增程式混合动力洗扫车控制与仿真分析
2021-04-08 07:34钟勇林宁魏忠彬
福建工程学院学报 2021年1期
钟勇, 林宁,魏忠彬
(福建工程学院 福建省汽车电子与电驱动重点实验室,福建 福州 350118)
国内洗扫车的动力系统一般采用双发动机形式。在作业工况下,由于车辆低速行驶,主发动机无法工作在高效区域,容易产生尾气排放与噪音,对环境有一定污染。
目前国内对专用车领域特别是洗扫车,研究主要集中于纯电动驱动,但为了保证续航和大功率作业需要配备大容量电池,从而使车辆重量增加,导致能量的有效利用率降低。对此,一些高校和企业对洗扫车的发展趋势进行分析[1],甚至也开始关注太阳能技术的使用[2-3],根据现有的技术,文献[4]采用增程式混合动力,上装洗扫装置通过分动器与发动机耦合,但在进行作业时控制较为复杂。文献[5]提出混联的动力系统,在结构和控制方面也更为复杂。本文以某一款洗扫车为原型,根据工况需求对其主要参数进行匹配,运用AVL-Cruise软件同时建立增程式混合动力洗扫车和传统双发动机洗扫车模型,在Matlab/Simulink平台建立功率跟随控制策略,通过仿真进行对比,增程式混合动力洗扫车比传统洗扫车具有更好的燃油经济性,仿真达到预期效果。
1 增程式混合动力系统结构及参数匹配
1.1 系统结构
洗扫车的作业工况多是低速行驶,增程式系统布局不需要携带大容量的电池就能满足洗扫车作业时风机、水泵和油泵的功率需求,还能保证车辆低排放的环保要求。结合当前技术[6-7],本文提出的增程式混合动力系统结构如图1所示,车辆作业或者行驶过程中电池给电机提供电能,当出现电池电量过低时,电池给ISG电机提供电能带动发动机启动,保证发动机处于高效低排放工况,发动机再带动ISG电机发电,给电池充电,电池继续提供电能给行驶与作业系统电机,动力实现完全解耦。

图1 增程式混合动力系统结构Fig.1 Range-extended hybrid power system structure
增程式混合动力洗扫车以现售某款洗扫车为原型设计,采用后轮驱动布局,车辆主要参数如表1所示。

表1 车辆主要参数Tab.1 Main parameters of the vehicle
1.2 驱动电机选型
汽车行驶过程中主要受到滚动、空气、坡度以及加速阻力,车辆正常行驶,匹配的驱动电机功率应满足如下方程:
(1)
式中:ηT为机械效率;m为汽车总重量(kg);g为重力加速度(N/kg);f为滚动系数;为道路坡度;va为车速(km/h);CD为空气阻力系数;A为迎风面积(m2);为旋转质量换算系数;dv/dt为加速度(m/s2)。
车辆最高速度与驱动电机所能提供的最高转速满足:

(2)
式中:umax为最高车速(km/h);nmax为驱动电机的最高转速(r/min);r为车轮半径(mm);i0为主减速器比。
增程式洗扫车主要在市区行驶,最高车速设置80 km/h,由于目前国际标准尚未对专用车辆的最大爬坡度有明确要求,根据(GB50180—93)《城市居住区规划设计规范》规定:机动车道道路纵坡度控制指标应小于8%,本文选取设计目标最大爬坡度为10%,车辆在此坡度上以10 km/h匀速行驶。
当车辆以80 km/h的最高时速行驶时,电机输出功率为127.8 kW,所以选取电机额定功率为150 kW、峰值功率为200 kW的异步电动机,最大转速为3 500 r/min,额定转速为800 r/min。
1.3 辅助动力单元的选型
辅助动力单元(APU)是指发动机和发电机组,发动机不直接参与车辆的驱动,主要用于发电,当电池的荷电状态过低时,整车控制器就会发送指令开启APU为电池供电。由于洗扫车主要是在市区作业以及转场,所以辅助动力单元的输出功率既要满足市区转场时的车速行驶,也要满足市区作业时的动力和洗扫装置,还要考虑空调、冷却系统、转向电机等电气装置。由此得到辅助动力单元输出功率满足式(1)及式(3)。
PAPU=PMW+Psweep+PHVC
(3)
式中,PAPU为APU的输出功率(kW);PMW为行驶驱动电机在作业工况下的输出功率(kW);Psweep为洗扫装置驱动电机功率(kW);PHVC为空调、冷却系统、转向电机等附件的功率(kW)。
洗扫车的转场工况参考中国重型商用车的市区工况,作业工况下行驶车速不超过20 km/h,结合式(1)和式(3),初步计算得到最大需求功率约为100 kW,故选取额定功率为120 kW、峰值功率为150 kW的异步电机作为辅助动力单元的发电机。为了与发电机匹配,并考虑连接的机械效率,选取一款排量6.5 L的柴油发动机作为辅助动力单元的动力源,该发动机最大输出功率162 kW,最大扭矩890 N·m。
1.4 电池组的选型
为减少大容量电池带来的负担,根据文献[8]对电池性能分析,采用磷酸铁锂能量型电池,3块单体并联成块,192块单体串联成组,单体电压为3.2 V,电池组总电压为614.4 V,总电池电量为48 kW·h,电池放电深度为80%,单体电池放电电流为3C,C为放电倍率。
2 能量管理策略的设计
混合动力洗扫车的能量管理控制主要是实现燃油经济性,所以尽可能使用电池组中的电能来满足车辆的功率需求。当电池的荷电状态(SOC)过低时,启动APU为电池组供电,使电池组的SOC保持在一个合理的范围来减少容量损失,延长电池组的使用寿命,为了防止电池过充和过放,电池的荷电状态满足:
SOClow≤SOC(t)≤SOChigh
(4)
式中,SOClow为电池放电时的最低荷电状态;SOChigh为电池充电时的最高荷电状态。
车辆行驶过程主要包含以下2种模式:
(1)纯电动行驶:洗扫车的电池处于SOChigh区域,此时电池满足车辆在市区的转场,APU关闭,车辆零排放。
(2)APU开启行驶:洗扫车的电池处于SOClow,ISG电机带动发动机启动,保证发动机运行在低油耗工作区域,APU为电池组充电,洗扫车作业时,需求功率大,发动机提高输出功率,保证洗扫正常作业。在功率跟随控制策略下,尽可能使发动机运行在最低燃油消耗线[9],降低排放。
制动过程中,传统机械制动产生的最大制动力矩为:
MB=2·pB·AB·ηB·μB·rB·cB
(5)
式中,MB为制动力矩(N·m);pB为单侧制动有效压力(MPa);AB为制动器活塞面积(mm2);ηB为制动效率;μB为摩擦系数;rB为有效摩擦半径(mm);cB为特定制动系数。
根据电机特性,当电机进行制动能量回收时,工作状态属于第四象限,产生的最大制动力矩为驱动电机最小扭矩[10],若驾驶员需求的制动力矩大于驱动电机最小扭矩,将由机械制动补充所需求的制动力矩:
TB(t)=MB·BP-TM_min·Fd·ηm
(6)
式中,TB(t)为机械制动补充的制动力矩(N·m);Bp为制动踏板开度;TM_min为驱动电机最小转矩(N·m);Fd为主减速器传动比;ηm为机械效率。
APU仅在SOC>SOChigh时关闭,当SOClow≤SOC≤SOChigh时,加入APU模式判断,如果APU开启就进入运行模式,避免发动机频繁启动,发动机启动时输出功率满足:
Pice=PTMA+PHVC+Psweep+PSOC
(7)
式中,PTMA为当前驱动电机需求功率(kW);PHVC为空调、冷却系统、转向电机等附件装置的功率(kW);Psweep为洗扫装置驱动电机功率(kW),在非作业工况下Psweep= 0;PSOC为电池充电功率(kW)。
3 仿真与分析
增程式混合动力洗扫车仿真模型在AVL-Cruise软件中搭建,如图2所示,通过Matlab/Simulink建立控制策略后编译生成DLL文件与Cruise进行联合仿真。为了与传统的双发动机洗扫车对比,同时在Cruise中建立了传统洗扫车模型,如图3所示。

图2 增程式混合动力洗扫车Cruise模型Fig.2 Cruise model of the extended-range hybrid sweeper truck
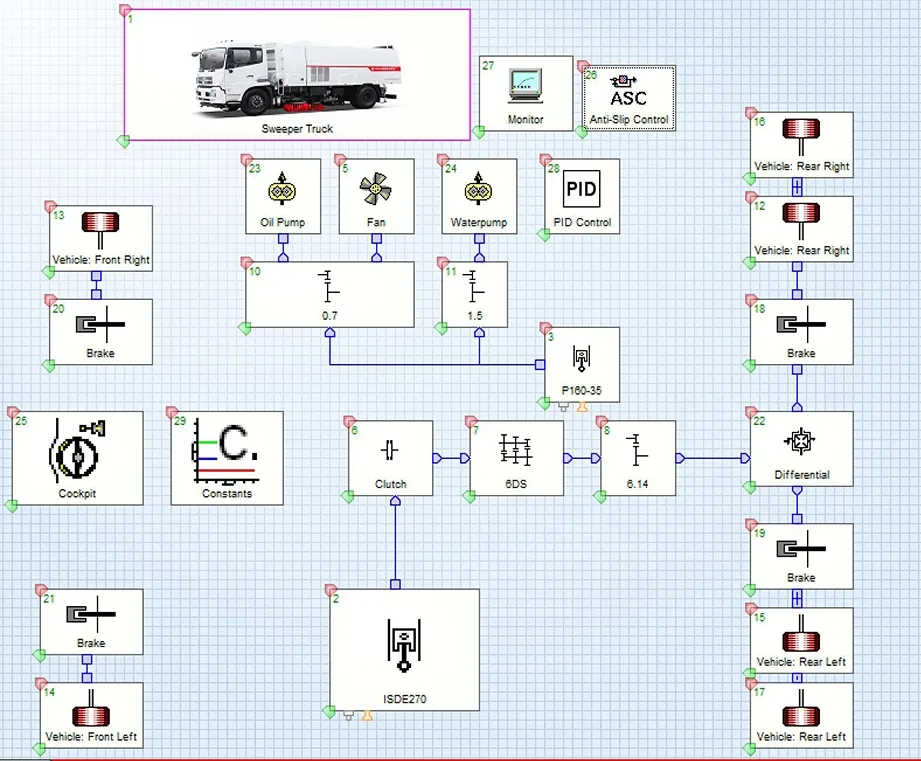
图3 传统双发动机洗扫车Cruise模型Fig.3 Cruise model of the traditional dual-engine sweeper
洗扫车驾驶分为转场和作业工况,为了尽量拟合洗扫车在市区转场的行驶工况,选取中国重型商用车工况路谱图的市区部分作为参考,设置3个循环,如图4所示。选取某地区洗扫车的作业工况作参考,如图5所示。

图4 洗扫车市区转场工况路谱图Fig.4 Road map of the urban transition conditions of the sweeper truck
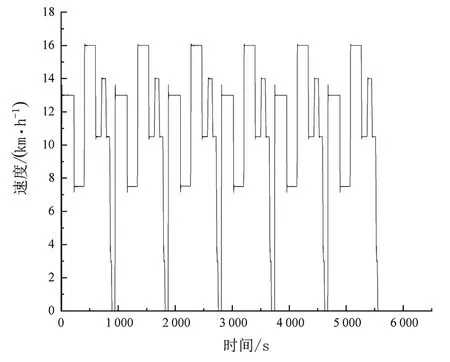
图5 洗扫车作业工况路谱图Fig.5 Road map of the operating conditions of the sweeper truck
市区转场工况的行驶车速仿真如图6所示,可以看到实际车速与目标车速基本拟合,说明车辆行驶达到预期车速。在转场工况下电池荷电状态如图7所示,本文仿真设置的电池初始荷电状态为50%,根据文献[11]对电池充放电寿命分析,将电池SOC放电下限值设为40%,电池充电上限SOC值设为60%。在车辆行驶过程中,电池给驱动电机提供电能,处于放电状态,车辆为纯电动驱动模式,当SOC值下降到40%时,APU开始工作,此时ISG电机先向外输出正向功率,用于带动发动机启动,发动机向外做工开始发电,给动力电池充电,电池SOC值不断上升,直至60%后不再上升,此时APU停止工作,达到预期控制效果,与所设计的控制策略相符,有效保护电池,避免发生过充或者过放的现象,延长电池使用寿命。在转场工况下,仿真过程中传统洗扫车主发动机输出功率变化区间大,急加速情况下发动机输出功率最高可达160 kW,市区行驶低速区域发动机功率无法得到充分利用,发动机能耗以及排放效果都比较差。增程式洗扫车在市区转场过程中,APU开启后,最高输出功率为50~140 kW,处于一个相对稳定的功率输出区间,造成功率变化主要由于车辆的急加速,带动18 t的洗扫车需求功率较大,但是整体波动还是在发动机运行高效区域,发动机开启时间也比传统洗扫车晚260 s,工作时间更短。
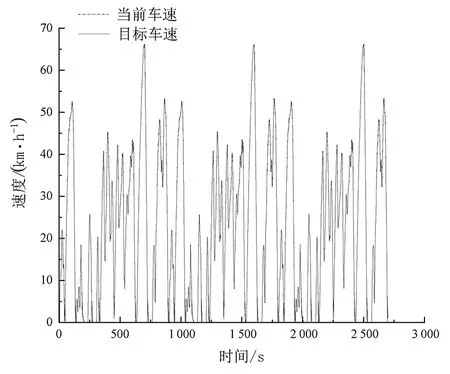
图6 转场工况下车速行驶仿真Fig.6 Simulation of vehicle speed under transition conditions

图7 转场工况下电池SOC值Fig.7 Battery SOC value changesunder transition conditions
作业工况下洗扫车的SOC值变化如图8所示,可以看出,由于作业工况下功率需求较大,此时车速低于20 km/h,电池SOC值在放电293 s后降到40%,APU开启充电状态,过程持续约982 s,电池SOC值达到60%停止充电,APU关闭。整个过程依然在控制策略的控制目标内,控制效果理想。
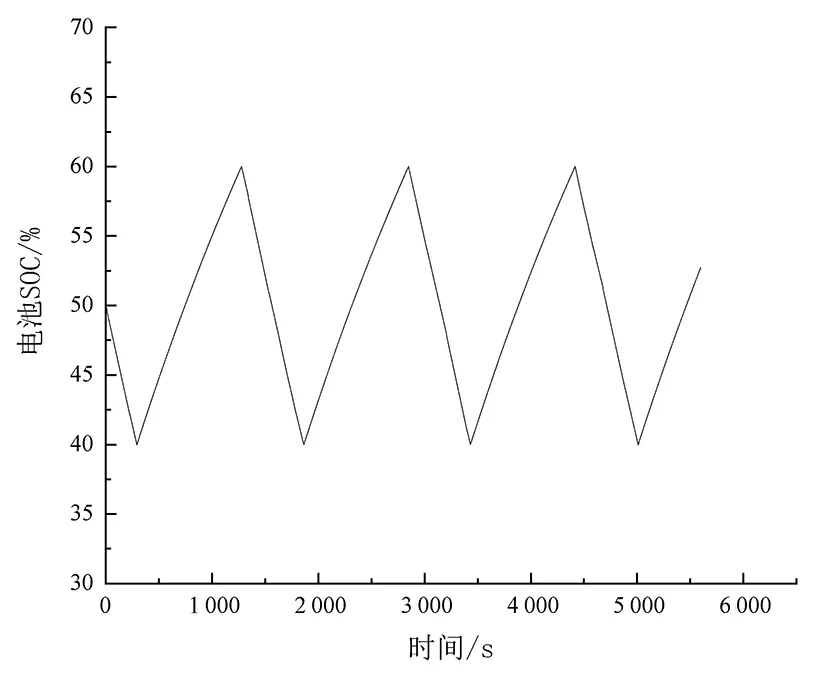
图8 作业工况下电池SOC值Fig.8 Battery SOC value changes under operating conditions
市区转场与作业工况下的油耗如表2所示。根据比亚迪工程师为混合动力汽车制定的等效油耗计算方法,每百公里等效油耗=(起点至终点油耗+起点至终点电耗/3.0) ·100/总里程,对比油耗结果可看出,增程式混合动力洗扫车有更低的油耗表现,此外,增程式混合动力洗扫车在作业工况下还额外为电池充电6.05 kW·h/100 km。

表2 洗扫车燃油消耗情况Tab.2 Fuel consumption of the sweeper truck
4 结论
1)以现有洗扫车为原型,提出增程式混合动力系统的系统结构,对动力系统的驱动电机、辅助动力单元、动力电池等主要参数进行匹配,满足动力性指标和续航要求。
2)通过AVL-Cruise软件建立整车仿真平台,与Matlab/Simulink建立的功率跟随控制策略进行联合仿真,仿真车速与目标车速可较好拟合,在转场和作业工况下都能在电池SOC下降到一定值时APU开启工作,充电达到目标SOC值关闭APU,防止电池过充和过放。
3)建立了传统双发动机洗扫车模型,在同样的运行工况下与增程式混合动力洗扫车对比,增程式洗扫车的发动机开启时间更短并且输出功率相对稳定在高效区间,最终得出增程式混合动力洗扫车在市区转场工况比传统双发动机洗扫车节油51.5%,在作业工况下节油22.2%。
猜你喜欢
汽车工程师(2021年11期)2021-12-21
中学生数理化·七年级数学人教版(2021年10期)2021-11-22
北京第二外国语学院学报(2021年2期)2021-08-13
防爆电机(2021年1期)2021-03-29
魅力中国(2020年34期)2020-12-07
中国设备工程(2020年3期)2020-03-27
故事作文·高年级(2017年10期)2017-10-19
小学阅读指南·低年级版(2016年1期)2016-09-10
筑路机械与施工机械化(2014年8期)2014-03-01
汽车电器(2014年5期)2014-02-28