基于卡尔曼滤波的IFM系统测量LFM信号载频方法
2021-04-15 08:16李广强
舰船电子对抗 2021年1期
张 雷,李广强
(1.解放军95865部队,北京 102218; 2.空军预警学院,湖北 武汉 430019)
0 引 言
比相法瞬时测频接收机,简称瞬时测频(IFM)接收机,是一种通过频率-相位变换实现频率测量的间接测频系统,不仅具有体积小、频带宽、截获概率高的特点,而且较好地解决了截获概率和频率分辨力之间的矛盾,是机载雷达告警器和雷达对抗侦察设备中经常采用的技术。线性调频(LFM)信号是现代雷达广泛采用的一种脉冲压缩信号,也是雷达对抗侦察重点分析的信号样式之一。但是传统的IFM系统在一个脉冲信号持续时间内,通常只在脉冲前沿进行一次频率测量,因此无法准确获取线性调频信号及其脉内调制信息[1],从而限制了IFM接收机的使用。
文献[2]采用了模数转换(ADC)和线性回归的方法,估计出LFM信号的载频和调频系数,但是只能在全部采样点的频率估值完成后,才能估算调频系数,实时性不够好,因此需要研究更合适的方法。传统IFM系统的微波鉴相器通常输出I、Q两路正交电压,之后采用极性量化或AD量化的方法得到频率数据。根据文献[3]的分析,IFM系统具备测量LFM信号的潜力,本文在此基础上展开研究,对I、Q信号进行AD量化后,通过卡尔曼滤波方法实现IFM系统对LFM信号频率参数的估计。
1 IFM系统原理及测量LMF信号分析
1.1 传统IFM系统基本原理

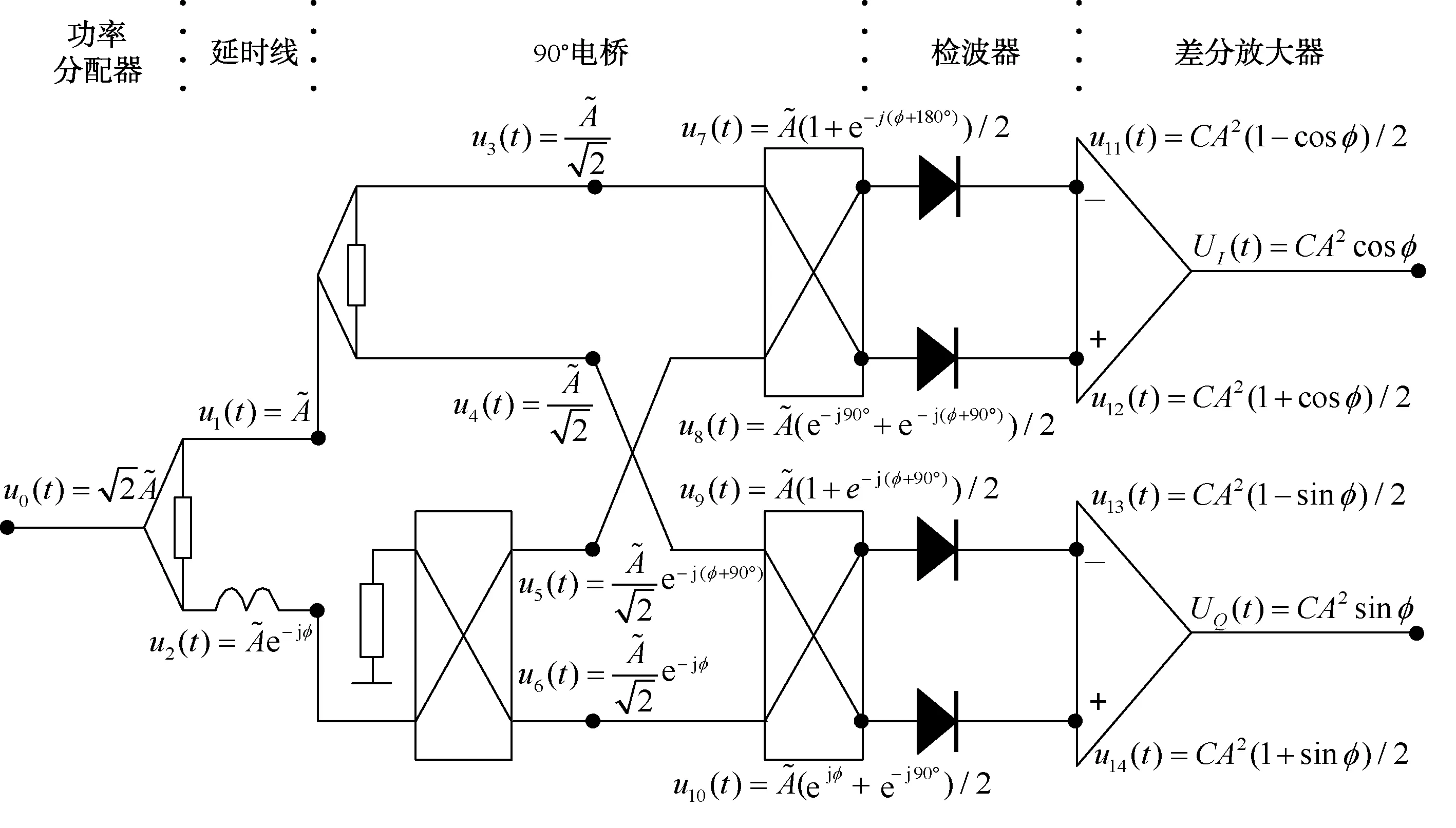
图1 一种实用的微波鉴相器原理图
为了解决测频范围和频率分辨力的矛盾,实际中一般将多个鉴相器并行使用,短延迟线用于扩大测频范围,长延迟线用于提高频率分辨力。图2为k路鉴相器并行使用的IFM系统组成和原理图,相邻鉴相器延迟时间比为n,各鉴相器输出的相位值为φi,i=1,2,3,…,k,最短延迟时间不存在测频模糊,则逐级迭代解模糊和相位校正的计算公式如下[4]:
(1)

为提高测频精度,之后一般用所有鉴相器的相位输出对频率进行最小二乘估计[4]:
(2)
式中:T为最短延迟线的延迟时间;n为相邻2路鉴相器的延迟时间比;k为鉴相器路数;f0为无模糊测频范围内满足f0T乘积为正整数的最小频率值。
在实际工作中,通常k的取值为3或4,n的取值为4或8[4]。
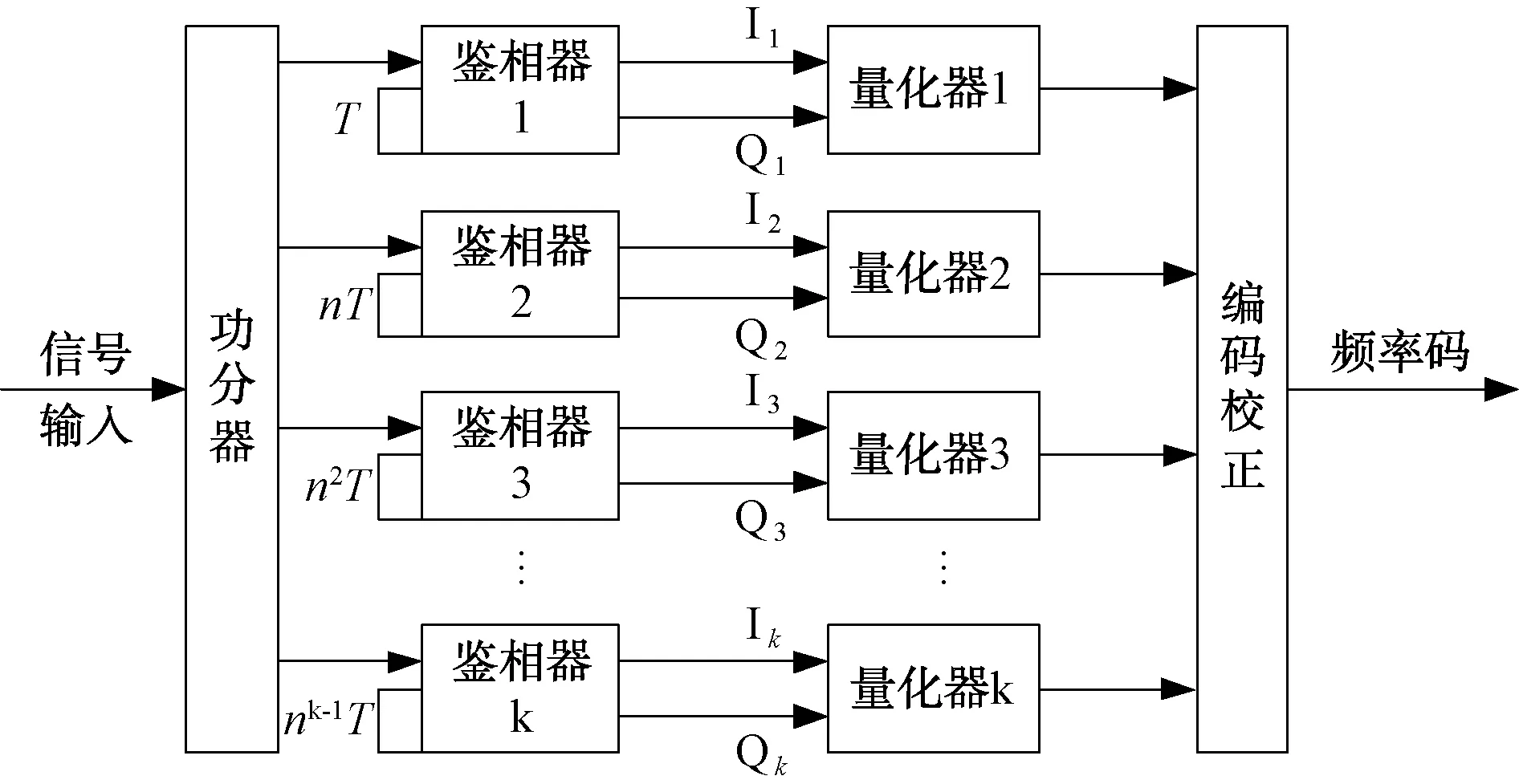
图2 k路鉴相器并用IFM系统组成和原理图
1.2 传统IFM系统对LFM信号处理模型
首先从理论上分析IFM系统对LFM信号的响应情况,假设图1中输入信号u0(t)为一线性调频信号,即:
(3)
式中:f0为信号载频(即起始频率);K为调频系数。
则1~14节点的信号分别为[3]:
(4)
(5)
(6)
(7)
(8)
由于T为ns量级,K为几十到几百MHZ/μs,所以2πf0T≫πKT2,因此式(8)可近似简化为:
(9)
通过式(9)可得到相位差φ。多路鉴相器并用时,不同延迟时间的其他路相位差φi同理可得到,再根据式(2)可得到载频的估计值,重复间隔、脉宽等参数值仍按照原方式测量。由此可见,IFM系统在理论上具备测量LFM信号频率的能力,但需要对后续的信号处理方式进行改进。
2 改进IFM系统测量LMF信号方法
通过上一节分析可知,LFM信号进入传统IFM系统,经过微波鉴相器也输出I、Q两路正交电压,由于传统IFM系统在脉冲持续时间内只进行一次时间采样,所以只能得到一个载频值。如果对鉴相器输出的时间连续信号UI、UQ进行AD量化,根据式(2)得到载频估计值序列,再将估计值进行卡尔曼滤波,经过递推运算,在脉冲持续时间内能够得到精度较高的载频值和调频系数,从而可以实现IFM系统对LFM信号的实时测量。
2.1 卡尔曼滤波模型
卡尔曼滤波是一种时域滤波方法,利用含有噪声的观测值对动态系统的当前状态进行最优估计,采用了状态空间的方法描述动态系统,算法则采用了递推的形式,便于计算机编程实现,数据实时更新,对数据存储量的要求低,既可以处理平稳随机过程,也可以处理多维和非平稳过程,广泛使用于导航、制导、全球定位、目标跟踪等领域。
假如有一个线性的动态系统,该系统可以表示为Xt=AXt-1+BUt-1+W,即系统当前时刻的状态可以根据上一时刻的状态和控制变量来推测,其中Xt为系统在t时刻的状态,A为状态转移矩阵,Ut-1为t-1时刻系统的控制量,B为控制矩阵,W为系统过程噪声。如果可以使用某种传感器观测系统的状态值Xt或与Xt相关的其他参数,则卡尔曼滤波器的计算过程如下[5]:
(1) 观测方程
Zt=HXt+V
(10)
式中:Zt为系统在t时刻的观测值;H为观测矩阵;Vt为观测噪声。
(2) 状态预测方程
(11)

式(10)和(11)中X、U、W、Z、V均为多维向量,W和V一般假设为均值为0、协方差矩阵分别为Q和R的不相关高斯白噪声,Z的维数等于或小于X。
(3) 协方差矩阵预测方程
Pt|t-1=APt-1AT+Q
(12)
式中:Pt-1为t-1时刻的协方差矩阵;Pt|t-1为根据t-1时刻的协方差矩阵Pt-1计算的t时刻的协方差矩阵预测值。
(4) 滤波增益矩阵方程
Kt=Pt|t-1HT[HPt|t-1HT+R]-1
(13)
式中:Kt为t时刻的滤波增益矩阵。
(5) 状态更新方程
(14)
(6) 协方差矩阵更新方程
Pt=(I-KtH)Pt|t-1
(15)
式中:I为单位矩阵。
2.2 采用卡尔曼滤波的改进IFM系统
图2中虽然含有非线性器件,但整体是一个对线性信号相关参数进行测量的系统,因此可以认为是一个线性系统,根据LFM信号载频表达式f=f0+Kt推导系统的状态方程,将式(9)作为观测方程,从而采用卡尔曼滤波得到LFM信号的估计参数。
需要估计的LFM信号参数主要是载频f和调频系数K,则系统的状态Xt为:
(16)
设Δt为时间间隔,根据LFM信号载频表达式,有ft=ft-Δt+KΔt,调频系数K为常量,且该系统中无控制量,所以状态转移矩阵为A=[1,Δt;0,1],系统状态方程为:
(17)
令Q为W的不相关协方差矩阵,由于式(17)描述的系统状态是准确的,影响因素是雷达发射机性能,所以认为过程噪声为0,即Q=[0,0;0,0]。IFM系统只能测量信号的频率,所以观测矩阵为H=[1,0],观测方程为:
(18)
IFM系统的测频误差为时间误差与相位误差之和,其中时间误差是由延迟线的物理特性引起的,相位误差包括鉴相器误差、量化误差、系统噪声误差以及式(9)的截断误差等。其中鉴相器误差服从高斯分布,各误差变量的影响因素不同,可以认为是相互独立的,因此可假定IFM系统测频误差服从均值为0、方差为σ2的高斯白噪声,则V的方差R=[σ2]。至此,卡尔曼滤波模型建立完成。
图3为采用了多路ADC和卡尔曼滤波器的改进IFM系统,多路ADC的相位采样输出首先按照式(1)和式(2)解算载频值,然后经卡尔曼滤波器输出降噪后的载频值和调频系数,输出显示部分将载频和调频系数的数值以及载频曲线直观地显示出来。卡尔曼滤波近似实时进行,可以认为延时为0;转换时间短的ADC可达几十ns量级,因此经过改进的IFM系统测量信号的延迟时间仍为ns级,不影响IFM系统对实时性的要求。

图3 改进的k路鉴相器并用IFM系统
3 仿真及分析
为验证改进IFM系统的有效性,采用文献[2]中的线性调频信号参数,使用MATLAB进行仿真。假设采用4路鉴相器并用的改进IFM系统,基本延迟线延迟时间为50 ns,延迟时间比为4,即k=4,T=50 ns,n=4;线性调频信号的起始频率为4 000 MHz,终止频率为4 200 MHz,脉宽为10 μs,即f0=4 000 MHz,τPW=10 μs,K=20 MHz/μs;传统IFM接收机测频误差为2 MHz,即σ=2 MHz;模拟采样点数为1 000点。在卡尔曼滤波初始化时,将第1个观测值设置为第1个卡尔曼估计值f1,初始调频系数设置为1 MHz/μs,初始协方差矩阵设置为[σ2,0;0,1],从第2个采样点开始进行迭代运算。
3.1 采用卡尔曼滤波的改进IFM系统输出
采用以上数据进行仿真,得到采样后未经卡尔曼滤波和经过卡尔曼滤波的LFM信号时间-载频图,如图4和图5所示。在图4中,虽然可以观察出信号的载频值近似呈线性变化,但存在较大的误差噪声,而且无法直接得到调制系数的准确估计值;在图5中,载频的误差噪声明显减小,测得终止频率为4 199.7 MHz;每一个采样点的载频和调频系数估计值都可实时给出,在第800到1 000个采样点处(即8~10 μs),调频系数约为19.98 MHz/μs,较文献[2]中测得的调频系数19.87 MHz/μs,精度进一步提高;根据终止频率和调频系数,计算得到初始频率f0为3 999.9 MHz。
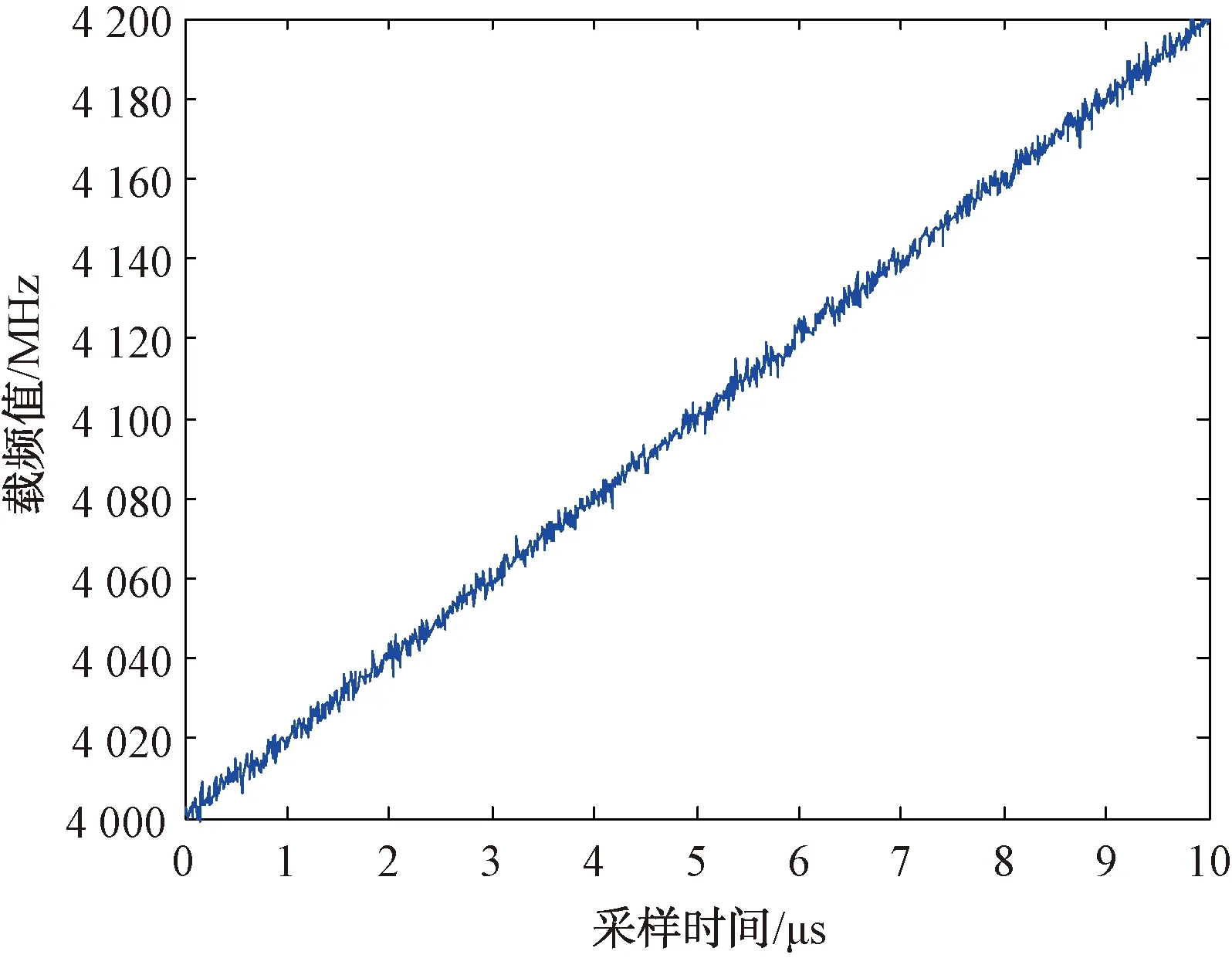
图4 未经卡尔曼滤波的LFM信号时间-载频图
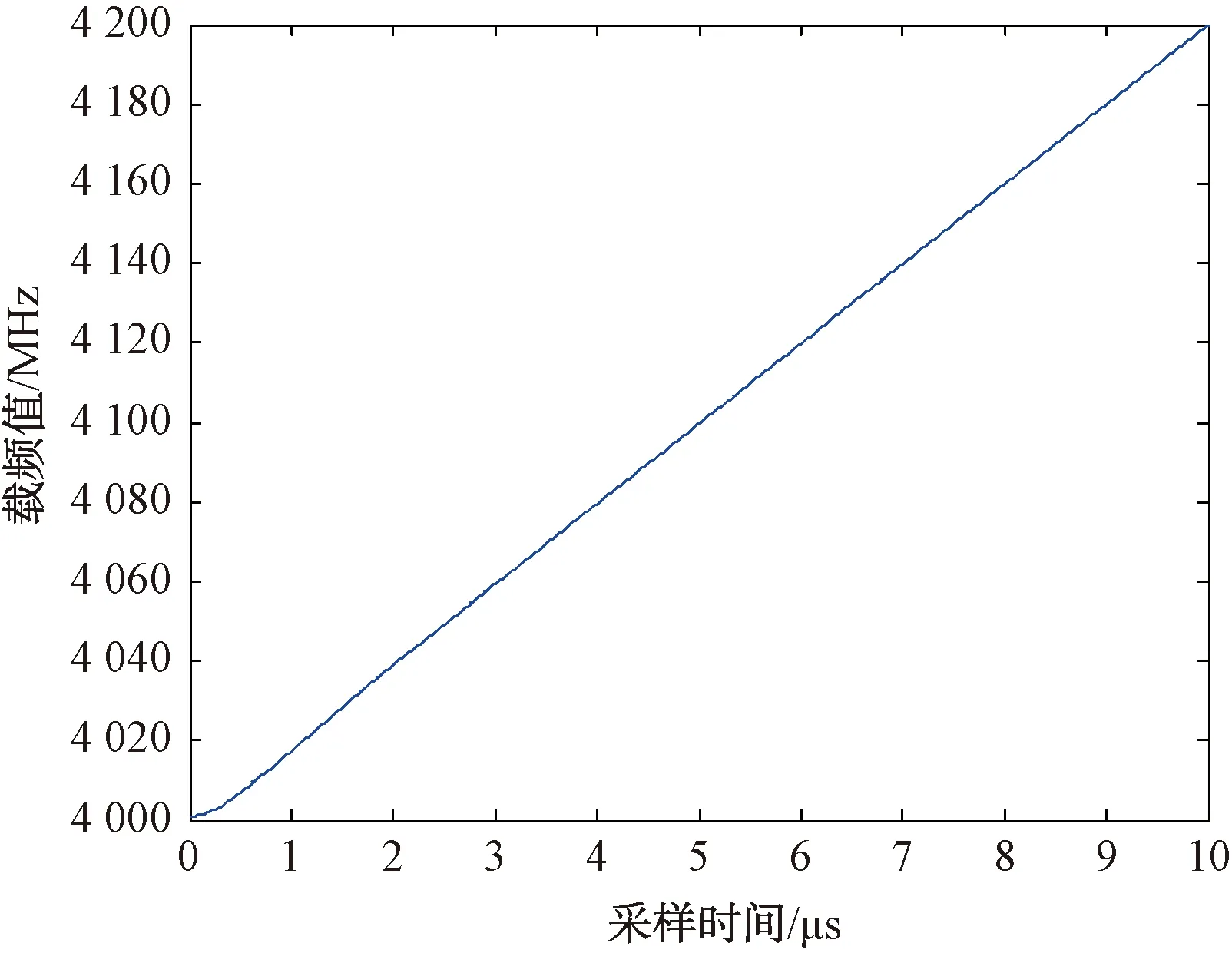
图5 经过卡尔曼滤波的LFM信号时间-载频图
3.2 误差分析
图6和图7分别为卡尔曼滤波后的LFM信号的载频误差曲线和调频系数误差曲线,从图中可以看出,在脉冲持续时间末段,载频误差和调频系数误差都近似为0,但测频误差经过约2.2 μs的震荡后才趋于稳定,最大误差达到了4.1 MHz。但是该震荡误差并不会影响对信号的实时判读,而且可以在事后分析信号时,使用终止频率和调频系数反推前段的载频数据,从而消除震荡误差的影响,获取整段脉冲的载频精确值。总体来看,经过卡尔曼滤波,IFM系统的测量精度明显提高。
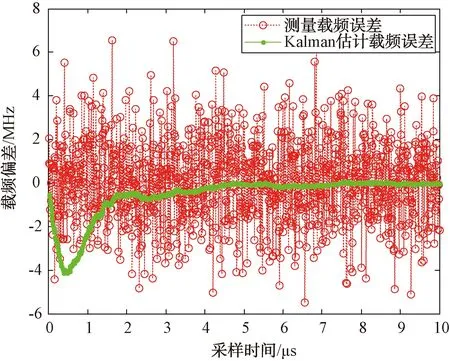
图6 经过卡尔曼滤波的LFM信号载频误差曲线

图7 经过卡尔曼滤波的LFM信号调频系数误差曲线
通过以上仿真还可以看出,随着迭代次数的增多,估计值的误差将减小,即误差随着脉宽增加而减小。LFM信号的脉宽一般大于5 μs,对信号的采样点数为1 000个以上即可确保测量精度,所以应选择采样频率为500 MHz以上的ADC。对于固定载频的雷达脉冲信号,可以看作是调频系数K=0的特殊情况,因此改进的IFM系统也能够对固定载频信号进行测量。
4 结束语
通过对基于卡尔曼滤波的改进IFM系统的仿真和分析,表明该方法可以有效测量LFM信号的载频和调频系数,并且具有参数估计精度高、实时性好的特点;由于卡尔曼滤波的特性,在脉冲前段存在一定的震荡,造成了较大测频误差,但是可以通过事后的信号数据整理分析来消除震荡噪声,不会影响对信号特征的判断。但在建模过程中,没有考虑信噪比和同时到达信号的影响,这是下一步需要研究完善的内容。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
物联网技术(2022年7期)2022-07-21
农业与技术(2022年12期)2022-07-04
卫星电视与宽带多媒体(2022年4期)2022-05-06
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
读与写·教育教学版(2017年10期)2017-11-10
环球人物(2017年3期)2017-03-31
南都周刊(2015年4期)2015-09-10
南都周刊(2015年3期)2015-09-10