
基于差分GPS与雷达信标机的舰载雷达校准技术∗
2021-04-06 07:13
舰船电子工程 2021年3期
(海装驻武汉地区第一军事代表室 武汉 430060)
1 引言
为了保证舰载雷达输出距离、方位等信息准确、稳定、可靠,最大限度地消除或减小雷达设备的系统误差,对舰载雷达距离和方位校准是雷达的一个重要项目。因此改进舰载雷达校准方法,提升舰载雷达校准技术显得尤为重要。我们通过开展舰船系统对准技术应用研究,采用差分GPS与雷达信标机组合,形成以差分GPS站点基线方位和距离为基准,雷达信标机延时增距回波应答方式的舰载雷达校准技术,并应用该项技术对多种型号舰载雷达进行校准,取得了较好的效果。
2 原理与方法
2.1 校准原理
舰载雷达的校准主要包括雷达方位和距离等参数。为了实现舰载雷达方位和距离的校准,采用2台具有实时数据接收功能的GPS组成差分GPS与雷达信标机组成舰载雷达校准装置。其中一台GPS架设在雷达信标机天线上作为基站,放置在距被校雷达足够远、且稳定性好、没有遮挡的地方,另一台GPS架设在被校雷达天线附近的舰船艏艉线控制点上作为测站,以此替代被校雷达的位置。差分GPS基站和测站实时采集在WGS-84坐标系下的经纬度,经坐标转换及解算得到基站和测站的三维坐标。在RTK模式下基站通过数据链将其观测值和坐标信息传递给测站,测站不仅通过数据链接收来自基站GPS的数据,还要将测站GPS采集观测数据纳入系统内组成差分观测值进行实时处理,计算得到基站和测站间的距离和方位值。雷达信标机通过天线接收来自被校雷达发射的脉冲信号,经内部模块单元变频网络对接收信号进行变频,将变频后的信号送入延迟与多普勒调制单元,运用目标回波多普勒频移,模拟距离零多普勒或附加多普勒回波信号,在雷达发射信号检波脉冲的同步下采用时延值顺序读取数字射频存储器存储的相应的脉冲信号,精确模拟对应于扩展距离时延值的假目标回波。
雷达信标机采用延时回波应答方式,提供由差分GPS基线方位θ0、距离R01以及延时距离R02目标的回波信号,被校雷达实时接受雷达信标机天线回波信号,得到雷达与目标之间的方位θ方位和距离L距离,校准原理见图1。
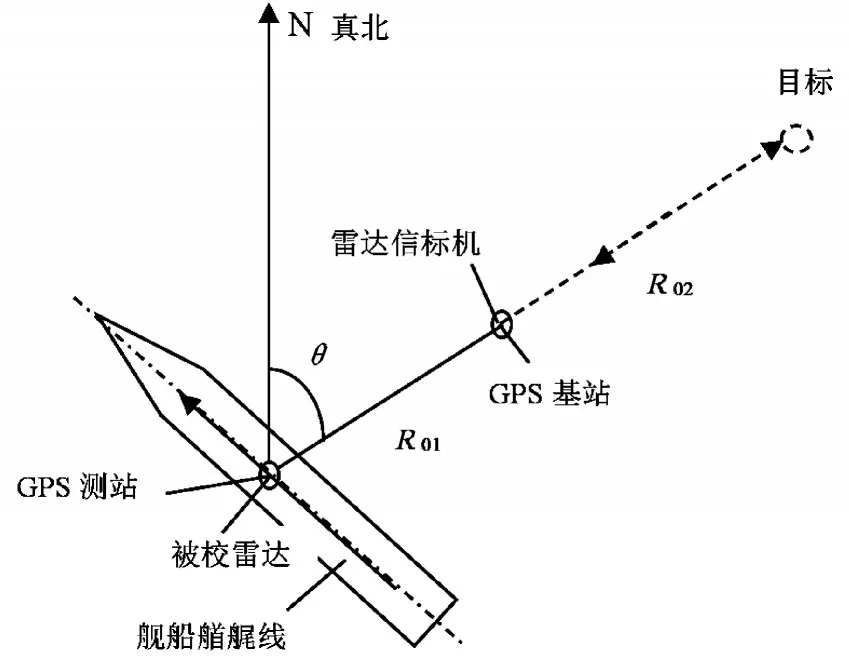
图1 校准原理
图中:R01为差分GPS基线距离;R02为雷达信标机延时距离;θ0为差分GPS基线方位。
根据GJB 403A-1998《舰载雷达通用规范》标准要求,在规定条件下对被校雷达方位或距离校准采集多组数据,记录校准数据。将被校雷达显示方位和距离数据与差分GPS基线方位、距离以及雷达信标机延时距离基准进行比较,计算得到各组被校雷达距离误差与误差均方根值,方位误差与误差均方根值。各组距离和方位误差不能超出规定要求,距离和方位误差均方根值为校准结果。
距离误差为 ΔL=L距离-(R01+R02);方位误差为 Δθ=θ方位-θ0。
2.2 归心修正
由于雷达信标机架设位置离被校雷达距离较近,而差分GPS[1]测站无法架设在被校雷达标志位置,校准过程中以差分GPS测站点替代被校雷达位置产生偏距误差。为了保证校准结果的准确性,需对差分GPS测站点替代被校雷达位置产生偏距误差进行归心修正[2]。现以差分GPS基站和雷达信标机在被校雷达在舰船的右舷,差分GPS测站在偏舰艏方向如图2所示[3]。其中舰船航向角由导航系统实时给出,归心修正计算如下。
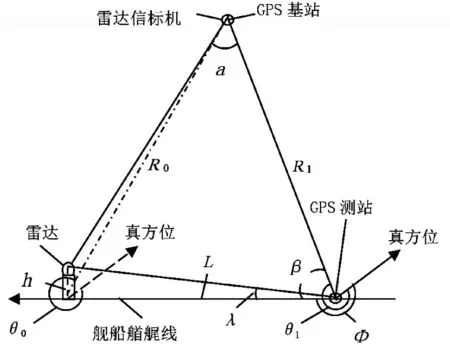
图2 归心修正
图中:θ1为GPS测量方位;R1为GPS测量距离;L为测站到被校雷达的平距;Φ为航向角;θ0为雷达方位;R0为雷达到GPS基站的距离;h为雷达天线与GPS测站高度差;a为差分GPS基站和测站与基站和雷达位置的夹角。
舰船雷达校准时,受舰船系泊状态、航向角、差分GPS基站、测站架设和被校雷达位置等因素影响,归纳起来差分GPS测站与舰载雷达标志中心不一致归心修正分四种形式,计算方式见表1。
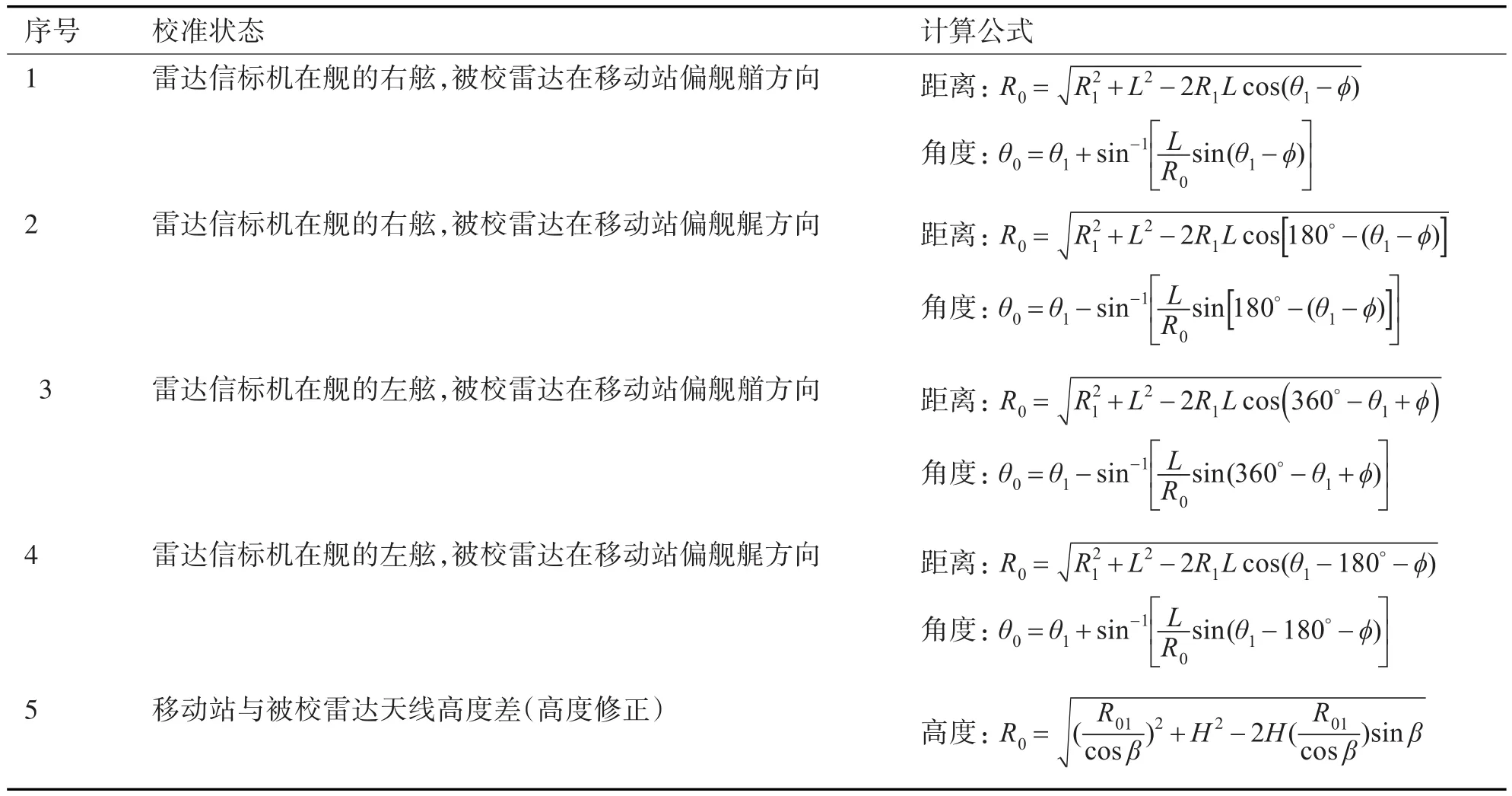
表1 舰船雷达校准归心修正计算公式
2.3 校准方法
将雷达信标机放置在距被校雷达2km的地方,差分GPS基站架设在雷达信标机天线上方,差分GPS测站架设在被校雷达的舰船甲板艏艉线标识上,调整或设置仪器参数,差分GPS基站和测站采集在WGS-84坐标系下的经纬度,经坐标变换及解算得到基站与测站间的基线方位θ和距离R[4~5]。按照归心修正方法,对差分GPS测站与被校准雷达位置不一致产生的偏距误差进行修正,得到基线方位θ0和距离R01。被校雷达开机至工作稳定正常,调整雷达信标机天线位置使被校雷达天线在观察视窗中。设置雷达信标机脉宽、频宽、衰减延时距离等参数,计算得到被校雷达天线与雷达信标机假目标回波距离R02。调整被校雷达参数,使被校雷达在半径为R01+R02的距离范围搜索并对准目标。当被校雷达和雷达信标机工作均处于稳定状态,同时记录差分GPS基线方位和距离数据、雷达信标机延时距离、被校雷达的显示距离和方位、舰船导航系统的航向角数据。按照GJB 403A-1998《舰载雷达通用规范》标准要求采集多组数据,数据采集完毕,对每组测量数据进行分析和处理,计算得到各组被校雷达距离误差ΔL与误差均方根,方位误差Δθ与误差均方根。任一组雷达距离误差ΔL和方位误差Δθ均应满足规定要求,以雷达距离或方位误差均方根值作为校准结果。如被校雷达距离或方位误差超出规定要求,对被校雷达参数进行修改,调整完成后再进行校准使其满足规定要求。
3 校准应用
常规校准方法在一些位置不具备校准条件的地方,不仅影响舰船的建造周期,而且增加海试任务及舰船交付的不确定因素[6]。为了保证舰船作战系统信息准确一致,确保舰船产品的建造质量,我们开展了舰船系统对准技术应用研究专项科研,采用差分GPS与雷达信标机组成校准装置[7~8],设计编制包括归心修正计算在内的校准数据采集、分析和处理软件,形成舰载雷达距离和方位校准技术,并对多艘舰船的舰载雷达进行校准[9~10]。现以×型雷达距离和方位校准为例,该舰在码头处于系泊状态,将差分GPS基站和雷达信标机假架设在码头对岸大约1.5km能够通视的地方,基站位于舰艇右舷方向,差分GPS测站架设在舰艇艉部甲板艏艉线标志点上,用全站仪架设在差分GPS测站点的位置对被校雷达测量,计算得到差分GPS测站与被校雷达天线标志位置平距48.505m,高度差7.287m,对该距离和高度差引起的偏距误差进行修正。
由于舰船处于动态,差分GPS基站和测站基线距离在 1.4427km,方位角 279.5950°,仰角 0.1190°左右波动,航向由舰船导航系统给出,航向角为154.1°。按照前述校准方法,采集20组数据,计算得到每组校准结果。
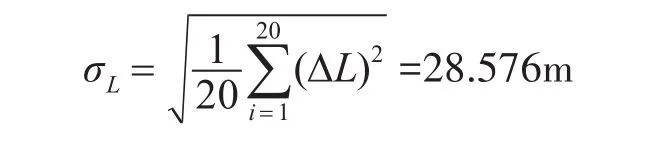
距离误差均方根值:
方位误差均方根值:
被校雷达距离误差在25.10mm~28.61mm范围,距离误差均值28.576mm。方位误差在-0.03°~0.07°范围,方位误差均值为0.01°。
4 不确定度分析评定
采用差分GPS与雷达信标机校准舰船雷达方位和距离,测量结果扩展不确定度[11]与舰船雷达方位和距离最大允许误差的绝对值(MPEV)应满足下式要求[12]:

如果雷达方位最大允许误差≤0.2°,距离最大允许误差≤5m,目标不确定度为

4.1 雷达距离校准不确定度分析评定
4.1.1 雷达信标机延迟距离引起不度分量u1
雷达信标机接收雷达脉冲信号并进行延迟,生成模拟目标,并发送延迟信号,根据雷达信标机技术指标,延迟距离最大允许误差为±1.00m,均匀分布k=,由此引起的不确定度分量u1:

4.1.2 GPS定位误差引起的不确定度分量u2
按照GPS定位系统技术指标,平面误差±20mm+1mm/km,高程误差±40mm+1mm/km,进行雷达距离测量时差分GPS位置的高度变化不大,差分GPS基站和测站的距离不大于2km,均匀分布k=,由此引起的不确定度u2:

4.1.3 甲板上GPS架设位置引起的不确定度分量u3
甲板中线上架设GPS相距雷达馈源位置的距离测量误差在±0.20m,均匀分布k=,由此引起的不确定度分量u3:
4.1.4 船体的晃动引起的不确定度分量u4
在系泊试验阶段,船体在水面上的晃动对测量精度引起的误差是不可避免的,在测量过程中,由于船体的晃动引起的测量误差为±0.50m,均与分布k=,由此引起不确定度分量u4:
4.1.5 读数同步性引起的不确定分量u5
在测量过程中,在船体甲板、操作室以及岸边的操作人员要同时读数,由于读数的不同步而引起的测量误差为±0.50m,均与分布k=,由此引起的不确定分量u5:

4.1.6 合成标准不确定度

4.1.7 扩展不确定度

4.2 雷达方位校准不确定分析评定
4.2.1 GPS基站方位误差引起的不确定度分量u1
雷达方位校准时GPS基准站架设在任意位置,需通过WGS84坐标进行解算获得相关信息,由于GPS接收信息的准确性使其输出方位角误差±0.005°,均匀分布k=,由此引起的不确定分量u1:
4.2.2 GPS移动站架设误差引起的不确定度分量u2
GPS移动站采用当地坐标系进行数据链的传输、解算和处理信息,当GPS移动站架设在舰艇甲板中线上与舰艇坐标系不一致产生方位角误差±0.005°,均匀分布k=,由此引起的不确定分量u2:

4.2.3 船体稳定性引起的不确定度分量u3
雷达方位校准在码头系泊状态下进行,由于舰艇在水面晃动影响输出信息稳定性,导致读数的不同步而引起方位角误差±0.002°,均匀分布k=,由此引起的不确定分量u3:
4.2.4 GPS数显量化误差引起的不确定分量u4
差分GPS计算方位角时的分辨率0.001°,量化误差为分辨率,均匀分布k=,由此引起的不确定分量u4:
4.2.5 合成标准不确定度

4.2.6 扩展不确定度

5 结语
本文在分析采用差分GPS与雷达信标机校准舰载雷达距离和方位原理和方法基础上,分析差分GPS测站架设位置与被校雷达位置不一致引起的偏心误差,推导出差分GPS测站替代被校雷达位置产生偏距误差的归心修正计算方式,分析和评定差分GPS与雷达信标机校准舰载雷达距离和方位测量结果不确定度[13]。通过对舰载雷达距离和方位校准,搜索雷达距离误差为28.576m,方位误差0.01°,雷达距离校准测量不确定度1.5m,方位校准测量不确定度0.01°,确保舰载雷达校准质量,极大地提升了舰载雷达距离和方位校准结果的准确性和可靠性,是一种舰载雷达距离和方位校准新技术,有广泛的应用价值和发展前景。
猜你喜欢
上海师范大学学报·自然科学版(2022年3期)2022-07-11
测绘地理信息(2022年2期)2022-04-02
全球定位系统(2021年2期)2021-05-24
华东师范大学学报(自然科学版)(2020年1期)2020-03-16
上海师范大学学报·自然科学版(2018年3期)2018-05-14
计算机应用(2016年10期)2017-05-12
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
阅读(中年级)(2009年4期)2009-04-16
