基于动态云贝叶斯网络的舰艇防空目标威胁评估
2021-04-15 06:11李旭辉顾颖彦韩兴豪
舰船电子对抗 2021年1期
李旭辉,顾颖彦,韩兴豪
(江苏自动化研究所,江苏 连云港 222061)
0 引 言
随着现代信息化战争中各种高精尖武器的使用,现代战场态势更加复杂化。指挥员需要在短时间之内处理海量多元信息,这便对现代指控系统的智能评估提出要求。
威胁评估是舰艇作战火力分配和机动指挥的前提,是舰艇作战指挥中的重要一环。威胁评估[1-2]能够根据实时态势分析各个目标的威胁值,并基于威胁程度对各个目标进行排序。目前威胁评估的主要方法有线性加权法、神经网络[3]、贝叶斯网络、层次分析法、模糊理论等。文献[4]提出了基于模糊分类的动态贝叶斯网络模型,有效地解决了舰艇防空威胁评估问题,但是该方法在随机性知识表达方面存在缺陷。文献[5]提出了一种离散动态贝叶斯网络模型,用约束最大后验概率估计算法学习网络参数,能有效处理不确定对抗下的威胁评估任务。但贝叶斯网络(BN)模型结构由领域专家直接提出,具有较强的主观性。基于结合作战数据学习和专家知识的BN结构模型更加客观,能够有更强的模型适应性和实用性。
基于上述思考,本文提出了一种基于结构学习的动态云贝叶斯网络的威胁评估模型,利用云模型知识表达模糊性和随机性的特点,对连续的威胁因子进行离散化;再采用爬山算法对贝叶斯网络进行结构学习,综合学习结果和专家知识构建模型网络结构;最后使用最大似然估计算法和联合树算法学习网络参数和推理,评估观测目标威胁等级的后验分布。
1 动态云贝叶斯网络
1.1 云模型
云模型是一种在定性语言和定量数值之间建立映射关系的模型[6],它可以刻化定性定量两者之间的随机性和模糊性,具有良好的知识表示能力。
云模型定义如下:设U是一个用精确数值表示的定量论域,C是U上表示定性的概念,若x∈U,且x是定性概念C上的一次随机实现,x对C的确定度μ(x)∈[0,1]是具有稳定倾向的随机数:
μ:U→[0,1],∀x∈U,x∈μ(x)
(1)
x在论域U上的分布称为云模型,μ(x)称为x对U的隶属度,x称为云滴,用drop(x,μ(x))表示。
云模型可以用期望Ex,熵En,超熵He3个数字特征来表示,即C(Ex,En,He)。期望Ex表示论域U中的隶属度μ(x)=1的点,是论域U的中心;熵En表示云模型x不确定性的范围,是云模型模糊性的体现,熵越大表示云模型裕度越大;超熵He表示样本出现的随机性,用来表示熵的不确定性,超熵越大,云层越“厚”。图1所示为Ex=10,En=5,He=0.3,云滴数N=2 000的正态云模型。

图1 正态云模型
1.2 动态贝叶斯网络
贝叶斯网络(BN)是用有向图来描述概率关系的理论。BN理论是采用概率理论在网络节点上进行推理计算,用已知的观测节点去推算未知隐藏节点的一种方法。
动态贝叶斯网络(DBN)是将静态BN与时间信息相结合,形成具有处理时序数据的新随机模型[7]。DBN由T个时间片的BN和时间片间的状态转移概率组成,模型前一时刻会对后续时刻状态产生影响。在条件独立性假设的前提下,动态贝叶斯网络推理的贝叶斯公式可以表示为:
(2)
式中:n∈[1,T],表示第n个时间片;xni表示第n个时间片上的子节点;P(xn1,xn2,…,xnj)表示子节点的联合概率分布;Pa(xni)表示xni的父节点集合,父节点Pa(xni)的边缘分布和子节点的条件概率分布P(xni|Pa(xni))通常由专家直接给出或由数据参数学习得出。
动态云贝叶斯网络是将云模型和动态贝叶斯网络结合,利用云模型的不确定性和随机性特点处理实际作战中的不确定连续型数据,再使用动态贝叶斯网络模型评估目标威胁。
2 改进的威胁评估模型及流程
对空中目标进行威胁评估是对其进行有效火力打击的基本前提,国内外学者对目标威胁评估进行了大量研究。基于动态云贝叶斯网络的威胁评估方法首先需要分析防空任务中的威胁因子,将其中连续型威胁因子进行云模型离散化;其次结合专家知识和数据,通过结构学习算法分析态势要素之间关联性,确定网络内结构;然后使用最大似然估计算法计算贝叶斯网络的网络参数;最后将观测信息作为证据对隐藏节点进行网络推理,得到各个时刻的威胁概率分布。其具体流程如图2所示。

图2 威胁评估模型流程图
2.1 任务想定
本文考虑5种不同类型的空中目标,包括反舰导弹、攻击型飞机、辅助型飞机、侦察机以及以民用飞机为主的其他无威胁型飞机。反舰导弹和攻击型飞机是携带大杀伤力武器的空中目标,对舰艇有致命性打击效果,毁伤效果强,威胁等级高;辅助攻击型飞机主要包括干扰机、预警机等,能够干扰破坏舰艇的电子通讯设备、搜索监视我方空中和海上目标,毁伤能力强,且具有一定程度的威胁;侦察机主要在远距离高空中执行侦察任务,威胁等级中等;其他飞机主要包括民用飞机、民用运输机等,不具有毁伤能力,威胁程度低。
在舰艇防空作战任务中,影响目标威胁程度的威胁因子多种多样,结合实际作战和专家知识,本文考虑的威胁等级影响因素包括目标意图、毁伤能力、目标类型、航路捷径、敌我应答识别、目标距离、电磁辐射、目标高度、目标加速度、目标速度和雷达截面积。各个节点的状态空间如表1所示。
在上述的节点变量中,航路捷径、目标距离、目标高度、目标加速度、目标速度都属于连续型变量。本文使用云模型的方法,利用云模型随机性和不确定性的特点,对连续型变量进行离散化处理。云模型离散化分为3步,首先确定各个连续变量划分状态数目N,将变量区间分为N个子区间[U1,U2,…,UN];其次确定各个区间云模型的3个数字特征Ex、En、He,生成各个状态下的云模型[C1,C2,…,CN];最后将连续变量的数值输入到各状态下的云模型中,得到在各区间的隶属度[μ1,μ2,…,μN],将隶属度归一化后得到各个区间的概率,依据概率将连续变量离散到各个区间。

表1 节点变量状态空间
本文将5种连续变量由高到低分成3~4个区间,各个区间的具体云模型参数如表2所示。隶属度计算采用正太云模型隶属函数,函数定义如下:
(3)
根据各个区间云模型参数,使用正向云发生器(FCG)对各连续变量生成云滴数N=2 400的变量云簇,各连续变量云簇如图3所示。

表2 连续变量云模型参数

图3 连续变量云簇
2.2 基于爬山算法的BN结构学习
目前研究的舰艇防空威胁评估模型网络结构一般由专家直接给出。但在实际的舰艇威胁估计任务中,由专家直接设定的贝叶斯网络结构和模型参数具有主观性,不能完全满足不同类型、不同作战分工的舰艇的作战需求。而由舰艇直接收集到的作战数据学习得到的网络结构虽然能在训练集上有不错的性能,但这对样本的数据量大小提出了要求,数据量小容易使模型过拟合,而大量的真实作战数据又难以获取。因此,本文结合数据学习和专家知识,先采用爬山算法从训练数据学习得到评分最优的网络结构,再综合专家网络改进模型结构。
爬山算法是一种基于评分搜索的网络结构学习算法,它通过在搜索过程中不断地进行加边、减边以及删除边的局部操作,并根据评分函数变化来确定是否选择该操作[8]。爬山算法的主要流程如表3所示。

表3 爬山算法步骤
本文使用1 000组威胁评估训练数据对威胁评估模型进行学习,通过Bdeu评分函数对网络结构评估分数,得到每个节点最强关联度的节点集合和网络最优评分结构DAG。结合专家直接给出的网络模型[4],增加网络中目标类型和目标距离之间的边。因为反舰导弹和攻击型飞机执行攻击任务时通常从远距离启动,随着时刻目标距离由远逐渐变近;而辅助型飞机和侦察机执行任务时通常全程在中远距离的高空。所以2个节点之间存在较强的关联性。
为了使模型具有处理时序信息的能力,将单时间片的贝叶斯网络模型拓展到相邻时间片下,使BN模型扩展成为DBN模型。威胁评估动态贝叶斯网络模型结构如图4所示。在图4中,长方形节点表示威胁评估模型中的观测节点,椭圆形节点表示模型中的隐藏节点。将舰载传感器得到的敌方目标观测信息云化处理后作为威胁评估模型中的证据信息,再使用贝叶斯网络推理算法推算隐藏节点的概率分布。

图4 威胁评估DBN模型结构图
2.3 网络参数学习
确定威胁评估模型网络结构,本文使用最大似然估计[9](MLE)算法学习威胁评估模型的网络参数。模型的网络参数包括父子节点间条件概率分布、时间片间的威胁等级的状态转移概率分布和威胁等级的边缘概率分布。本文使用1 000组数据对动态贝叶斯模型进行参数学习,其中每组数据包含10个时刻。参数学习得到的威胁等级的边缘概率、状态转移概率以及条件概率分布如表4~表6所示。其中,H、M、L分别表示毁伤能力强、中、弱;而A、S、M、O分别表示目标意图为攻击、辅助攻击、侦察和其他。

表4 威胁等级边缘概率分布

表5 威胁等级状态转移概率

表6 威胁等级条件概率分布
3 推理威胁评估
为了验证动态云威胁评估模型的可行性和有效性,本文假定我方舰艇在某时刻检测到5个不同类型的目标,雷达记录了连续10个时刻的目标观测数据,展示几种不同类型目标执行任务的观测数据进行分析。表7展示了反舰导弹执行攻击任务模拟生成的1组观测数据。将观测数据通过云模型离散化方法预处理,处理后数据如表8所示,可以看出离散化后数据具有一定的差异,这体现了云模型的不确定性和随机性的特点。最后使用联合树算法[10]推理云化后的观测数据、计算威胁等级、目标类型、目标意图的后验分布。

表7 反舰导弹观测数据
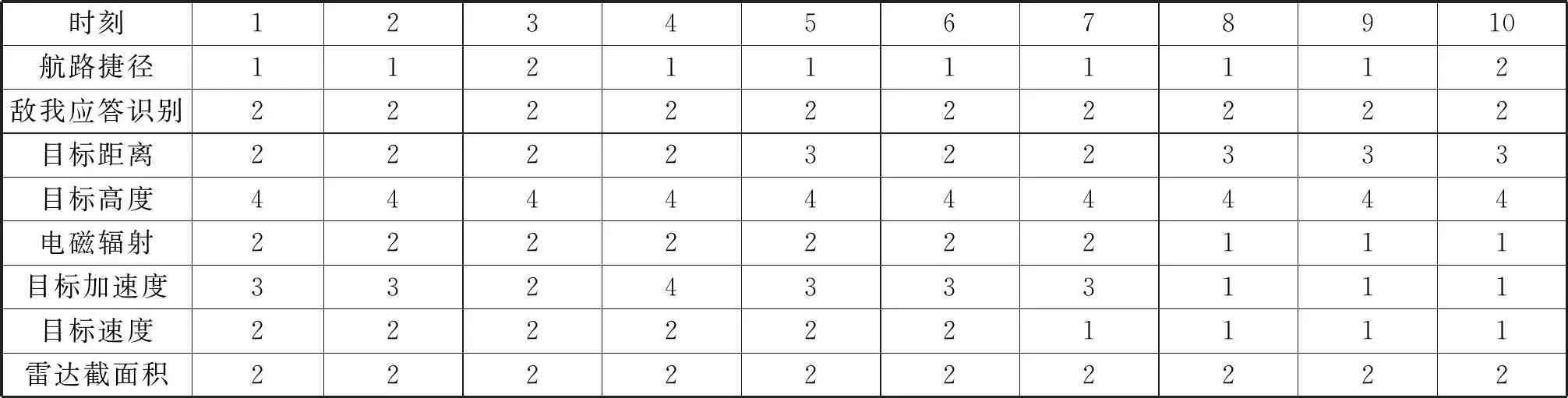
表8 反舰导弹云处理观测数据
将威胁等级低、中、高分别赋予权值[0,0.5,1],计算出直观表示威胁程度的威胁评估值,显然威胁评估值在区间[0,1]内,数值越大表示威胁越高。表9对比了反舰导弹在执行攻击任务时在不同模型下10个时刻的威胁评估值,其中原模型表示专家提出的动态贝叶斯网络模型,改进模型表示结构学习和专家知识融合后的动态贝叶斯网络模型。从表中可以看出,2种模型都能够较好地完成威胁评估任务,原模型由于变量节点间关联性较差,推理结果与实际情况贴合不够,而改进后模型威胁评估数值更为合理。

表9 反舰导弹2种模型在10个时刻威胁评估值推理结果
表10和表11展示了攻击型飞机在执行攻击任务时,2种模型在第10个时刻的目标类型和目标意图的推理结果。由于反舰导弹和攻击型飞机在执行攻击任务时在观测变量上有一定程度的相似性,导致原模型目标类型的推理结果并不准确;而2种模型在目标意图上的推理结果相差不大。综合上述两者,基于结构学习的改进模型推理结果更为可靠。图5展示了反舰导弹、攻击型飞机、辅助型飞机、侦察机和其他类型飞机分别执行攻击、辅助攻击、侦察和其他任务时10个时刻的威胁评估值。从图中可以看出,改进模型对于不同类型的目标得到的结论与实际情况基本相符。

表10 攻击型飞机两种模型在第10时刻目标类型推理结果

表11 攻击型飞机2种模型在第10时刻目标意图推理结果
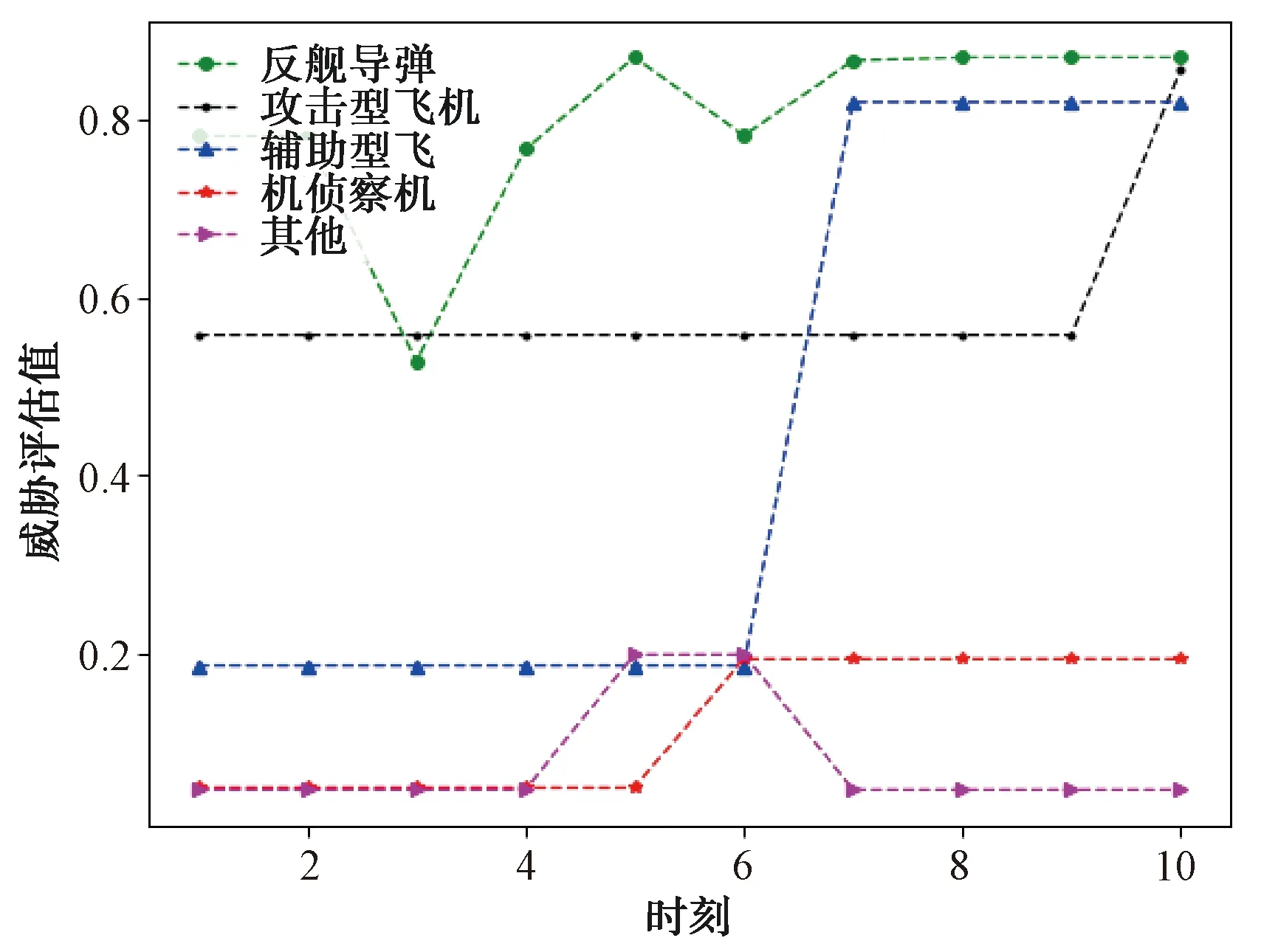
图5 改进模型各类型目标威胁评估结果
4 结束语
本文通过基于网络结构学习的动态云贝叶斯网络模型对舰艇防空中目标的威胁等级进行评估。该方法利用了云模型知识表达的不确定性和随机性的特点,将舰艇防空威胁因素中的连续变量离散化;结合网络学习和专家知识,学习得到更有效的贝叶斯模型网络结构,增加了原结构内部的关联性;最后利用动态贝叶斯网络的推理能力,求解各个时刻目标的威胁等级、目标类型和目标意图的概率分布。
威胁评估的推理结果表明,动态云贝叶斯网络模型在舰艇防空威胁评估问题上是有效的,改进网络模型和原模型相比,在推理结果上具有更优秀的表现。此外,贝叶斯网络参数学习的速度和其他智能威胁评估模型,将是笔者下一步研究的重要问题。
猜你喜欢
卫星应用(2022年7期)2022-09-05
卫星应用(2022年3期)2022-05-23
卫星应用(2022年1期)2022-03-09
红领巾·探索(2020年5期)2020-05-19
环球慈善(2019年6期)2019-09-25
智富时代(2018年11期)2018-01-15
智富时代(2018年11期)2018-01-15
科教导刊·电子版(2017年32期)2018-01-09
数学学习与研究(2017年10期)2017-06-22
文理导航·科普童话(2015年6期)2015-07-29