基于压力传感器的人体坐姿识别测试研究
2021-04-17 05:53:30孙明扬孟彩茹
电子科技 2021年4期
孙明扬,孟彩茹
(河北工程大学 机械与装备工程学院,河北 邯郸 056038)
青少年长时间采用不正确的坐姿进行工作和学习会增加驼背、脊柱侧弯的发病几率[1]。长时间保持不正确的坐姿会给脊柱带来严重的伤害,进而导致颈肩部、四肢和腰部的肌肉的损伤,最终使青少年患上工作相关肌肉骨骼疾患(Work-related Musculoskeletal Disorders,WMSDs)的疾病[2-4]。为了预防此类问题的发生,坐姿监测机器人等智能设备成为青少年矫正不正确坐姿,并养成良好坐姿习惯的重要辅助设备。目前,对于坐姿的识别方法主要有:基于阵列压力传感器的坐姿识别[5-6]、基于视觉识别的坐姿识别[7-8]以及基于特殊传感器的坐姿识别[9-10]。基于阵列压力传感器的坐姿识别通过位于座底的阵列传感器感知臀部的压力分布变化来识别坐姿,对于坐姿改变幅度较小的监测效果不明显。基于视觉识别的坐姿识别方法对所处环境的光照强度要求高。光线强弱都会对监测效果产生影响,且所需的视觉传感设备成本较高。加速度传感器、角度传感器和光芯传感器等特殊传感器虽可用做坐姿识别的装置,但此类传感器具有一定的专业性,并不适用于坐姿监测,且传感器的调试过程比较繁琐,对所处的环境要求较高。针对以上问题,本文设计了一种基于压力传感器来监测人体上半身相应位置的变化并进行坐姿识别的方法。该方法通过监测不同坐姿人体上半身位置改变明显的几个位置实现机器人对人体坐姿信息的识别,为坐姿监测机器人实现坐姿识别提供一种新的监测方法。
1 坐姿情况分析
对于标准坐姿的定义为:眼睛与书本距离应为一尺,胸前与课桌距离应为一拳,握笔的手指与笔尖距离应为一寸,读写连续用眼时间不宜超过40 min[11]。常见的不正确坐姿主要分为:前倾坐姿、后仰坐姿、左倾坐姿和右倾坐姿4种,如图1所示。

(a) (b) (c) (d)
如图1(a)所示,在前倾坐姿下身体重心向前,前胸处向前倾斜,背部的脊椎则向后偏移。其中,胸椎下部和腰椎两处偏移最明显。如图1(b)所示,在后仰坐姿下,身体重心向后,身体的整个背部整体向后偏移。其中,后背部的两侧肩胛骨处、胸椎下部和腰椎共计4处为最明显的偏移点。如图1(c)和图1(d)所示,在左倾和右倾坐姿下,其重心分别向左或向右偏移。在左倾坐姿下,除了胸椎下部和腰椎两处向后偏移外,右肩膀明显高于左肩膀,左后肩胛骨位置同时向后移动。而右倾坐姿的情况则与左倾坐姿完全相反。
综上所述,设置8个监测点作为坐姿识别的依据。这8个点分布位置为:左前胸点(A)、右前胸点(B)、左后背点(C)、右后背点(D)、胸椎点(E)、腰椎点(F)、左肩点(G)和右肩点(H)。表1统计了作为4种坐姿进行识别的监测点。
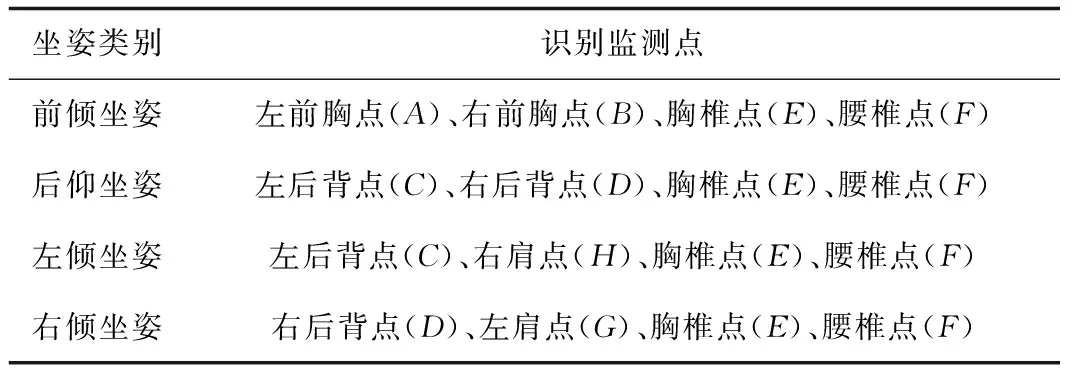
表1 坐姿识别监测点统计表
2 主要构件的设计
2.1 支架尺寸参数的确定
为验证上文所选方法能够对不同坐姿进行识别,需要根据8处监测位置的分布针对进行坐姿监测机器人的硬件设备进行结构尺寸的设计。不同年龄、不同种族、不同性别之间的人群在人体相关的尺寸参数上具有明显的差异性,因此首先需要对其进行人机工程学的理论分析,并对尺寸参数的选择进行分析。虽然不同人群在人体尺寸参数方面具有一定的差异性,但在统计学上具有一定的规律:群体人体尺寸近似服从正态分布、各部分尺寸间的相关性和人体尺寸比例关系的差异性3种统计特性[12-13]。
由文献[12]中的参数信息,分别求出机器人监测支架部分尺寸参数。机器人监测支架的总高度为
H=909±50 mm
(1)
机器人监测支架的肩部监测宽度为
W=375±50 mm
(2)
机器人双肩监测点与监测支架的主支架的距离为
H1=212÷2=106 mm
(3)
后背监测点到椅子座板的距离
H3=550±50 mm
(4)
前胸监测点到桌面的距离
H4=350±50 mm
(5)
2.2 机器人监测支架的设计
根据上文所求出的基本参数为依据,以构型演绎法[14]为理论基础,利用Solidworks三维建模软件进行三维建模,如图2所示[15]。支架主要由1个大监测支架和两个小监测支架组成。大监测支架需放置在座椅上,小监测支架固定在书桌上。当实验对象以标准坐姿坐在大支架底座上时,传感器不会被激活。若以其他4种不正确坐姿落座时,对应监测位置的传感器则会被激活,则机器人能接收到被激活传感器信号发出的压力信号,从而达到对坐姿识别的目的。
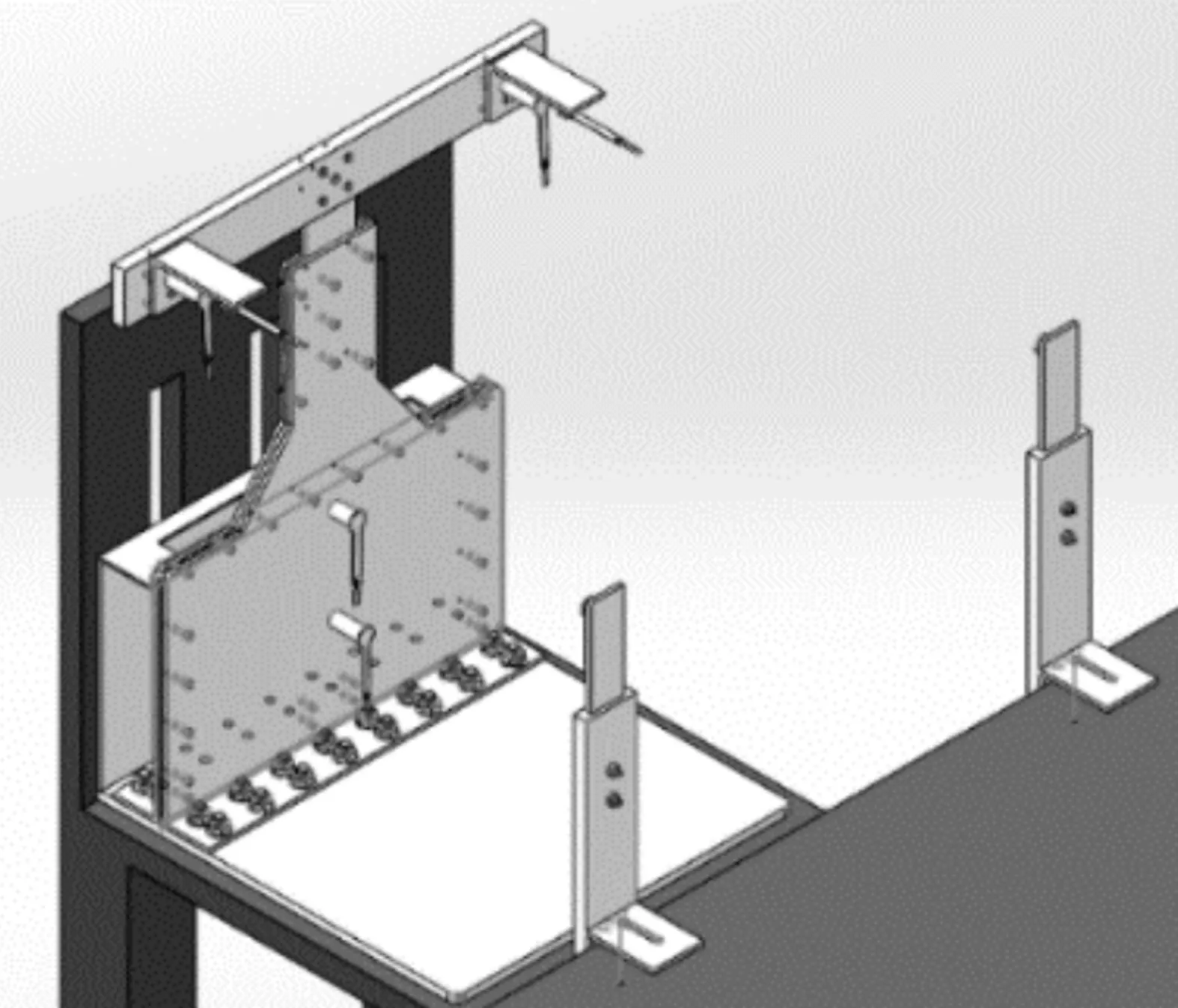
图2 机器人监测支架三维示意图
2.3 机器人坐姿识别装置的设计
机器人坐姿识别装置主要功能是将压力传感器收集到的信号发送至单片机。单片机是根据信号控制LED的亮灭,提醒实验人员坐姿变化的一种可视化装置。如图3所示,坐姿识别装置主要由压力传感器、Arduino单片机、1 kΩ电阻和LED组成。实现识别装置的监测功能,需要单片机进行程序的编译、烧录和测试工作[16-17]。
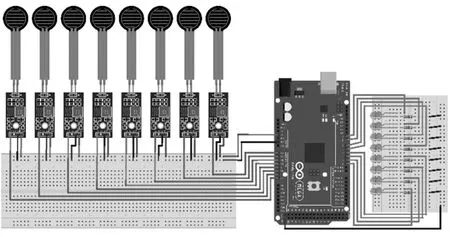
图3 机器人坐姿识别装置示意图
当实验人员坐姿发生改变时,对应监测位置的传感器被激活,此时LED处于高电位,坐姿识别装置工作流程如图4所示。
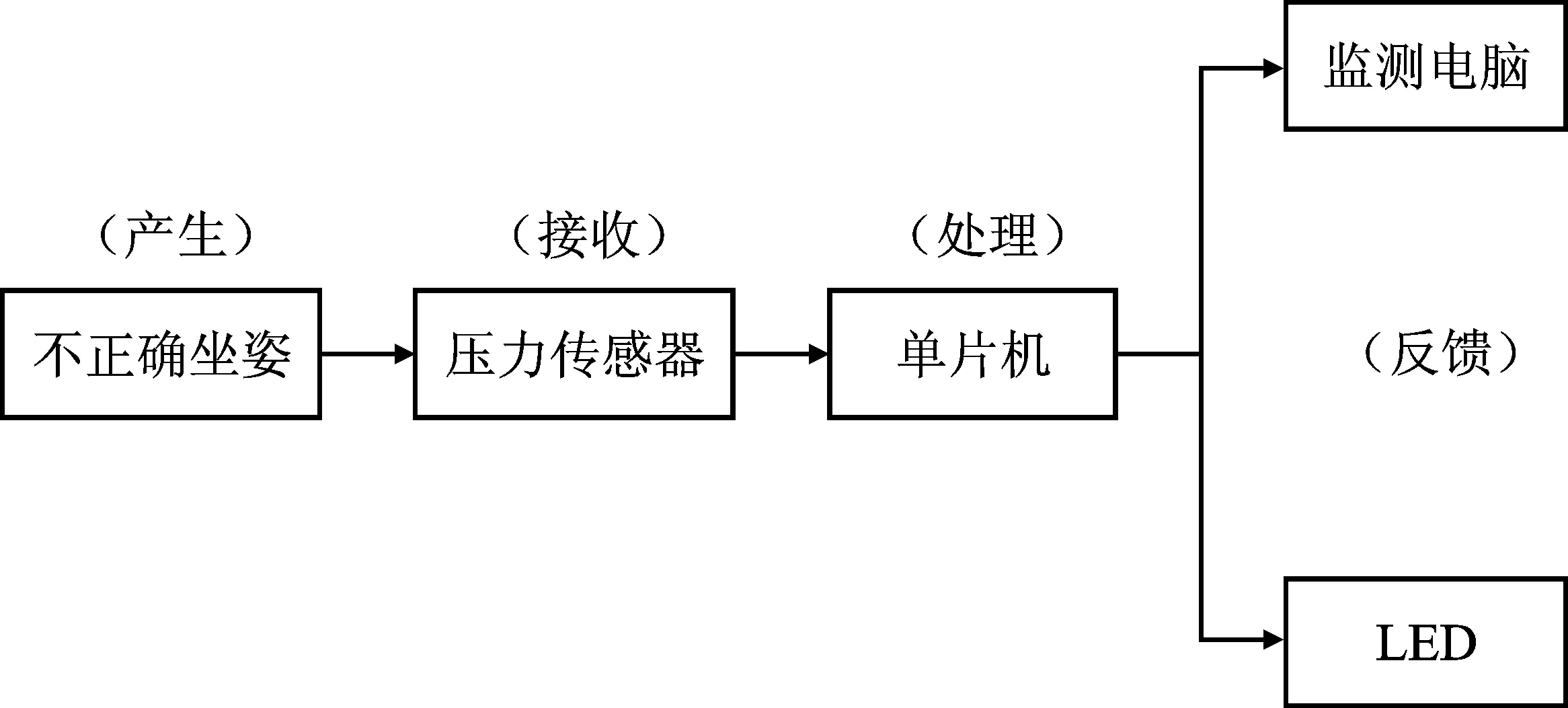
图4 机器人坐姿识别装置工作流程图
3 坐姿识别的验证实验
3.1 实验人员的样本选择
为了验证坐姿信息识别方法的可行性,选取身高在175~185 cm,体重在75~100 kg之间的男性实验对象10人。为了使实验严谨,选实验人员身高分为175 cm、178 cm、180 cm、183 cm和185 cm五个档,每个档位选择体重不同的实验人员两名,用来验证相同身高下坐姿识别的差异性。
3.2 实验数据采集与分析
将根据三维软件设计的机器人监测支架加工成实体样机,如图5所示。先将坐姿识别监测装置与电脑相连,再进行一些必要的调试。当监测机器人各部分功能调试无误后,准备进行坐姿识别验证实验。

图5 调试完成的坐姿识别装置实物图
首先,实验人员以标准坐姿坐在装置上,根据其身高情况进行细微调整,待前期调整完毕后,实验人员分别进行“前倾坐姿”、“后仰坐姿”、“左倾坐姿”和“右倾坐姿”4种坐姿。随后,验证每种坐姿下,对应的压力传感器是否被激活,并记录当前坐姿下激活的传感器压力值。实验结果如表2~表5所示。
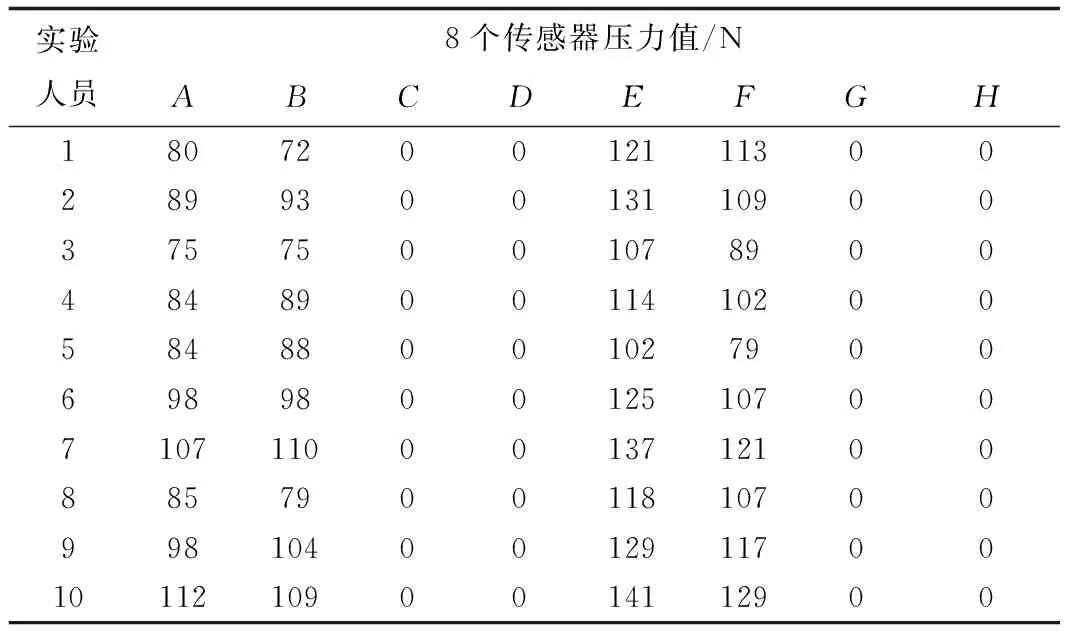
表2 前倾坐姿和感器压力值
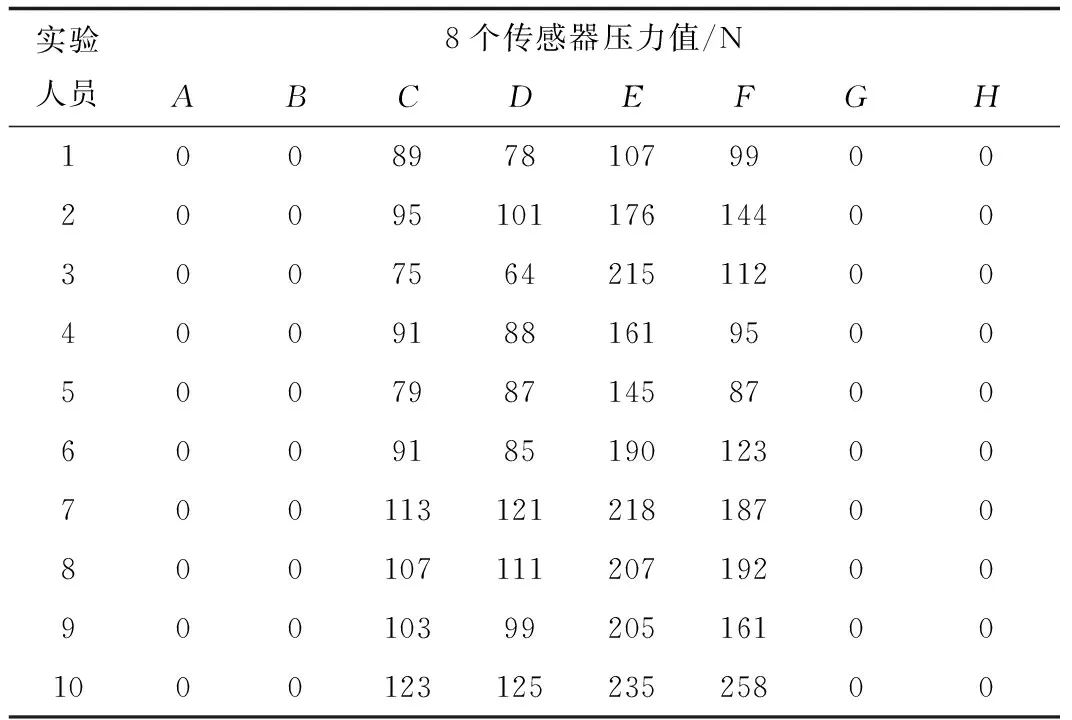
表3 后仰坐姿感器压力值
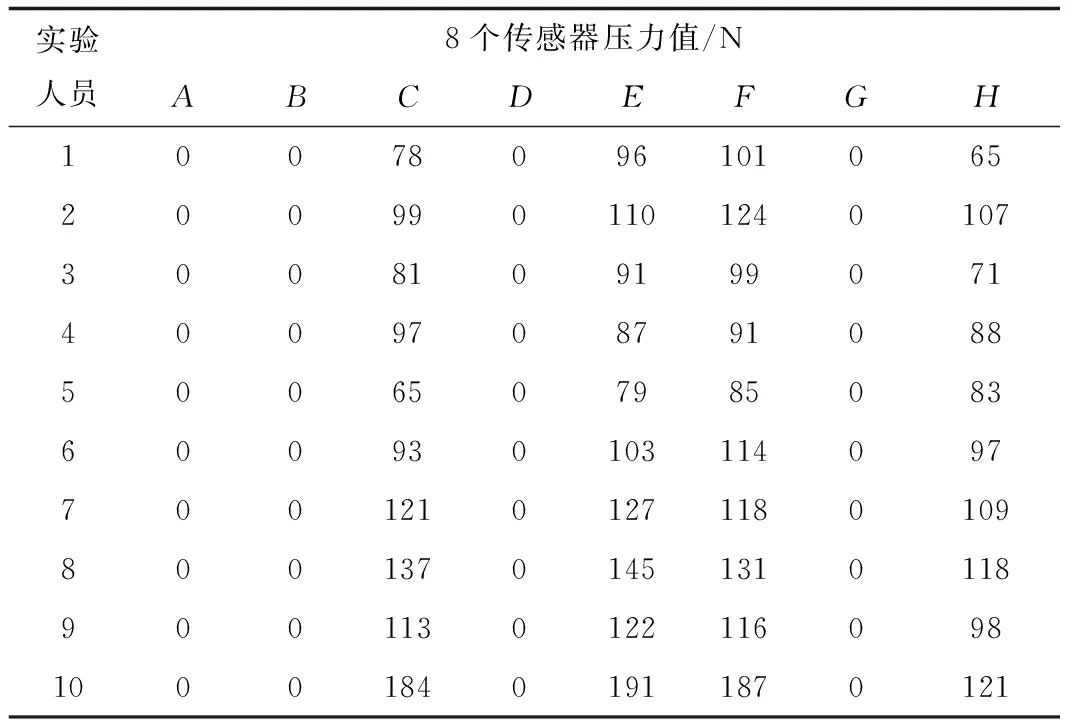
表4 左倾坐姿传感器压力值
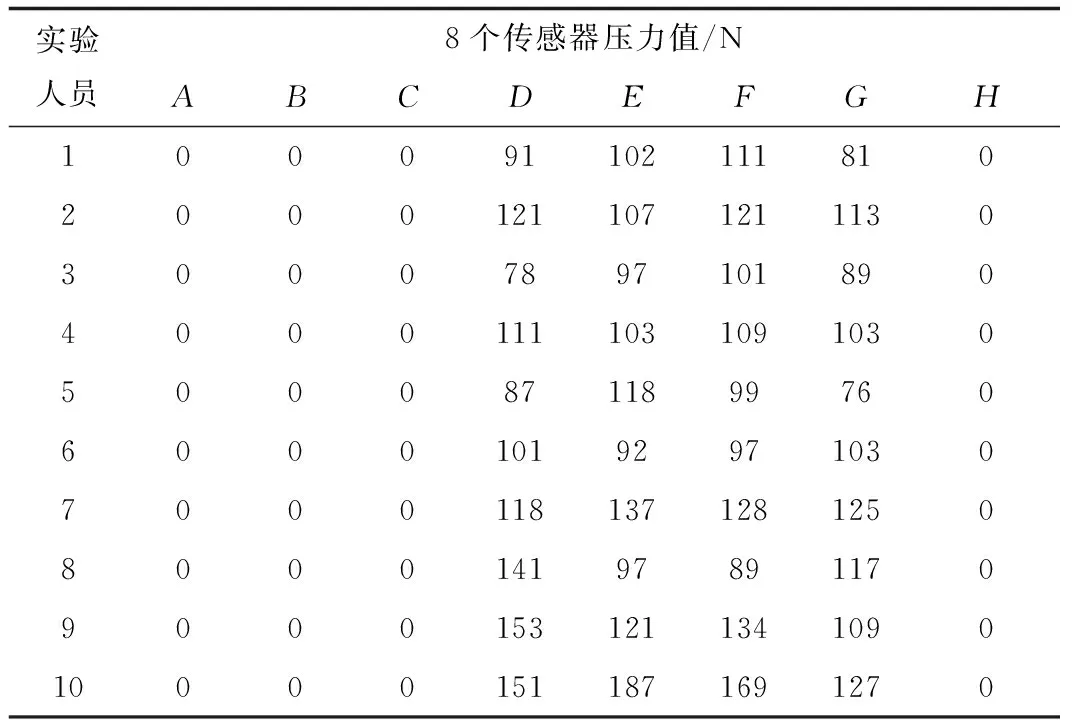
表5 右倾坐姿传感器压力值
通过对以上数据分析可知:(1)10名实验人员按要求以4种不正确坐姿坐在监测支架上时,坐姿识别装置的压力传感器均能按设计的要求被激活,并且在电脑上具有压力值显示。表明基于压力传感器对人体上半身的坐姿识别方法对于坐姿识别的效果明显;(2)在相同身高的两个实验对象中,体重大的实验对象在4种坐姿中,压力传感器接收到的压力值越大,即在身高相同的条件下,压力值大小与体重的大小成正相关;(3)通过对4种坐姿下各监测点压力值的大小进行比较后发现,位于“胸椎”和“腰椎”处的两个监测点的压力值明显大于其他监测位置的压力值。其中,在“后仰坐姿”下,两处的压力值最大,表明在处于不正确的坐姿中,对人体脊椎伤害最大,应进行针对性的预防,减轻对身体的伤害。
4 结束语
本文提出了提出一种基于压力传感器的坐姿识别方法,提高了对4种坐姿的识别率。测试实验的结果证明了此方法能够实现对4种不正确坐姿的识别,能使相应的坐姿监测设备正常工作。此方法在针对人体上半身变化的相关研究或相关的坐姿监测设备中具有一定的应用潜力。
猜你喜欢
煤气与热力(2022年4期)2022-05-23 12:44:56
小哥白尼(趣味科学)(2022年1期)2022-04-26 14:21:08
水利水电科技进展(2021年6期)2022-01-07 02:58:02
大科技·百科新说(2021年10期)2021-12-31 07:24:02
基层中医药(2021年5期)2021-07-31 07:58:34
小天使·一年级语数英综合(2020年9期)2020-12-16 02:57:03
水电站设计(2020年4期)2020-07-16 08:23:48
电子制作(2019年10期)2019-06-17 11:44:54
电子制作(2018年19期)2018-11-14 02:36:50
特别健康(2018年3期)2018-07-04 00:40:10