三种经典夜间陆地雾遥感反演方法的适用性对比分析
2021-04-16 03:19赵诗童时晓曚吴晓京杨超张苏平衣立
海洋气象学报 2021年1期
赵诗童,时晓曚,吴晓京,杨超,张苏平,衣立
(1.中国海洋大学物理海洋教育部重点实验室,山东 青岛 266100; 2.青岛市气象台,山东 青岛 266003; 3.国家卫星气象中心,北京 100081; 4.国家气象中心,北京 100081)
引言
雾是近地面空气中的水汽凝结成大量悬浮在空气中的微小液滴或冰晶,导致水平能见度低于1 km的天气现象[1]。我国陆地雾通常发生在夜间或凌晨[2],由于雾天的能见度很低,夜间雾极易引发交通阻塞和汽车追尾事故,严重影响交通运输等人类生产、生活活动。夜间雾的监测和预报能够有效减少其造成的损失。受地面站点密度和观测时间的限制,常规监测手段无法实现对夜间雾的时空连续性观测,而卫星遥感具有覆盖面积广、信息量多等优点,是一种其他常规观测方式无法替代的大尺度观测方式[3]。基于卫星遥感数据对夜间雾进行研究,有助于加强对夜间雾的监测。
夜间雾区在红外通道有较独特的光谱特征。雾或低层云在中红外通道的比辐射率显著低于其在热红外通道的比辐射率[4],利用这一原理可以实现对夜间雾和低层云的识别。国外对于夜间雾遥感反演方法的研究较早。EYRE et al.[5]在HUNT[4]的研究基础上提出了利用双通道差值法反演夜间雾区。ELLROD[6]将该方法应用于GOES卫星数据资料来探测夜间雾。许多研究者采用双通道差值法来进行雾的反演[7-9]。ELLROD and GULTEPE[10]发现地表温度减去云顶温度(GOES卫星10.7 μm通道亮温)得到的差值与云底高度之间有良好的相关性。为了弥补双通道差值法的不足,研究者利用地表温度和雾顶亮温的差值来区分雾和低层云[8,11]。近年来,我国夜间雾的遥感监测方法不断发展。GAO et al.[12]利用MTSAT卫星的IR1和IR4通道数据对黄海夜间海雾进行识别。吴晓京等[13]在双通道差值法的基础上,利用动态阈值方法改进了风云二号卫星海雾检测技术。张春桂等[14]在分析福建沿海海雾的时空变化特征基础上,建立了福建沿海夜间海雾监测模型。何月等[15]在对浙江及其周边地区的雾识别研究中提出了归一化大雾指数。张春桂和林炳青[16]将中红外和热红外通道归一化差值指标的方法应用于台湾海峡夜间海雾的自动识别。利用双通道差值法和3.9 μm伪比辐射率法,王宏斌等[17]使用葵花8号(Himawari-8)新一代静止气象卫星数据,研究中国地区夜间不同等级雾的识别。
利用雾的光谱特性进行夜间雾识别的方法较多,主要为三类经典夜间雾遥感反演方法:双通道差值法[5](dual channel difference,DCD)、温度差值法(difference of surface temperature and 10.4 μm channel brightness temperature,DT)以及归一化大雾指数法(normalized fog index,NDFI)。本研究利用Himawari-8静止气象卫星数据、全国地面观测资料等数据,对三类不同夜间雾遥感反演方法的适用性进行了比较和评估。
1 数据与方法介绍
1.1 葵花8号静止气象卫星数据
日本新一代静止气象卫星Himawari-8是由日本气象厅运行的地球同步气象卫星,其上搭载的先进可视红外成像仪(advanced Himawari imager, AHI)具有16个观测波段(表1),每隔10 min提供一次全圆盘数据。本文用到2016年1月—2018年12月夜间中红外波段(3.9 μm)和热红外波段(10.4 μm)的2 km分辨率亮温数据(数据来自JAXA EORC网站,ftp.ptree.jaxa.jp)。
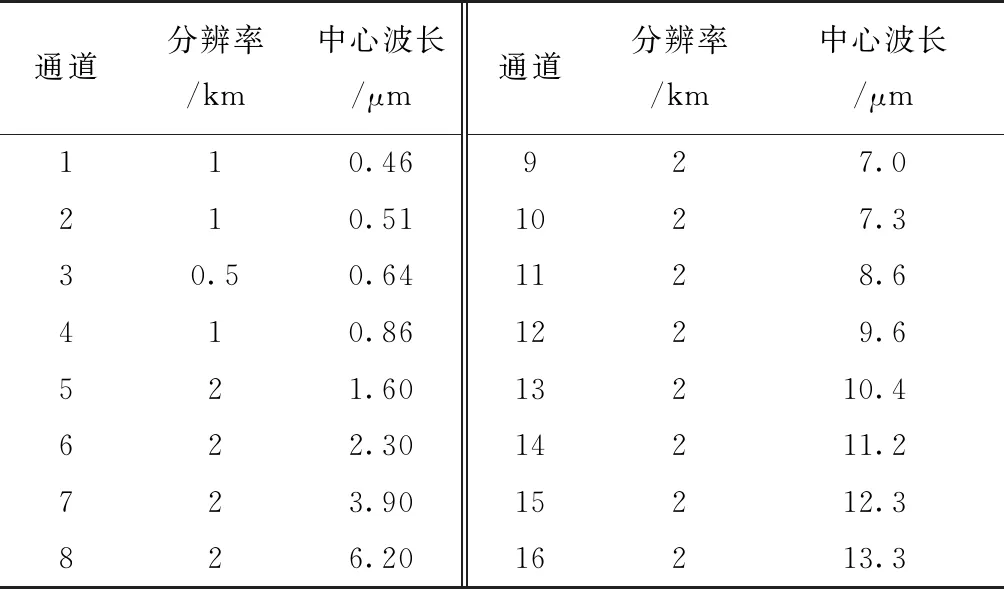
表1 AHI通道特征
1.2 地面数据
使用2016年1月—2018年12月全国2 364个自动气象站观测的1 h分辨率的站点温度和能见度等资料。若站点某一时刻及其之前一小时和之后一小时时刻的观测能见度均小于等于(大于)1 000 m,则判定该时刻为有(无)雾。2016—2018年夜间全国内陆地区各站点的有效能见度观测次数(不包括缺省观测)如图1a所示,88%的站点有效能见度观测量可以达到10 000次,站点最低能见度有效观测量为1 056次,在东部平原地区观测站点分布密度较大(图1)。
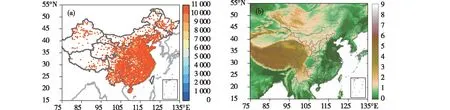
图1 2016—2018年全国内陆地区各站点能见度观测量统计分布(a;填色,单位:次)及地形高度图(b;填色表示海拔高度,单位:km)Fig.1 Spatial distribution of visibility observations (a; colored, units: times) at meteorological stations in inland areas of China from 2016 to 2018 and topographic map (b; colored area for altitude, units: km)
1.3 遥感反演方法
1.3.1 双通道差值法
研究[12]表明,低云和雾通过卫星中红外通道的发射率在夜间要显著低于长波红外通道。采用中红外通道和长波红外通道相结合的方法(即利用两通道的亮温差),可以在夜间实现对雾的识别。本文所使用的双通道差值法是将Himawari-8卫星中红外波段(3.9 μm)和热红外波段(10.4 μm)作差值,得到亮温差(ΔTB3.9~10.4),即:
ΔTB3.9~10.4=TB3.9-TB10.4
(1)
式中:TB3.9,TB10.4分别为3.9 μm和10.4 μm通道的亮温。
LEE et al.[7]给出了短波通道和长波通道亮温差的一些代表值及其特性。GAO et al.[12]在此工作基础上,对我国黄海海雾的双通道差值阈值进行研究。本文选择阈值区间[-5.5,-2.5]用于陆地雾的反演[12]。若中红外通道和长波红外通道两通道亮温差值(ΔTB3.9~10.4)在这一阈值区间内,则认为有雾发生,反之则认为是非雾天气。
1.3.2 温度差值法
ELLROD and GULTEPE[10]利用GOES卫星3.9 μm和10.7 μm通道亮温差识别出低层云和雾,在此基础上使用地表温度和10.7 μm通道亮温差值来推断云底较低的区域,其中包括雾。本文尝试将该方法应用于我国内陆地区夜间雾的识别上,定义地表温度(地面站点观测温度)和Himawari-8卫星10.4 μm通道亮温差为ΔT。
ΔT=Tsfc-ΔTB10.4
(2)
式中:Tsfc为地表温度,TB10.4为Himawari-8卫星10.4 μm通道亮温。
参考前人研究[10]所提出的阈值,本研究中当双通道差值ΔTB3.9~10.4≤-2 K且ΔT的绝对值|ΔT|<4 K时,则认为此处有雾发生,反之则认为是非雾天气。
1.3.3 归一化大雾指数法
何月等[15]在研究浙江省及周边海区雾的分布特征时,发现利用中红外和热红外波段的归一化计算比双通道差值法效果更佳,研究中将两者的归一化计算定义为归一化大雾指数(INDF)。
(3)
式中:TB3.9,TB10.4分别为3.9 μm和10.4 μm通道的亮温。
本研究采用夜间雾检测阈值[-2,-0.18][15],若归一化大雾指数值(INDF)在此阈值范围内,则认为有雾发生,反之则认为是非雾天气。
1.4 评估方法
对比卫星反演结果和站点实际观测结果,形成4种统计结果,分别定义为A、B、C、D。A代表卫星识别有雾且与站点观测结果一致的情况,B代表卫星识别有雾但与站点观测结果不一致的情况,C代表卫星识别无雾但与站点观测结果不一致的情况,D代表卫星识别无雾且与站点观测结果一致的情况。上述4个值的定义标准如表2所示。以A为例,对于卫星反演结果,利用站点经纬度获得该站点在卫星数据中的位置(格点行列数),以该时刻该格点3.9 μm和10.4 μm通道的亮温值作为站点相关亮温值,若算法计算结果在阈值内,则判定卫星反演结果为有雾;对于站点观测结果,若站点该时刻及其之前一小时和之后一小时时刻的观测能见度均小于等于1 000 m,则判定该时刻为有雾。当卫星反演和地面观测均满足为有雾的条件时,则算作一个A。
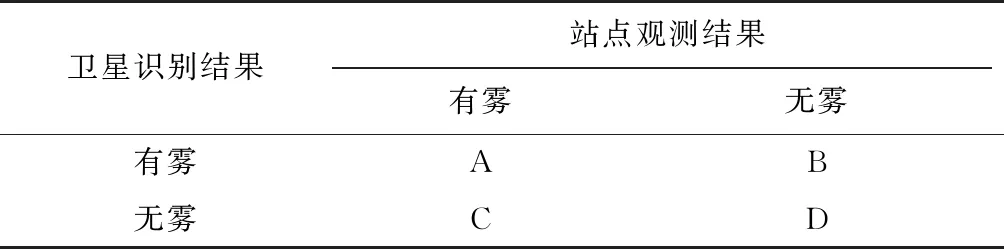
表2 卫星反演结果分类标准
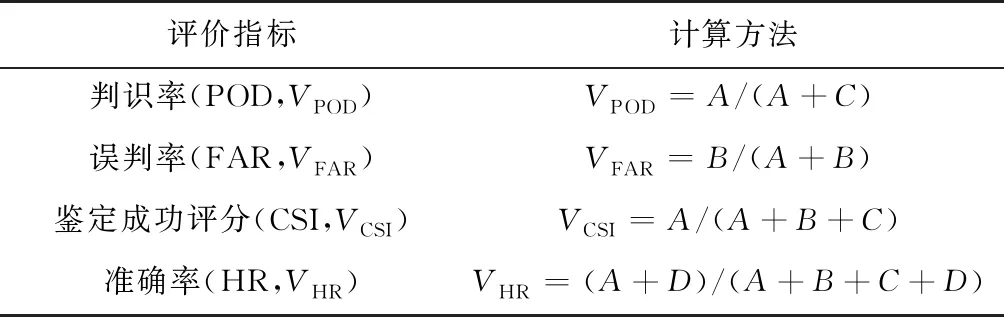
表3 评价指标计算方法
本文使用BENDIX et al.[3]用于评价雾检测结果的鉴定成功评分(critical success index, CSI)、判识率(probability of detection, POD)、误判率(false alarm ratio, FAR)和准确率(hit rate, HR)指标,从时间变化和空间分布两方面对夜间陆地雾遥感反演方法的适用性进行分析,其计算方法如表3所示。
在进行指标参数计算时,均先将研究时间范围内的所有观测结果和卫星反演结果按照表2所示的标准进行分类统计,得到A、B、C、D的总数,而后根据表3公式进行鉴定成功评分、准确率、判识率及误判率的计算。
计算每个站点每个时刻的太阳高度角,当太阳高度角小于0°时认为是夜间。时间适用性的分析,是计算全国所有站点的评分,在2016—2018年共3 a的时间段上进行对比,例如:计算1月各算法的评分时,所使用的数据为2016年1月、2017年1月和2018年1月的夜间数据。空间适用性的分析,是计算每一个站点的评分,在2016—2018年共3 a的时间段上进行对比,例如:计算秋季各算法的评分时,所使用的数据为2016年9—11月、2017年9—11月和2018年9—11月的夜间数据。对个例进行分析时,对114°~124°E,32°~41°N范围内所有站点的评分进行计算,秋季个例的时间段为2016年11月3日20时—4日05时,冬季个例的时间段为2016年12月21日20时—22日05时;对温度差值算法进行误差分析时,计算115°~120°E,37°~40°N范围内所有站点的评分,在2016—2018年共3 a的时间段上进行对比,例如:计算1月算法不同阈值下的评分时,所使用的数据为2016年1月、2017年1月和2018年1月的夜间数据。具体时空范围见表4。
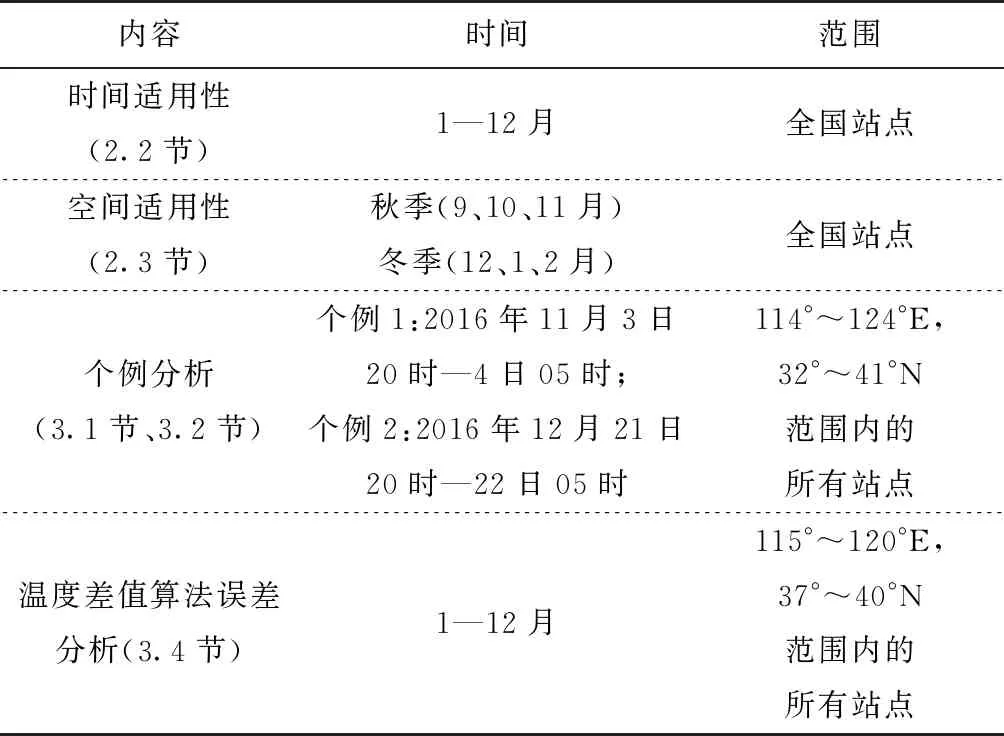
表4 各章节研究内容的相关信息
需要注意的是,本文在分析算法适用性(第2.2、2.3、3.4节)时不考虑中高云存在的情况(即站点温度与10.4 μm通道亮温差值大于15 K时认为该时次站点上空存在中高云,不纳入分类统计)。
2 结果与分析
2.1 夜间雾的季节分布特征
2016年1月—2018年12月各季节全国站点夜间陆地雾的发生频率如图2所示,夜间陆地雾在春季和夏季的发生频率较低,在秋季和冬季的发生频率较高,陆地雾频率较高的站点主要分布在华北平原和长江中下游平原。

图2 2016—2018年全国站点在各季节的夜间雾频分布(a.春季,b.夏季,c.秋季,d.冬季;填色,单位:%)Fig.2 Frequency (colored, units: %) of nighttime fog at all stations in China in spring (a), summer (b), autumn (c), and winter (d) from 2016 to 2018
当雾区上空覆盖中高云时,3.9 μm和10.4 μm通道无法准确得到云层下雾顶的辐射值,因此会导致卫星反演算法失效,无法识别出中高云下的雾区。因而,对夜间地面观测有雾时其上空卫星监测是否有中高云覆盖的情况进行了统计,结果显示,观测有雾时被判定为上空存在中高云的情况在春季、夏季、秋季和冬季的占比分别为45%、50%、34%和31%,该情况在夏季所占比例最高,秋季、冬季较低。中高云的存在会对算法反演产生影响,大大降低了反演准确率。导致中高云存在的天气系统类型较多,如锋面系统、对流性天气系统及气旋等。受冷锋或暖锋的影响,云系高层通常存在卷状云,冬季的静止锋云系也主要由高层云、高积云和层云等层状云组成[18];由于旺盛的对流会产生大量深厚的对流云系,卷云也多发生于有旺盛对流活动的地区[19];气旋涡旋边缘在高空有明显的辐散,在云区外围也会形成辐散卷云结构[18]。中高云的存在会造成算法的失效,因此当此类天气系统存在时,反演方法的准确率可能会降低。另一方面,高压系统控制下,云量少,反演算法对雾的识别效果在该情况下可能更好。
由于三种反演算法均在雾区上空存在中高云时失效,因此在对算法的适用性分析中不考虑中高云存在的情况。
2.2 时间适用性
用2016—2018年夜间所有的站点观测结果检验三种反演算法的鉴定成功评分、判识率、误判率及准确率的月平均值变化,如图3所示。结果表明,双通道差值法和归一化大雾指数法的鉴定成功评分平均值在冬季最高,温度差值法的鉴定成功评分平均值在秋季最高;双通道差值法和归一化大雾指数法的判识率月平均值随季节变化较大,温度差值法的判识率月平均值整体上比双通道差值法低,比归一化大雾指数法高,且随季节变化幅度较小;温度差值法的误判率月平均值远低于双通道差值法和归一化大雾指数法;双通道差值法的准确率月平均值与归一化大雾指数法相近,但在冬季明显低于归一化大雾指数法,温度差值法的准确率月平均值在全年均高于双通道差值法和归一化大雾指数法。三种反演算法的夜间雾反演能力在秋季和冬季相对较好。

图3 三种夜间陆地雾反演算法(DT、DCD、NDFI)的鉴定成功评分(CSI;a)、判识率(POD;b)、误判率(FAR;c)及准确率(HR;d)的月平均值变化曲线Fig.3 Variation curve of monthly mean CSI (a), POD (b), FAR (c), and HR (d) of three retrieval algorithms for nighttime land fog (DT, DCD, and NDFI)
对比三种夜间陆地雾反演算法的鉴定成功评分、判识率、误判率和准确率的各月平均值可知,在本研究区域内温度差值法的反演能力相对更好,鉴定成功评分和准确率各月平均值均高于其他两种反演算法,误判率各月平均值远低于其他两种反演算法。双通道差值法和归一化大雾指数法的鉴定成功评分、判识率和误判率的月平均值变化趋势基本相同,这是因为两种反演算法均基于雾滴的发射率在3.9 μm通道比10.4 μm通道低的理论,利用卫星两个通道间的差异来识别雾区。
2.3 空间适用性
由上文可知,我国夜间陆地雾多发于秋季和冬季,因此下文对反演算法的空间适用性讨论主要围绕秋季和冬季展开。
图4为2016—2018年三种夜间陆地雾反演算法在秋季和冬季的鉴定成功评分空间分布,三者具有显著不同。秋季双通道差值法和归一化大雾指数法在华北平原、四川盆地以及江苏省地区的鉴定成功评分高于其他地区,温度差值法在整个内陆平原地区和四川盆地的鉴定成功评分数值偏高且高于另外两种算法(图4a/c/e);冬季双通道差值法在华北平原、四川盆地的鉴定成功评分数值与秋季相比有了明显的升高,在京津冀地区有一个鉴定成功评分高值区(图4a/b);温度差值法的鉴定成功评分分布在冬季更加集中,华北平原、长江中下游平原、东北平原以及四川盆地的鉴定成功评分明显高于其他地区,京津冀地区以及四川盆地为鉴定成功评分高值区(图4d);与上述两种反演算法的变化相反,冬季归一化大雾指数法的鉴定成功评分在华北平原有所降低,仅在四川盆地相对较高(图4f)。
图4 双通道差值法(DCD;a/b)、温度差值法(DT;c/d)及归一化大雾指数法(NDFI;e/f)在秋季(a/c/e)和冬季(b/d/f)反演雾的鉴定成功评分(CSI,填色)空间分布Fig.4 Spatial distribution of CSI (colored) with DCD (a/b), DT (c/d), and NDFI (e/f) methods in fog retrieval in autumn (a/c/e) and winter (b/d/f)
三种夜间陆地雾反演算法在秋季和冬季适用于不同区域,适用区域主要集中在华北平原、长江中下游平原和四川盆地。对比可知,双通道差值法和温度差值法对夜间陆地雾的反演能力在秋季和冬季高于归一化大雾指数法,温度差值法针对四川盆地和京津冀地区的夜间陆地雾反演能力最优。此外,由图4b/d可以看到,在太行山处存在一个较为明显的鉴定成功评分高低值分界线,说明双通道差值法和温度差值法对地形敏感。
分析双通道差值法、温度差值法和归一化大雾指数法的空间适用性。图5为双通道差值法、温度差值法及归一化大雾指数法在秋季和冬季雾反演准确率的空间分布。秋季双通道差值法的准确率在四川盆地较低,冬季准确率低值区进一步向东南延伸(图5a/b);温度差值法的全国准确率数值在秋季和冬季均较高(图5c/d);秋季和冬季归一化大雾指数法的准确率也较高,但在冬季广西和广东南部附近准确率略低一些(图5e/f)。三种算法中,温度差值法和归一化大雾指数法的准确率优于双通道差值法。
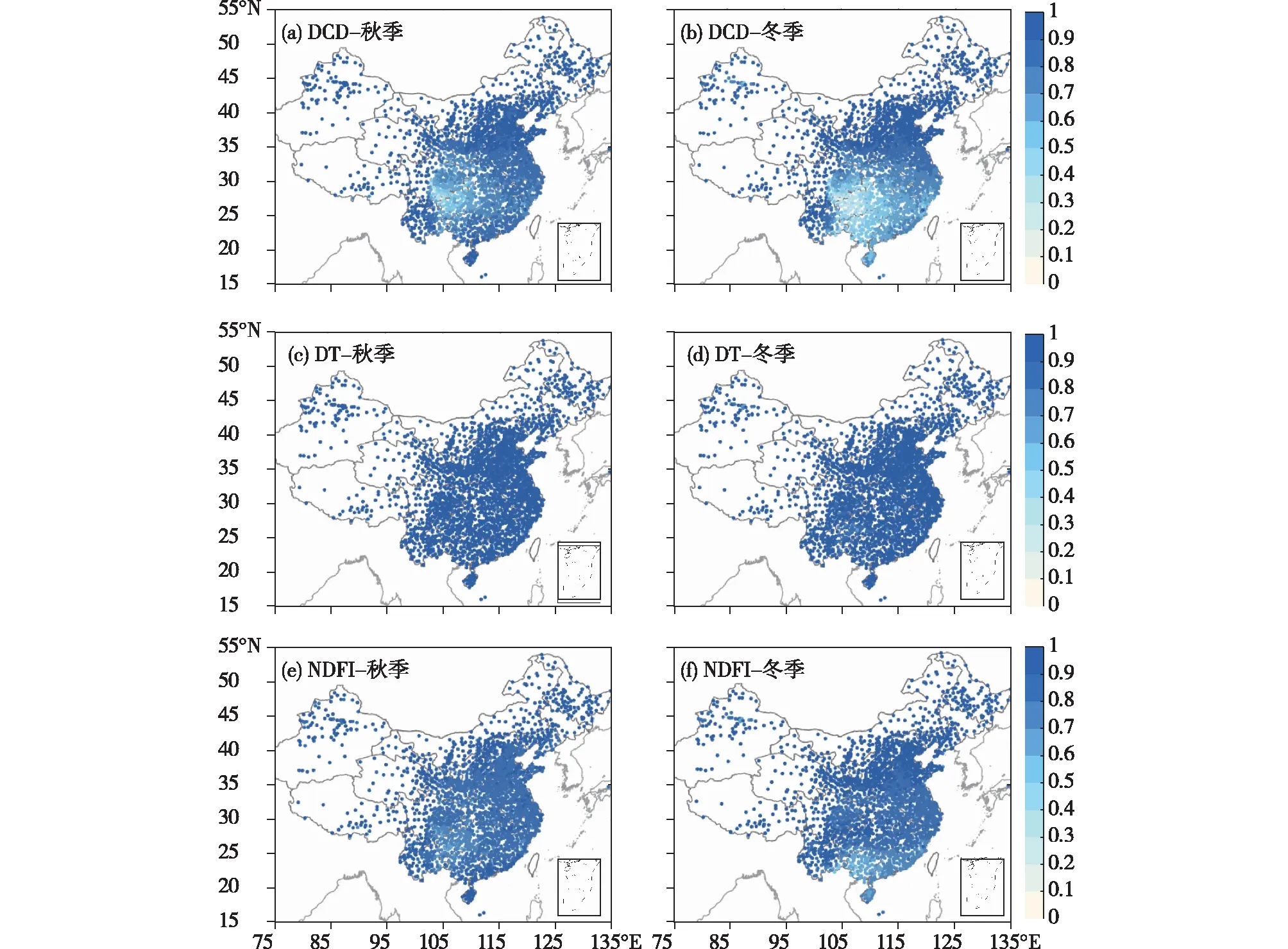
图5 双通道差值法(DCD;a/b)、温度差值法(DT;c/d)及归一化大雾指数法(NDFI;e/f)在秋季(a/c/e)和冬季(b/d/f)反演雾的准确率(HR,填色)空间分布Fig.5 The same as Fig.4, but for HR
图6为双通道差值法、温度差值法及归一化大雾指数法在秋季和冬季的雾判识率空间分布。秋季双通道差值法的判识率在长江中下游平原、云贵高原和四川盆地较高,在冬季其判识率空间分布不变,但数值更高(图6a/b)。温度差值法在秋季和冬季的判识率空间分布相似,在华北平原、长江中下游平原南部和四川盆地略高于其他地区(图6c/d)。秋季归一化大雾指数法的判识率空间分布与双通道差值法相似,冬季归一化大雾指数法的判识率整体数值很低,南部略高于其他地区(图6e/f)。三种算法的判识率空间分布具有明显的差异,双通道差值法的判识率整体更高。

图6 双通道差值法(DCD;a/b)、温度差值法(DT;c/d)及归一化大雾指数法(NDFI;e/f)在秋季(a/c/e)和冬季(b/d/f)反演雾的判识率(POD,填色)空间分布Fig.6 The same as Fig.4, but for POD
双通道差值法、温度差值法和归一化大雾指数法在秋季和冬季对雾的误判率空间分布如图7所示,三种算法的误判率低值区与其鉴定成功评分高值区(图4)对应,说明算法的误判(将非雾识别为有雾)是鉴定成功评分偏低的主要原因。双通道差值法的误判率低值主要分布在华北平原及江苏省地区。前文提到秋季和冬季双通道差值法的判识率在长江中下游平原、云贵高原和四川盆地较高,但图7a/b显示其对应区域的误判率极高。由图7c/d可知,秋季温度差值法在华北平原、长江中下游平原和四川盆地对于雾的误判率极低,冬季上述区域的误判率再次降低,且误判率低值区范围进一步扩大。而对于归一化大雾指数法,全国误判率在秋季和冬季均较高(图7e/f)。
3 个例分析
3.1 一次秋季夜间雾过程
选取2016年11月3日夜间至4日凌晨京津冀地区的一次雾过程进行分析,该过程是一次典型的夜间辐射雾过程,涵盖了雾发生、发展全过程,双通道差值法和温度差值法对本次雾过程的识别准确率均较高(误判率较低)。本次夜间雾发生在太行山以东的平原地区,受山脉的阻挡作用,雾沿山脉发展,呈带状分布(图8)。
由图8可知,3日21时已有大片站点观测到雾,双通道差值法未识别出雾区存在,而温度差值法在零星站点识别出雾;4日01时,雾逐渐向西南方向发展,两种算法在雾早期的生成区域均识别出雾的存在;4日 04时,当雾发展达到稳定后,通过两种算法反演得到的雾区与站点观测雾区分布基本吻合。
在雾生成初期,双通道差值法和温度差值法均未能识别出雾区。双通道差值法对雾的识别依赖于卫星云雾敏感波段(即中红外和热红外波段)比辐射率的变化[20],随着雾的发展,中红外通道和热红外通道的亮温差逐渐变大,直到亮温差值满足阈值条件,使得双通道差值法能够识别出雾区;而温度差值法是在双通道差值法给出的低云/雾区的基础上进行的雾区识别,因此可能导致双通道差值法和温度差值法两种算法在识别刚生成的雾区上略有滞后。
3.2 一次冬季夜间雾过程
对2016年12月21日夜间至22日凌晨华北平原地区的一次雾过程进行分析,在此次雾的发生发展过程中,其上空存在其他云类,中高云的影响导致双通道差值法和温度差值法的反演结果较差。此次雾过程覆盖了整个华北平原地区,具有范围大、影响广的特点(图9)。
由图9可知,21日21时,华北平原大部分观测站点已显示有雾,双通道差值法仅识别出南部小块雾区,温度差值法未识别出雾;22日01时,随着雾区上空的云移出,双通道差值法在无云覆盖的地区迅速识别出大片雾区,温度差值法仅在零星站点识别出雾;22日04时,双通道差值法识别出的雾区基本能够覆盖所有观测有雾站点,而温度差值法识别出的有雾站点较少。受到雾区上空云覆盖的影响,双通道差值法和温度差值法对雾的识别能力失效,两种算法在本次雾过程中的反演效果并不理想,但双通道差值法优于温度差值法。
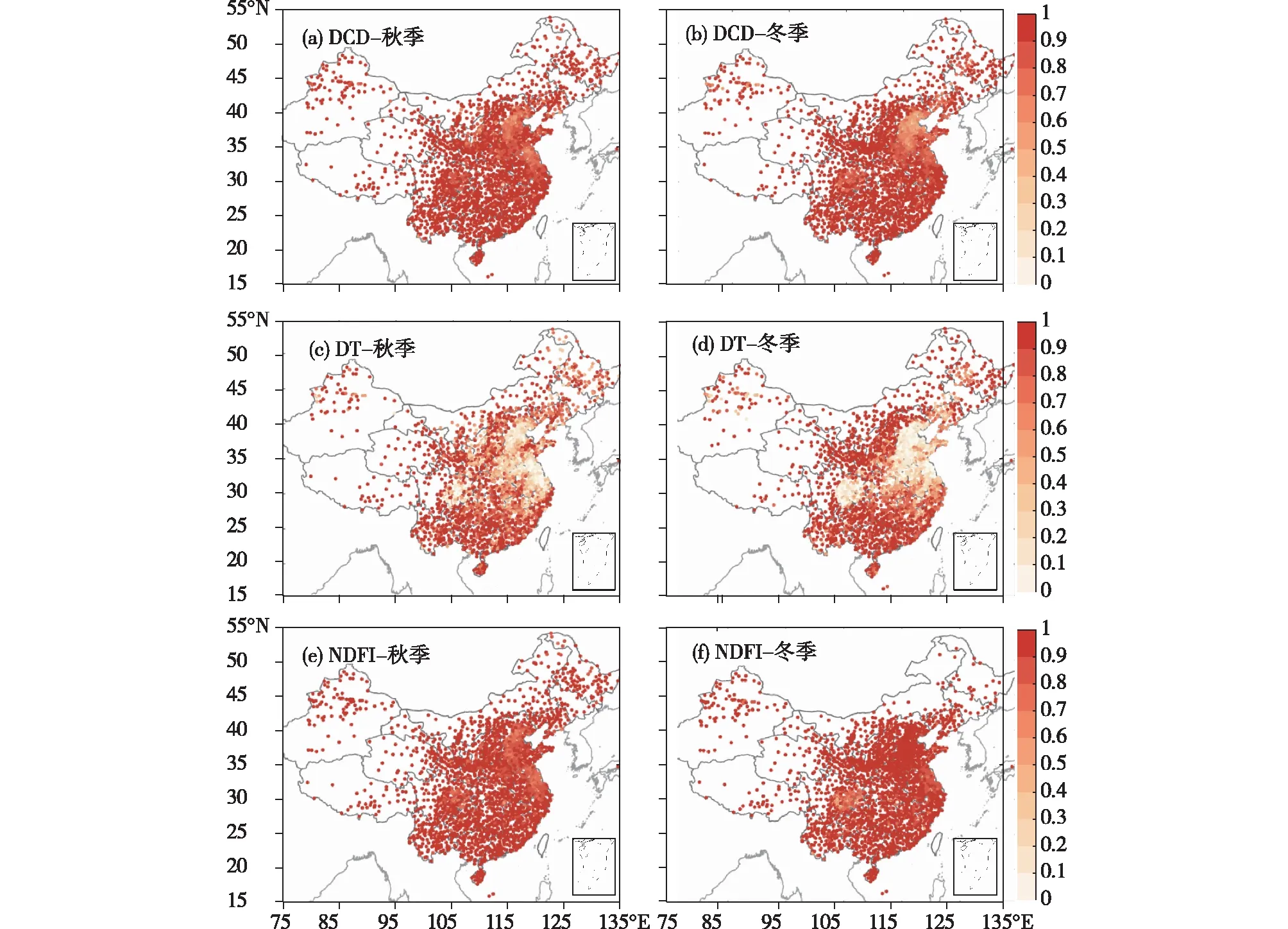
图7 双通道差值法(DCD;a/b)、温度差值法(DT;c/d)及归一化大雾指数法(NDFI;e/f)在秋季(a/c/e)和冬季(b/d/f)反演雾的误判率(FAR,填色)空间分布Fig.7 The same as Fig.4, but for FAR
3.3 双通道差值法与温度差值法的两次雾识别结果比较
用评价雾检测结果的判识率、误判率、鉴定成功评分和准确率指标检验双通道差值法和温度差值法,结果如表5所示。在2016年11月3日的夜间雾过程中,温度差值法比双通道差值法的鉴定成功评分更高,准确率更高,判识率更高。因此,温度差值法对这个过程的反演效果较好。而在2016年12月21日的夜间雾过程中,双通道差值法的鉴定成功评分、准确率和判识率均高于温度差值法,说明双通道差值法对于这个特殊的有云影响的雾过程反演效果较好。由这两个过程的反演情况来看,两种算法对于平原地区的夜间雾识别效果相近,在具体雾过程中各有优势。
3.4 温度差值法在平原地区的误差分析
通过时间、空间适用性分析可知,温度差值法对于我国夜间陆地雾(尤其是平原地区)的反演效果最好;而在个例分析中,双通道差值法对平原夜间雾识别有时比温度差值法表现更好。因此对温度差值法进行误差分析,研究当温度变化1 K时,温度差值法在京津冀地区及其周边(115°~120°E,37°~40°N)的判识率、误判率、鉴定成功评分和准确率的变化,同时与双通道差值法评分进行对比。统计计算得到2016年1月—2018年12月温度差值法在不同条件下的判识率、误判率、鉴定成功评分和准确率月平均值的变化曲线以及双通道差值法的各评价参数月平均值。如图10所示,在10月、11月、12月、1月,温度差值法的误判率很低,说明算法对该区域的夜间雾识别准确率很高。判识率、鉴定成功评分在夏季很低,甚至为0,这可能是由于夏季中高云较多,卫星观测受到影响。在冬季和夏季,双通道差值法的判识率高于温度差值法,但与温度差值法相比,双通道差值法的鉴定成功评分和准确率均较低,误判率全年均较高,说明两种算法中总体上温度差值法对于京津冀地区及其周边的夜间雾反演效果更好。当温度差值法的阈值发生变化时,准确率的变化不大,但判识率、误判率及鉴定成功评分随之发生改变,可见由温度观测不准确产生的误差会影响温度差值法对夜间雾的识别。对比不同阈值下的鉴定成功评分发现,阈值增、减1 K在不同的月份对雾反演结果的影响不同,这说明对于不同的月份应用不同的阈值可能会提高温度差值法的反演效果。
4 结论
本文使用2016年1月—2018年12月夜间Himawari-8静止气象卫星数据,结合我国2 364个气象站逐小时温度、能见度观测资料,从适用季节和空间适用性两个方面对反演方法的鉴定成功评分、准确率、判识率和误判率进行统计分析(不考虑中高云的个例),评估了当前三种经典夜间陆地雾遥感反演方法的适用性,并分别对京津冀地区秋季和华北平原冬季发生的两次夜间雾过程进行分析。主要结论如下:
1)适用季节。由2016—2018年全国观测站点的鉴定成功评分、准确率、判识率及误判率的各月平均值可知,三种夜间陆地雾反演方法在冬季、秋季反演效果最好。三种反演算法中,温度差值法的适用性相对更好,其鉴定成功评分、准确率和误判率评分表现均优于双通道差值法和归一化大雾指数法。
2)空间适用性。三种夜间陆地雾反演算法在秋季和冬季的鉴定成功评分空间分布显示其适用区域多分布于平原和盆地,双通道差值法和温度差值法的反演能力更强。双通道差值法在云贵高原及部分山区的判识率较高,这可能是由于在地形高度较高的地区,低层云与地表相接会形成山地雾,双通道差值法的局限性在于难以区分低层云和雾[21],而山地雾本身是低层云的一部分,导致了双通道差值法的判识率在高原和山区反而有所上升。

图8 2016年11月3—4日京津冀地区夜间雾过程双通道差值法(DCD;a/b/c)和温度差值法(DT;d/e/f)反演的3日21时(a/d)和4日01时(b/e)、04时(c/f)及观测的雾情况(图中填色为地形高度,单位:m;散点为反演与观测对比后的结果,A、B、C、D的含义同表2)Fig.8 Fog observation and retrieval of process at 21:00 BST 3 (a/d), 01:00 BST 4 (b/e), and 04:00 BST 4 (c/f) in Beijing-Tianjin-Hebei region from 3 to 4 November 2016 with DCD (a/b/c) and DT (d/e/f) methods (colored area for altitude, units: m; scattered point for comparison result between retrieval and observation; A, B, C and D denote the same as those in Table 2)
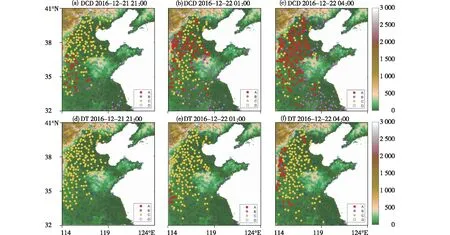
图9 2016年12月21—22日华北平原区域的一次雾过程双通道差值法(DCD;a/b/c)和温度差值法(DT;d/e/f)反演的21日21时(a/d)和22日01时(b/e)、04时(c/f)及观测的雾情况(图中填色及散点含义同图8)Fig.9 Fog observation and retrieval of process at 21:00 BST 21 (a/d), 01:00 BST 22 (b/e), and 04:00 BST 22 (c/f) in the North China Plain from 21 to 22 December 2016 with DCD (a/b/c) and DT (d/e/f) methods (colored area and scattered point denote the same as those in Fig.8)

表5 双通道差值法(DCD)和温度差值法(DT)在两次雾过程中的识别结果比较
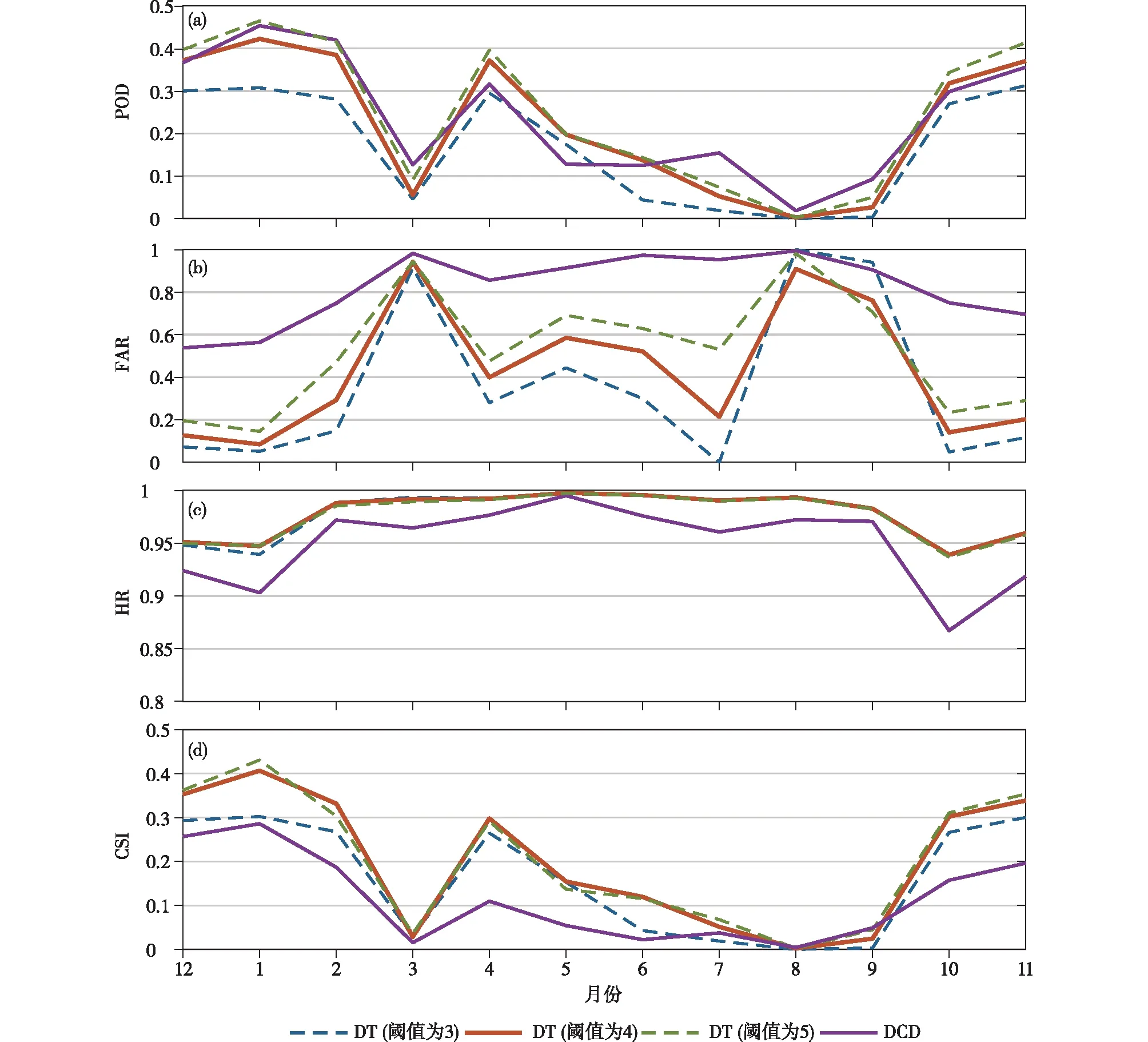
图10 温度差值法(DT)在不同条件下的判识率(POD;a)、误判率(FAR;b)、准确率(HR;c)和鉴定成功评分(CSI;d)月平均值的变化曲线及双通道差值法(DCD)各评价参数的月平均值(研究时间为2016—2018年夜间,研究区域为京津冀地区及其周边(115°~120°E,37°~40°N);紫色实线、蓝色虚线、红色实线、绿色虚线分别代表DCD算法和阈值为3 K、4 K、5 K时DT算法的结果)Fig.10 Variation curve of monthly mean POD (a), FAR (b), HR (c), and CSI (d) of DT algorithm under different conditions and DCD algorithm (research time is nighttime from 2016 to 2018 and research area is Beijing-Tianjin-Hebei region and its surrounding areas, namely 115°-120°E, 37°-40°N; purple solid line, blue dashed line, red solid line, and green dashed line represent DCD results and DT results when the threshold value is 3 K, 4 K, and 5 K, respectively)
温度差值法在平原地区的误判率极低,可能是因为发生在平原地区的辐射雾,其温度随高度的变化不易受地形的影响,更符合辐射雾热剖面理想化模型[22],从而使温度差值法的准确率较高。
3)结合地面观测结果,检验双通道差值法和温度差值法在秋冬季节平原地区两个过程中夜间雾的识别效果。结果显示,两种反演算法对平原地区夜间雾的识别能力均较强,能够准确识别出雾区所在位置,只是在具体雾过程反演中各有优势。
本文对比分析了三种经典夜间陆地雾遥感反演方法的适用性,为不同地区应用夜间陆地雾遥感反演方法提供参考,以期在提高卫星夜间陆地雾遥感反演算法的准确率上提供帮助。在不考虑中高云影响的情况下,三种夜间陆地雾反演算法在时间上更适用于秋季和冬季,在空间上更适用于平原及盆地的夜间雾反演。其中温度差值法的反演效果最好(尤其在平原地区),具有较高的综合评分。然而,总体上三种夜间陆地雾反演方法的各项指标参数整体均处于较低水平,当前夜间陆地雾遥感反演效果还有很大的提升空间。
猜你喜欢
山花(2022年5期)2022-05-12
气象水文海洋仪器(2021年4期)2021-12-11
昆明医科大学学报(2021年4期)2021-07-23
昆明医科大学学报(2021年5期)2021-07-22
就业与保障(2021年23期)2021-04-06
电子制作(2018年10期)2018-08-04
高中时代(2017年7期)2018-02-24
百科探秘·航空航天(2017年10期)2017-11-08
小学阅读指南·低年级版(2016年5期)2016-05-14
电脑爱好者(2015年22期)2015-09-10