某电动车后轮转向系统控制策略开发研究
2021-04-05 09:25汤敏郝文权禹真
汽车文摘 2021年4期
汤敏 郝文权 禹真
(1.中国第一汽车股份有限公司 研发总院,长春130013;2.汽车振动噪声与安全控制综合技术国家重点实验室,长春130013)
主题词:后轮转向 控制策略 双参前馈控制 电动汽车
0 前言
近年来,随着汽车技术的发展,很多汽车厂商推出了四轮转向车辆。四轮转向系统的主要作用是低速转向时减小车辆的转弯半径,提升低速转向机动性和轻便性,高速转向时使车辆基本保持质心侧偏角为零,大大提升车辆对方向盘转角输入的动态响应特性和操稳性能[1]。
1983 年Sato 教授等人提出了横摆角速度反馈控制策略,可以较好地改善车辆转向特性,并具有良好的抗干扰性[2]。
1986 年Sano 教授等人提出了基于车速的前后轮转角比为定值的后轮转向前馈控制策略,可减小车辆低速行驶的转弯半径,减小高速行驶的质心侧偏角,提高操纵稳定性[3]。
Furukawa 教授等人提出了前后轮转角比是方向盘转角函数的后轮转向控制策略,试验结果表明,该策略能够解决轮胎非线性导致的横摆角速度增益恶化的问题[4]。
Fukanaga 等人设计了具有一阶滞后的后轮转向控制策略,该策略可以在改善车辆稳定性的同时,不延长横摆角速度和侧向加速度的响应时间[5]。
此外,基于现代控制理论的最优控制、模糊控制、鲁棒控制等控制方法也在后轮转向开发中有很多研究成果。
本文提出双参前馈后轮转向控制策略,并以某电动车为载体进行研究,创建四轮转向线性二自由度车辆模型,以及基于CarSim 与MATLAB/Simulink的联合仿真模型,将所提出的双参前馈后轮转向控制策略与前馈比例控制策略、前馈比例加横摆角速度反馈控制策略进行对比分析,证明了控制模型的正确性与优越性。
1 主动后轮转向控制机理
低速转向时,四轮转向车辆的后轮产生与前轮转动方向相反的转角,由图1所示的车辆Ackerman转向特性,可见四轮转向相比于前轮转向可以明显减小车辆的转弯半径,提高低速转向的机动性和轻便性,在城市交通中驾驶更容易。四轮转向技术使大型车辆具有如同小型车的操纵和泊车便捷性[6-7]。
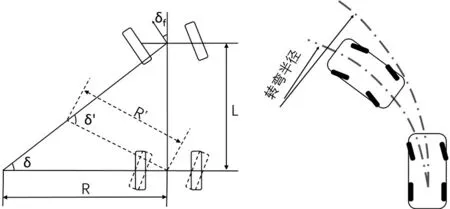
图1 车辆Ackerman转向原理[8-9]
高速转向时,传统前轮转向车辆的前进方向与其纵向中心线存在夹角,即质心侧偏角,四轮转向的目标是使车辆质心侧偏角为零,有效消除或降低车辆侧滑事故的发生几率,明显改善车辆高速转向的动态响应和稳定性,减轻驾驶员高速驾车的疲劳感。图2对比了前轮转向车辆和四轮转向车辆的高速稳定性差异,四轮转向车辆具有更好的转向稳定性[10-12]。
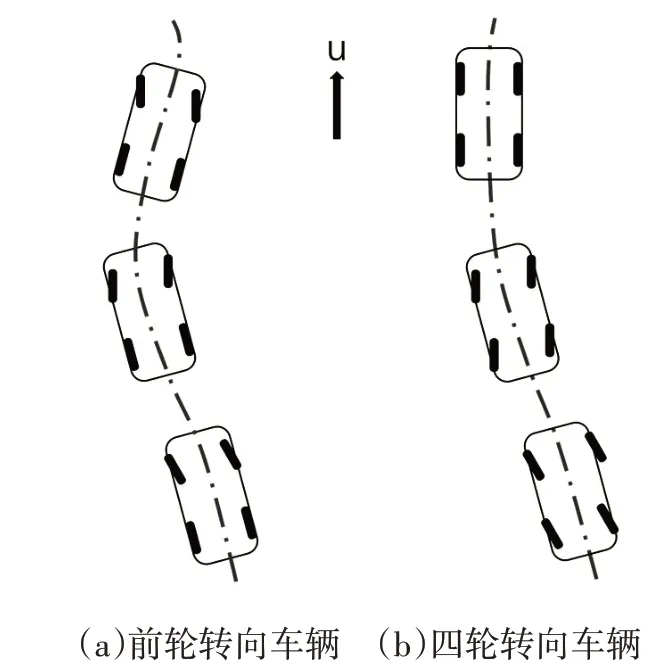
图2 四轮转向提升高速稳定性[9]
2 车辆动力学模型
2.1 2自由度(2DOF)简化车辆模型
当车辆侧向加速度在0.4 g以内时,轮胎侧偏特性处于线性范围内,可将车辆简化成一个线性2自由度的2轮摩托车模型[13]。模型由2个有侧向弹性的轮胎支撑地面,具有侧向和横摆两个运动自由度[14],如图3所示。

图3 四轮转向车辆的2DOF车辆模型
图中,β为质心侧偏角,ωr为横摆角速度,u为质心前进速度,υ为质心侧向速度,a、b分别为前、后轴到质心的距离,L为轴距,δf、δr分别为前、后轮的转角,αf、αr分别为前、后轮的轮胎侧偏角。
根据车辆的力、力矩平衡关系,可求得二自由度车辆运动微分方程[15]:

式中,m为整车质量,k1、k2分别为前、后轴的侧偏刚度,Iz为横摆转动惯量,质心侧偏角
式(1)转化成状态空间表达式为:

式中,

取状态向量X=(β ωr)T,输入向量U=(δf δr)T,输出向量Y=(β ωr)T。
2.2 CarSim复杂车辆模型
以后轮转向系统为研究对象,建立某电动车样车整车CarSim 模型,在转向系统模块中激活后转向系统,并给定后齿条与左右后轮转向角的关系,如图4所示。
在后轮转向控制算法模型部分中,将前左轮转角Steer_L1、前右轮转角Steer_R1、横摆角速度AVz、车速Vx 选定为CarSim 整车模型的输出通道,即控制策略模型的输入;将后左轮转角IMP_STEER_L2、后右轮转角IMP_STEER_R2 选定为CarSim 整车模型的输入通道,即控制策略模型的输出。通过Send to Simulink将CarSim 整车模型与MATLAB/Simulink 搭建的控制策略模型形成闭环控制系统进行仿真分析。
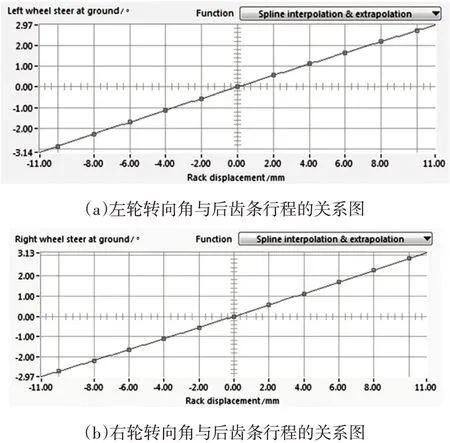
图4 左右后轮转向角与后齿条行程的关系
3 后轮转向系统控制策略
3.1 前馈比例控制
车辆转向行驶时,质心侧偏角越小则轮胎侧滑的趋势越小,操纵稳定性越好[16]。为提高车辆的循迹能力和稳定性,四轮转向的控制目标是使车辆稳态转向质心侧偏角为零[17]。Sano教授等用线性二自由度模型推导出车辆稳态转向质心侧偏角为零时前、后轮转角的关系有如下关系式[3]:
该前馈比例控制策略的比例系数k与车速的关系如图5 所示:低速时k值为负,即前后轮反向转动,减小转弯半径,提高转向灵活性;高速时k值为正,即前后轮同向转动,提高车辆的稳定性[18]。
3.2 前馈比例加横摆角速度反馈控制
为提高车辆的抗干扰稳定性,在前馈比例控制策略的基础上加上横摆角速度反馈[19-20]。为使横摆角速度ωr跟踪理想值ωrd,在控制策略中引入横摆角速度偏差,即理想横摆角速度与实际横摆角速度的差值e[21]。
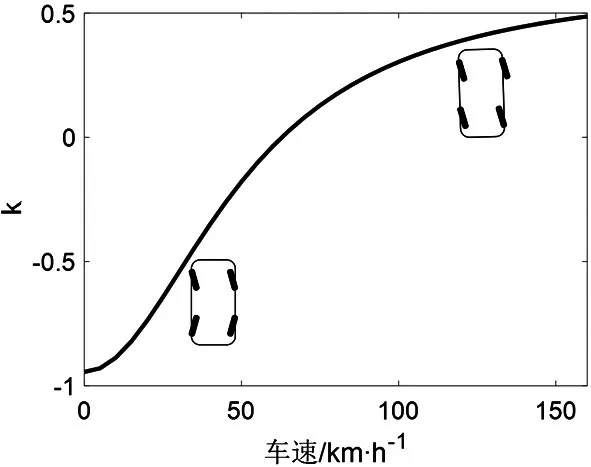
图5 前馈比例控制比例系数k与车速的关系
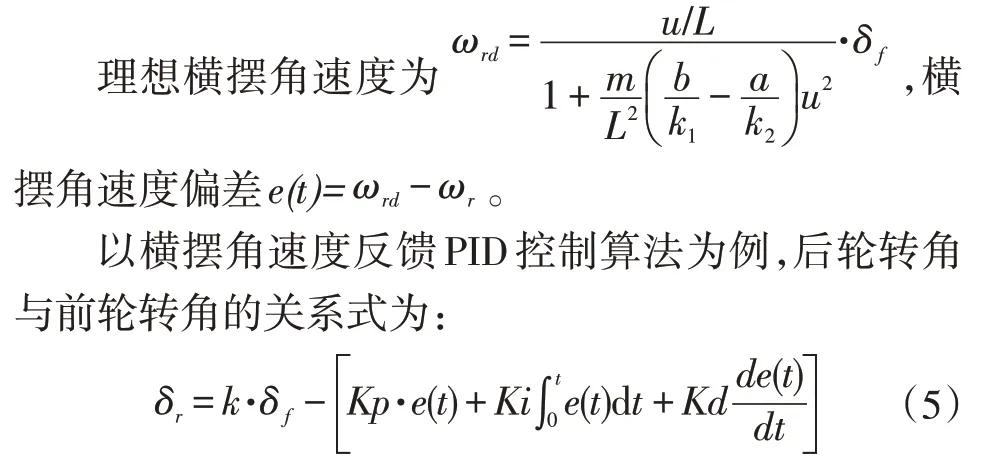
在车辆转向时,此算法可以保持驾驶员具有同前轮转向相同的转向感觉,并实现质心侧偏角为零。这样可以降低驾驶员的疲劳感,且提升操纵稳定性[22]。
3.3 双参前馈后轮转向控制
为使高速转向时车辆的质心侧偏角快速、较小超调的控制到零,并且不降低整体的车辆响应,需要后轮相对前轮先反向转动,再同向转动,这样可以补偿后轮与前轮同向转动所导致的横摆响应下降。提出以质心侧偏角和横摆角速度2个参数为控制目标的双参前馈控制策略。
令质心侧偏角及质心侧偏角速度为零,可推导出后轮转角与前轮转角的关系式如下:
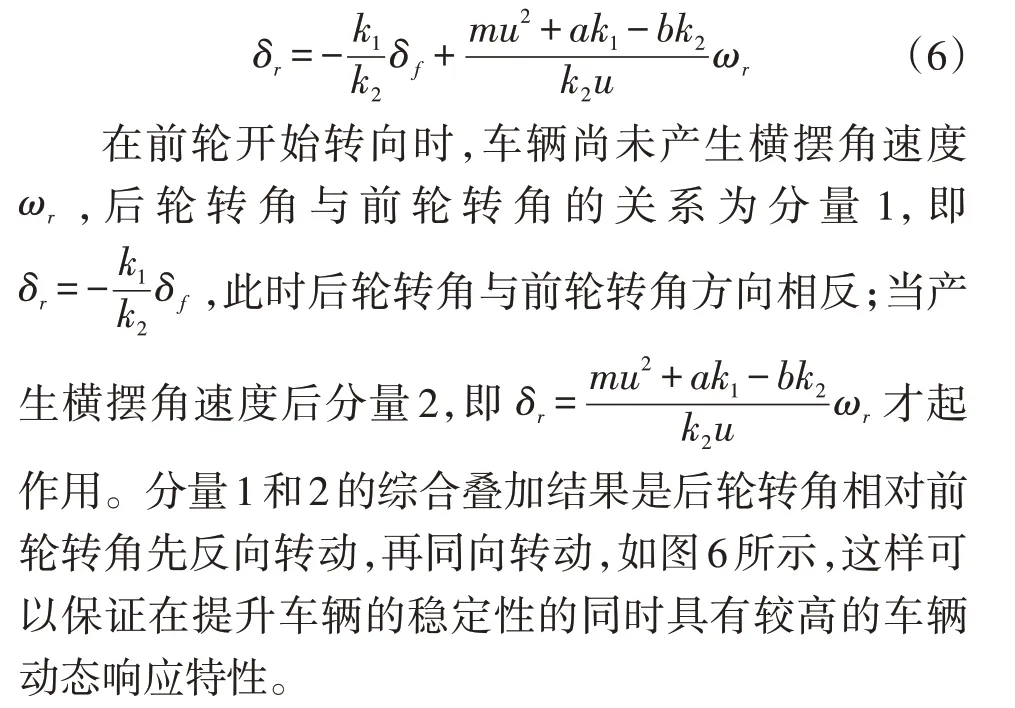
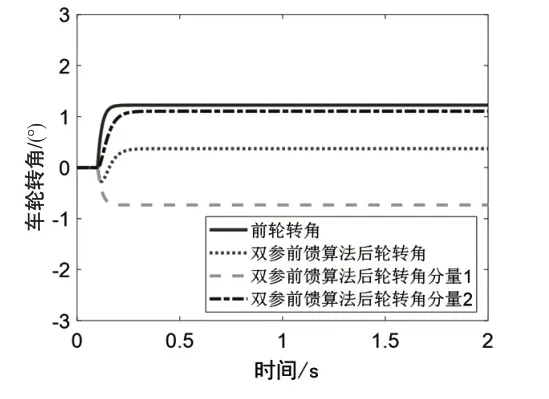
图6 双参前馈控制算法的车轮转角

图7 3种控制策略模型
4 不同控制算法对比
4.1 2DOF车辆模型不同控制策略对比
在MATLAB/Simulink 中搭建3 种控制策略的对比分析模型和2DOF车辆模型如图7所示。其中车辆模型1 为仅前轮转向车辆,车辆模型2 为前馈比例控制的车辆,车辆模型3为前馈比例加横摆角速度反馈控制的车辆,车辆模型4为双参前馈后轮转向控制的车辆。
4.1.1 低速转向控制效果对比
车辆以20 km/h 的车速前进,方向盘在0.1 s 内从0°到90°阶跃转向,仅前轮转向和后轮转向3种控制策略下车辆的车轮转角、质心侧偏角和横摆角速度响应对比如图8~10所示。
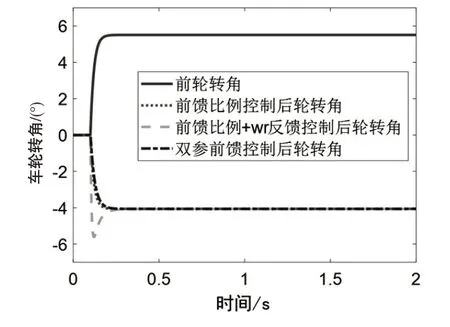
图8 简化车辆模型低速时后轮转角对比
分析结果可知,低速转向时3 种控制算法均使车辆质心侧偏角控制到零;且横摆角速度均比前轮转向时大,转向更加灵活,转弯半径更小。
4.1.2 高速转向控制效果对比
选取典型工况对比分析不同后轮转向控制策略的高速转向控制效果。车辆以100 km/h的车速前进,方向盘在0.1 s 内从0°到20°阶跃转向,仅前轮转向和后轮转向3种控制策略下车辆的车轮转角、质心侧偏角和横摆角速度响应对比如图11~13所示。
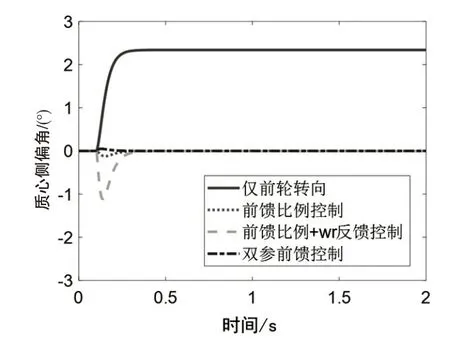
图9 简化车辆模型低速时质心侧偏角对比
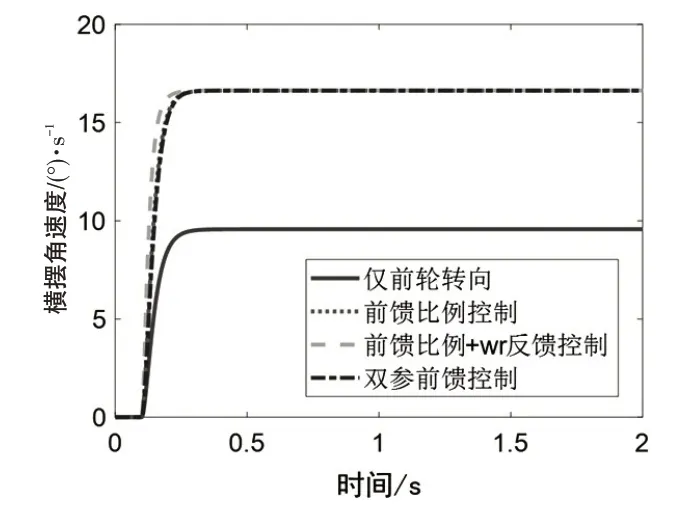
图10 简化车辆模型低速时横摆角速度对比
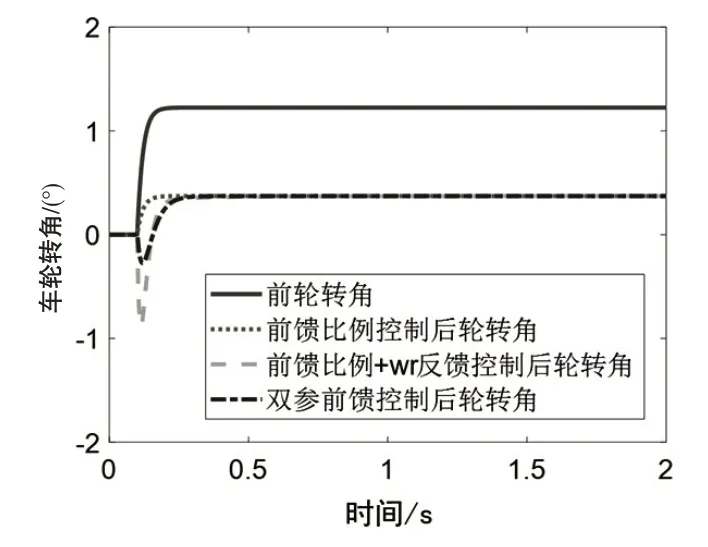
图11 简化车辆模型高速时后轮转角对比

图12 简化车辆模型高速时质心侧偏角对比
分析结果可见,高速阶跃转向时,仅前轮转向的车辆稳态质心侧偏角不为零,3 种后轮转向控制策略车辆最终稳态质心侧偏角均能控制到零,四轮转向控制车辆的转向循迹性能大大提升。3种控制策略的稳态横摆角速度均小于前轮转向车辆,降低转向灵敏度、提升稳定性。
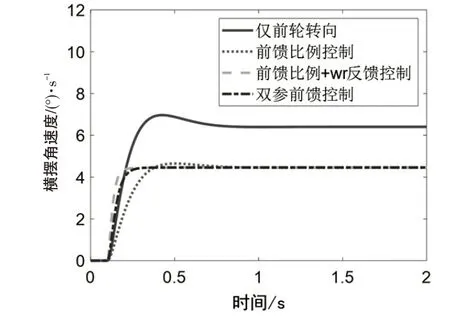
图13 简化车辆模型高速时横摆角速度对比
3种算法对比可见,前馈比例控制车辆后轮转角与前轮转角方向相同,前馈比例加横摆角速度反馈控制和双参前馈控制2种算法的后轮相对前轮转角均是先反向,再同向转动,初始阶段的后轮反向转角可明显提升车辆的动态响应,之后的同向转角提升车辆的稳定性,这样在提升车辆稳定性的同时可以保证整个过程响应特性。
3 种算法中,前馈比例控制会延长横摆角速度达到稳定的时间、横摆超调明显,前馈比例加横摆角速度反馈控制和双参前馈控制均可实现较快的横摆响应、较小的横摆超调。其中双参前馈控制可以迅速、几乎无超调的实现质心侧偏角为零的目标,在提升车辆动态响应的同时大大提升车辆的稳定性。
4.2 CarSim车辆模型不同控制策略对比
2DOF 线性车辆模型做了简化,为模拟实际车辆控制效果,搭建CarSim 车辆模型和3 种控制策略的Simulink 算法模型并进行联合仿真,如图14 所示,可对3种控制算法和仅前轮转向车辆的转向特性进行对比分析。
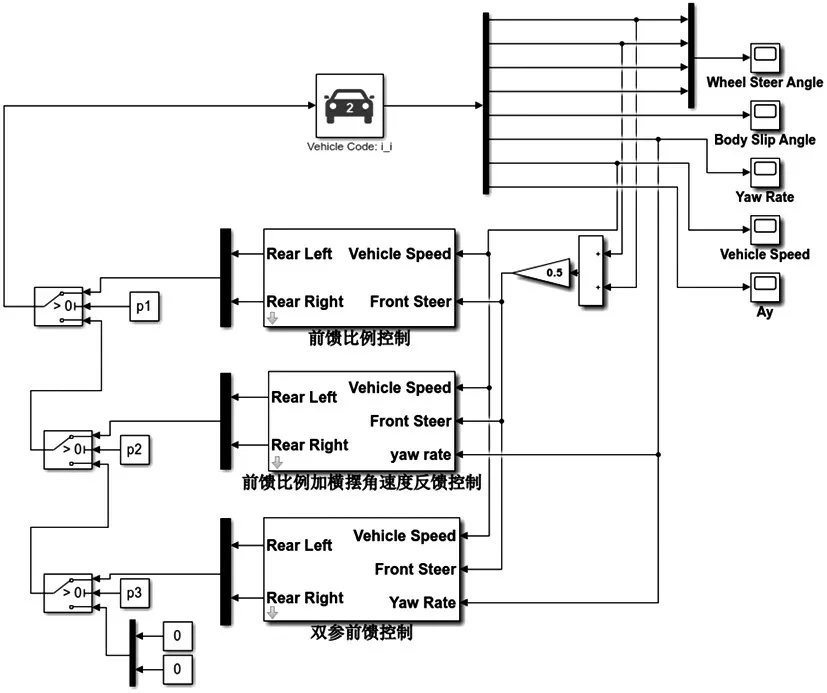
图14 3种控制策略与CarSim整车模型联合仿真
基于CarSim的联合仿真与基于线性2DOF简化模型的分析结果趋势一致,说明了CarSim联合仿真模型与线性2DOF简化模型的一致性较好。与前轮转向车辆相比,四轮转向车辆在低速时提高了转向机动性,如图15~16所示,高速时增加稳定性、提高循迹能力,如图17~18所示。

图15 复杂车辆模型低速时质心侧偏角对比
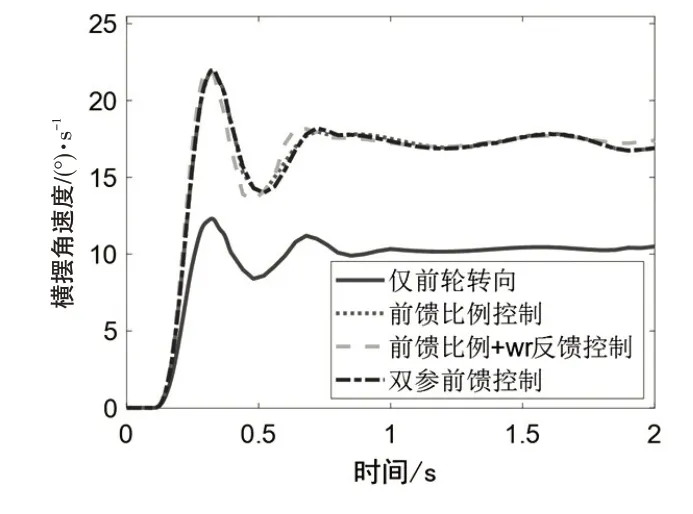
图16 复杂车辆模型低速时横摆角速度对比

图17 复杂车辆模型高速时质心侧偏角对比

图18 复杂车辆模型高速时横摆角速度对比
5 结束语
本文基于某电动车平台以零质心侧偏角为目标开发了后轮转向双参前馈控制策略,通过简化线性2DOF 模型和复杂车辆联仿模型仿真分析,对比分析前馈比例控制、前馈比例加横摆角速度反馈控制、双参前馈后轮转向控制3 种控制策略的优缺点。结果表明,双参前馈后轮转向控制策略在车辆低速转向时可以明显降低转弯半径,提升车辆机动性;高速转向时可以迅速、较小超调的控制车辆质心侧偏角零,提高高速转向时的操纵稳定性能,证明了该算法的优越性。
本文通过仿真手段对不同后轮转向控制算法进行了对比研究,但实际车辆与仿真模型存在一定的差异性,因此下一步需要对后轮转向控制系统进行实车标定和调试,并在实车上进一步对控制算法进行对比分析。此外,随着底盘各类动力学电控系统的逐渐成熟,尤其是智能汽车的迅速发展,后轮转向控制系统与其它电控系统之间的协调控制问题也是未来的研究热点。
猜你喜欢
汽车维护与修理(2022年5期)2022-09-06
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年14期)2022-07-30
汽车与驾驶维修(维修版)(2021年10期)2021-11-05
小学生学习指导·爆笑校园(2019年6期)2019-09-10
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
中学课程辅导·教师通讯(2018年10期)2018-09-04
发明与创新·中学生(2017年7期)2017-07-10
中学生数理化·高一版(2017年3期)2017-07-08