要核心控制芯片。操作说明的无线传输。光电门用于监控小车驱动轮的转速。从而用PWM动态调节和控制小车的速度和方向。本设计主要实现了以下功能:前进后退、左转右转、黑线追踪、避障、红外遥控、车速调节。
关键字:51单片机;智能小车 ;可管理;STC89C52RC
一、引言
51单片机是对所有兼容Intel8031指令系統的单片机的统称。该系列单片机的始祖是Intel的8004单片机,后来随着Flash rom技术的发展,8004 单片机取得了长足的进展,成为应用最广泛的8位单片机之一,其代表型号是ATMEL公司的AT89系列,它广泛应用于工业测控系统之中。很多公司都有51系列的兼容机型推出,今后很长的一段时间内将占有大量市场。51单片机是基础入门的一个单片机,还是应用最广泛的一种。需要注意的是51系列的单片机一般不具备自编程能力。
智能遥控小车的研究现状最早应用于美国工业,是因为它具有极大的便捷性和智能性。让它被政府认可。在相关技术和政策的支持下,各主要工业国在智能无线遥控方面都有一定的优势。因此,未来智能汽车的应用将无处不在。在这种设计中,智能汽车由两个轮子驱动。C52RC芯片是控制的核心部分,而DC电机主要是L298N集成电路。借助单片机产生的脉宽调制信号,控制电机转速,进而调节转速。实现了红外避障。在此基础上,连接红外控制。单片机解码后,自动选择汽车功能。这种设计结构被简化了。相对容易实现。但它高度智能化和人性化。某种程度上体现了智能属性。
二、系统总体结构及原理
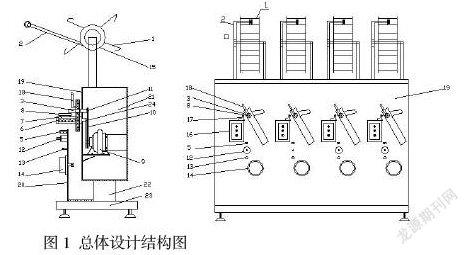
本设计是一款基于单片机的智能小车。整个小车系统主要由硬件系统和软件系统两部分组成。无线遥控小车的整体结构图如图1所示。本设计系统主要集中在以STC89C52RC为核心的单片机上。利用T0定时器的中断方式,形成更精确的脉冲波,驱动发动机L298N芯片,精确控制发动机转速。PT2262的编解码芯片用于无线传输和操作:车身移动平台上的单片机接收到相应的命令后,控制命令改变发动机的PWM脉冲波形。并调整车辆的当前运行状态。
三、硬件设计
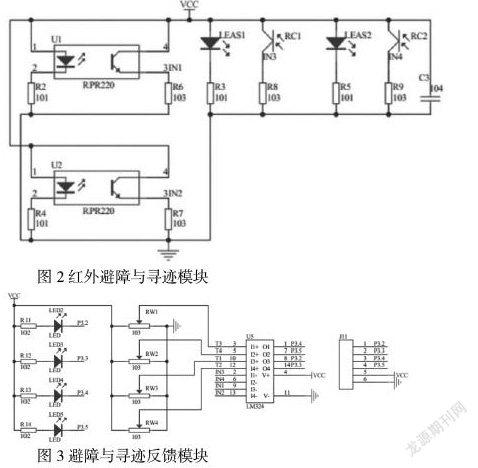
在小车设计的硬件模块中单片机采用的是51系列作为控制的核心处理器。这里主要是以STC89C52RC作为主要控制芯片,它兼容51的全部功能并且功能更加优化。单片机最小系统由外围信号I/0口组成的,包括电源、CPU时序电路、复位电路。在这三个模块的基础.上,单片机就能够正常的工作。设计系统中,时钟晶振电路模块采用的工作方式是内部时钟的工作方式,是通过利用芯片内部的实时震荡谐振电路模块来进行实现。本设计的主要核心硬件模块是红外避障和寻迹功能模块。红外避障模块与红外寻迹模块分别如图2、3所示。将第一个RPR0/IN1与M34中的第九个引脚相连接起来,红外发光二极管分别接P3.2. P3.3.P3.4和P3.5引脚,通过比较LM34芯片,我们知道可以通过接受管电压与设置的参考电压值进行比较,之后得到显影电平的输出。小车跳转到寻迹模式后。对应的单片机就开始进行工作。进行不停的对I/O口进行扫描。直到检测到某一个I/O有信号输出时,首先要做出判断是哪一个探测器对黑线进行的探测以及得到的结果,若是左边的探测器探测到.的信号。对应的也就是左边的车身把白线压到了。那么此时就要对.小车做出右转的命令使其右转:同样的道理。如果是右边的探测器探测到的信号,也就意味着小车右边压上了黑线。此时小车就应该向左偏离运行轨迹,做出靠左的反应。经过这样的调整过后。小车.是还要进行前行的动作。小车不断循环往复地重复以上动作。从而达到在方向上对小车进行控制。
四、总结
本设计以单片机为控制核心,结合寻迹电路、无线遥控电路、电机驱动电路和红外避障电路实现小车的行驶,自动循迹,避障,红外遥控,车速调节等功能。基本完成各项指标,实现小车的智能化行驶。系统是通过软硬结合的方式,得到硬件检测信号后输入单片机各个对应的I/0接口,通过汇编程序控制过程,小车由遥控启动后,自动寻迹,并不断检测遥控、避障和语音信号,只要得到其中任何种信号都将转入它们对应的功能模块,实现有效控制。此次设计的知识面比较广范,能把我们所学的知识都联系起来,也是一次理论联系实际的训练,能够使我们的知识掌握更牢,并能提升我们分析问题,解决问题的能力。
参考文献:
[1]刘雪飞.李万敏.基于51单片机的智能小车控制系统设计与制作[J].2020
[2]张鑫.单片机原理及应用(第4版)
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
环球时报(2022-05-23)2022-05-23 11:28:37
金桥(2021年4期)2021-05-21 08:19:20
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
电子制作(2019年7期)2019-04-25 13:17:14
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
文苑(2018年22期)2018-11-19 02:54:18
电子制作(2018年8期)2018-06-26 06:43:02
光学精密工程(2016年3期)2016-11-07 09:03:43
