
电动自行车不安全骑行决策行为建模
2021-04-02 04:33董春娇薛维洋诸葛承祥
北京交通大学学报 2021年1期
董春娇,薛维洋,谢 坤,诸葛承祥
(1. 北京交通大学 a.综合交通运输大数据应用技术交通运输行业重点实验室,b.交通运输国家级实验教学示范中心, 北京 100044; 2. 卡尔斯鲁厄理工学院 交通运输学系, 卡尔斯鲁厄 76131;3. 香港理工大学 土地测量及地理资讯学系, 香港 999077)
电动自行车在提供高效、快速、便捷出行服务的同时,也给交通管理者和其他道路使用者带来了挑战和困扰.电动自行车噪声小,速度快,骑行者素质参差不齐,安全意识较低,存在多种不安全骑行行为,造成电动自行车和其他交通方式混行严重,扰乱了交通秩序,降低了交通系统的效率性.由统计数据可知,2013年到2017年,由电动自行车造成的致人伤亡事故5.62万起,共造成8431人死亡,6.35万人受伤,直接财产损失1.11亿元[1].
近年来交通领域的研究学者开始关注电动自行车问题,逐步开展相关方面的研究.覃国峰等[2]建立了结构方程模型研究电动自行车骑行者的不安全骑行行为.不安全骑行行为主要受交通安全态度的影响,而安全态度则受骑行常识和危险感知的影响.潘晓东等[3]设计了非机动车骑行性能试验装置,发现电动自行车安全性较差.王涛等[4]编制了不安全骑行行为量表,研究电动自行车不安全骑行行为结构.性别、年龄、受教育程度、骑行经验和使用频率会影响电动自行车骑行的危险感知和安全态度.Wang等[5]利用树形的机器学习方法分析了电动自行车骑行者的风险模式.在辨识高风险的电动自行车骑行者过程中,与时间和空间相关的违法特征比违法惩罚相关的特征有效.王卫杰等[6]以电动自行车骑行者伤害程度作为因变量,路段信息、事故信息、电动自行车骑行者信息、机动车辆信息等作为自变量,采用Logistic回归模型,辨识出12个对电动自行车骑行者伤害程度有显著影响的因素.Schepers等[7]通过荷兰急救部门的数据,对比分析了常规自行车和最大速度为25km/h的电动自行车的安全性.电动自行车比常规自行车更易发生交通事故.Du等[8]发现电动自行车骑行者在交叉口内发生交通违法行为的概率更高.Wu等[9-10]研究表明相比于常规自行车,电动自行车骑行者闯红灯的比例和概率更高.
由上述分析可知,在电动自行车出行特性和骑行决策行为建模方面,缺乏对占用机动车道骑行、在机动车之间穿插骑行和逆向骑行等不安全骑行决策行为形成原因的探讨.本文作者针对此3种电动自行车不安全骑行决策行为,建立基于Logistic回归的电动自行车不安全骑行决策行为模型,揭示电动自行车不安全骑行决策行为的生成机理.研究结果有助于交通管理及设计部门掌握电动自行车骑行者决策行为特征,从而制定出具有针对性的交通基础设施布局改进方案以及电动自行车管理措施.
1 电动自行车不安全骑行行为特性
为了掌握电动自行车占用机动车道骑行、在机动车之间穿插骑行和逆向骑行行为特性,以深圳市福田区为研究对象,开展问卷调查.在福田区街道办事处的协助下于2019年1月发放调查问卷1 200份,回收试卷1 009份,有效回收率为84.08%.电动自行车骑行者个人属性调查结果如表1所示.由表1可知,电动自行车骑行者中男性多于女性;年龄以中青年为主,20岁至40岁的骑行者占比为73.91%;职业以全职员工为主,占比为55.66%;学历以中专、高中、大专和本科为主,占比81.10%;家庭年收入以10万元以下为主,占比为63.67%.由调查结果可知,样本的分布符合总体分布特征,问卷数据质量较好.
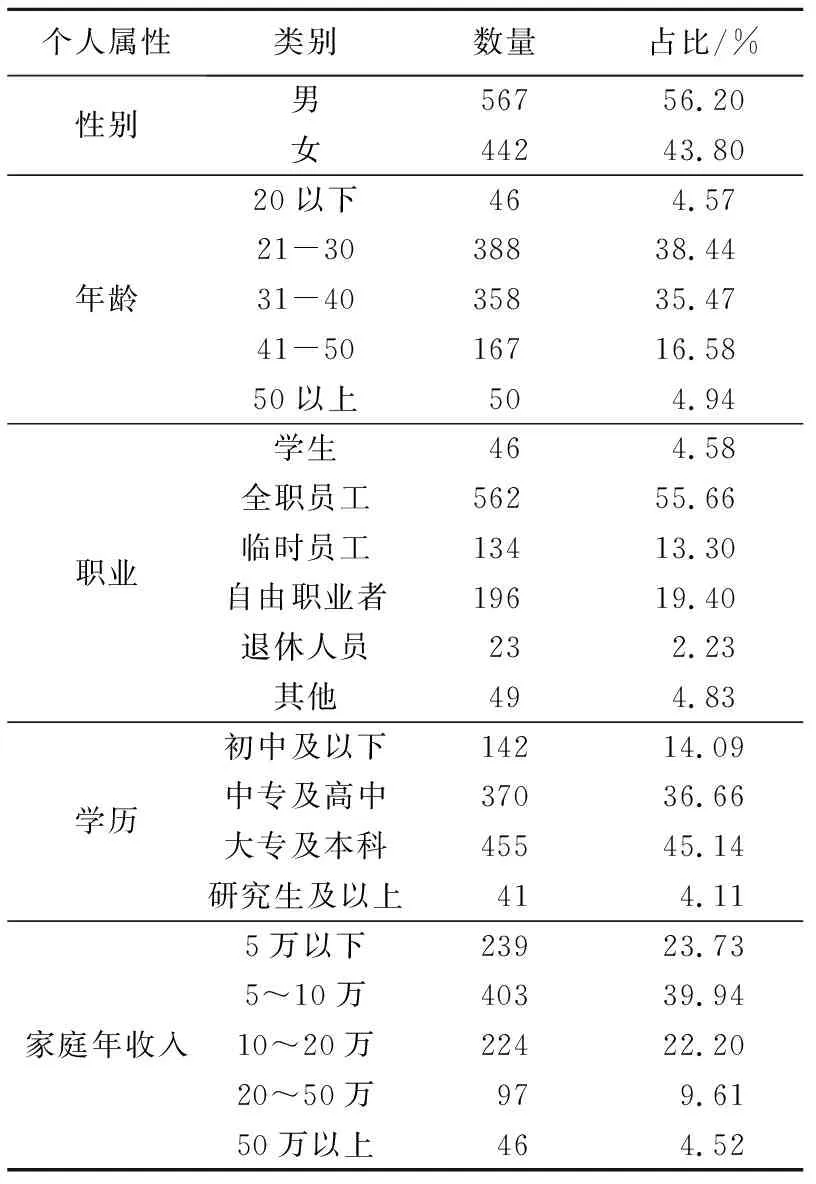
表1 电动自行车骑行者个人属性调查结果
结合调查数据分析电动自行车骑行者不安全骑行行为,结果如图1所示.由图1可知,3种不安全骑行行为占比由高到低为:占用机动车道骑行,在机动车之间穿插骑行和逆向骑行.

图1 电动自行车不安全骑行行为频次调查结果Fig.1 Survey results for unsafe riding frequencies on electric bicycles
电动自行车占用机动车道骑行和穿插骑行决策行为的调查结果如图2所示.调查结果表明骑行环境是电动自行车骑行者决定是否占用机动车道骑行和穿插骑行的主要因素.非机动车道缺乏,不连续,不成网络,不满足骑行宽度要求以及拥挤是驱使电动自行车骑行者选择占用机动车道骑行和穿插骑行的主要原因.

有关电动自行车逆向骑行原因的调查结果见表2.由表2可知,没有足够路权,机动车流的阻断,使电动自行车无法及时穿越到路对面是电动自行车逆向骑行的根本原因.在逆向骑行时,43.76%的骑行者会选择靠右骑行,即靠近路缘逆向骑行;42.24%的骑行者会选择靠左骑行,即靠近机动车流逆向骑行;5.76%的骑行者选择在道路中央逆向骑行,即在双向机动车流中逆向骑行.对于逆向骑行的距离,42.75%的骑行者选择相邻的两个交叉口,21.03%的骑行者选择根据信号灯长和车流量而定.
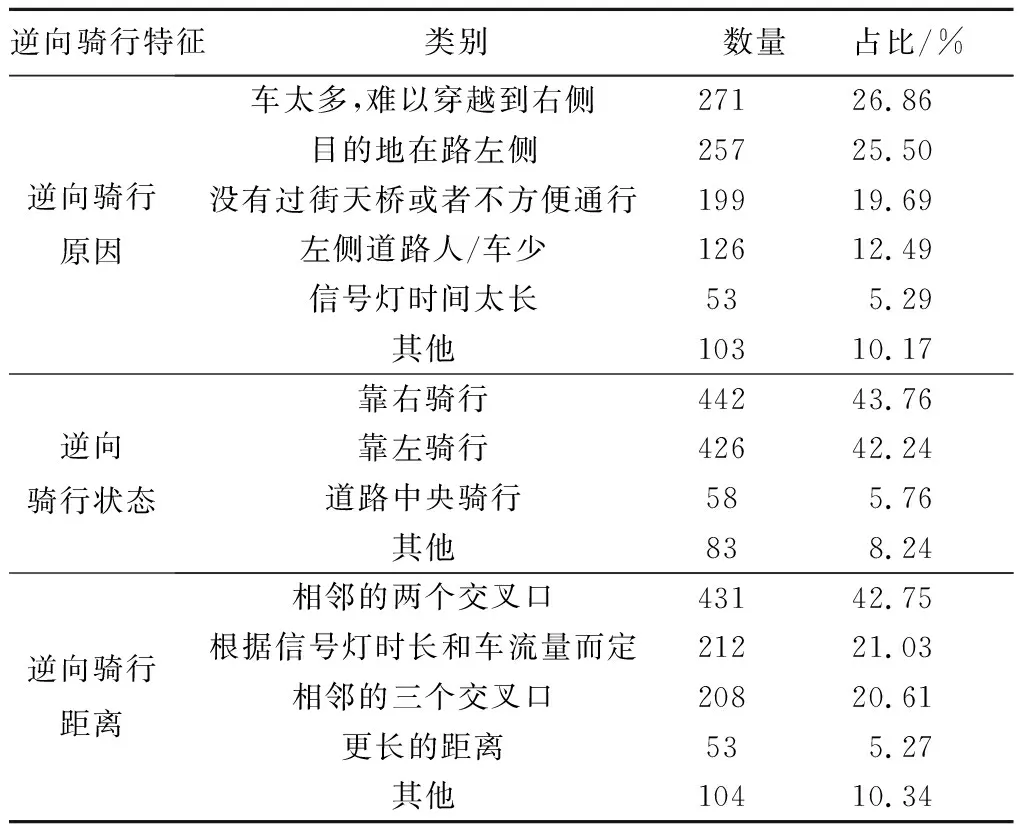
表2 电动自行车逆向骑行原因及行为特征Tab.2 Reason and behavior characteristics of reverse riding on electric bicycles
2 电动自行车骑行决策行为模型
2.1 模型构建
电动自行车不安全骑行决策行为属于是与否的二分类问题[4].二值多元Logistic回归模型是用来研究二分类问题的有效方法.令x1,x2, …,xk是影响电动自行车不安全骑行决策行为的k个因素,y是0、1变量,y=1为选择不安全骑行行为,y=0为选择安全骑行,采用二值多元Logistic回归方程建立电动自行车不安全骑行决策行为模型,则电动自行车骑行者选择不安全骑行行为的概率为
p1=p(y=1|x1,x2,…,xk)=
(1)
式中:p1为电动自行车不安全骑行事件发生的概率;xi为影响电动自行车不安全骑行事件发生的因素变量,i=1, 2, …,k;α,βi为回归系数.
电动自行车骑行者选择安全骑行行为的概率p2为
p2=p(y=0|x1,x2,…,xk)=
1-p(y=1|x1,x2,…,xk)
(2)
将Logistic回归模型进行整理,可得
(3)
基于问卷调查结果,共选择个人属性、出行特征和车辆用途3大类,11个因素作为电动自行车不安全骑行决策行为模型的同质性输入变量.其中,个人属性包括性别、年龄、职业、受教育程度以及年收入5个变量;出行特性包括出发时间、回家时间、出行时长、出行距离以及出行目的5个变量;车辆用途是一个变量分为自用和外卖/快递两类.在同质性输入变量的基础上,针对占用机动车道骑行、穿插骑行和逆向骑行3类不安全骑行决策行为,从道路特性和交通环境两个层面,分别引入异质性模型变量,构建3类电动自行车不安全骑行决策行为模型.
利用SPSS 24.0进行二元多值Logistic模型拟合,剔除初步结果中与3类电动自行车不安全骑行决策行为不显著相关的因变量,得到3类模型参数估计结果如表3所示.表3中β为回归系数,Wald值为Wald检验统计量.通过查询Wald临界值可知,当自由度为1,α=0.05时,Wald临界值为3.841,即当Wald值大于3.841时说明因变量和自变量之间存在显著的相关关系.显著性则反映了自变量和因变量之间关系的显著性水平,显著性值越小说明自变量和因变量之间的关系越显著.当显著性水平小于0.05时,说明该自变量和因变量之间关系显著,当显著性水平小于0.01时,说明关系十分显著.
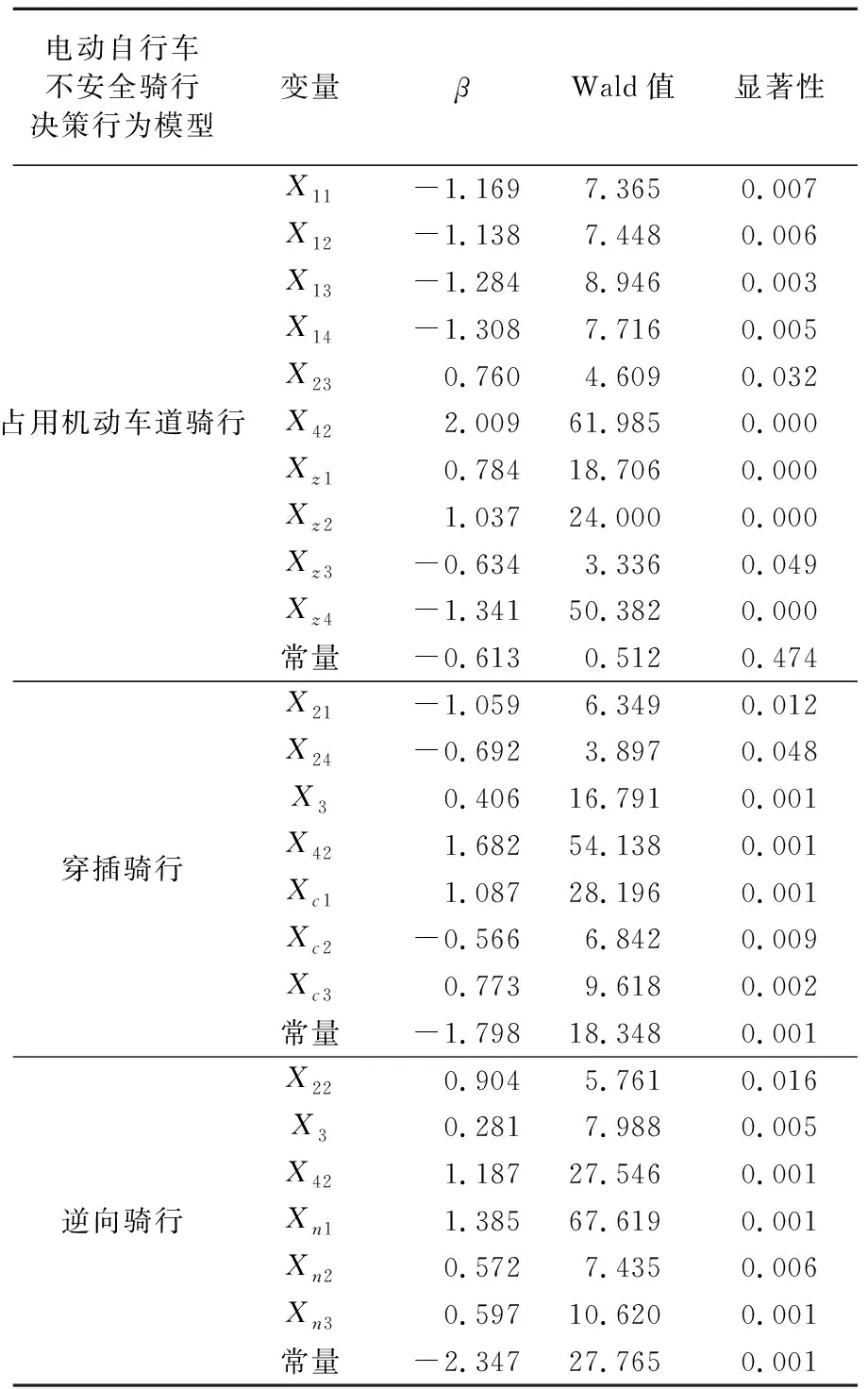
表3 电动自行车不安全骑行决策行为模型参数估计结果Tab.3 Parameter estimation results for decision-making model of unsafe riding behaviors on electric bicycles
将拟合得到的显著性因素参数带入式(3),可得到基于Logistic回归的电动自行车占用机动车道骑行决策行为模型、穿插骑行决策行为模型和逆向骑行决策行为模型分别为
1.28X13-1.31X14+0.76X23+2.01X42+
0.78Xz1+1.04Xz2-0.63Xz3-1.34Xz4
(4)
0.41X3+1.68X42+1.09Xc1-
0.57Xc2+0.77Xc3
(5)
1.19X42+1.39Xn1+0.57Xn2+0.60Xn3
(6)
式中:pz1、pc1、pn1分别为电动自行车骑行者选择占用机动车道骑行、穿插骑行和逆向骑行行为的概率;X11、X12、X13、X14为家庭年收入类别,分别为5万以下、5~10万、10~20万、20~50万,默认对比项为50万以上;X21、X22、X23、X24为回家时间类别,分别为17点之前,17-18点、18-19点、19-22点,默认对比项为22点以后;X3为出行时长;X42为电动自行车用途(外卖/快递车辆);Xz1为非机动车道过窄,Xz2为机动车较少,Xz3为公交车占道,Xz4为占道骑行时会减速;Xc1为存在路边停车,Xc2为存在公交车停靠,Xc3为存在伺机转弯需求;Xn1为机动车流量过大,Xn2为左侧道路车流量较少,Xn3为目的地在路左侧.
2.2 模型解释
由模型结果可知,个人属性、出行特性和车辆用途等同质性输入变量方面,家庭收入水平、回家时间、出行时长和电动自行车用途对电动自行车不安全骑行决策行为具有显著影响.其中家庭收入水平与电动自行车占用机动车道骑行决策行为显著负相关,对其他两种不安全骑行决策行为影响不显著.
回家时间不同对电动自行车不安全骑行决策行为影响不同.参数估计结果表明,在17点至19点回家时,电动自行车骑行者倾向于选择逆向骑行或者是占用机动车道骑行.当骑行者在17点至18点回家时,通过逆向骑行可以节省等待穿越机动车流的时间,导致逆向骑行行为的增加.19点以后,交通状况好转,一定程度上会减少在机动车之间穿插骑行行为.
出行时长和穿插骑行决策行为以及逆向骑行决策行为显著正相关,与占用机动车道骑行决策行为无显著关系.参数估计结果表明,随着出行时长的增加,电动自行车骑行者有增加穿插骑行和逆向骑行行为的倾向.
电动自行车作为快递/外卖车辆使用与电动自行车占用机动车道骑行、穿插骑行和逆向骑行决策行为均显著正相关.这与骑行者职业特性有关,因为快递/外卖业务追求时效性,导致电动自行车骑行者忽视安全问题,倾向于做出不安全骑行行为的决策.
在异质性模型变量方面,非机动车道宽度不足或者机动车道车流量较小时,会导致电动自行车骑行者做出倾向于占用机动车道骑行的决策.公交车占道反而会抑制骑行者占用机动车道骑行,可能是因为在公交车停靠时,骑行者更多会选择靠近人行道侧通过或者选择等待.
是否存在路边停车和是否存在伺机转弯与穿插骑行决策行为显著正相关;是否存在公交车停靠与穿插骑行决策行为显著负相关.当存在路边停车挤压电动自行车骑行的横向空间,会促使骑行者在机动车之间穿插骑行.当存在公交车停靠时,骑行者反而倾向于不选择在机动车之间穿插骑行.当有转弯到路对侧的骑行需求时,为了尽快转弯骑行者更倾向于在机动车之间穿插骑行.
机动车流量过大,左侧道路车流量较少和目的地在路左侧3个因素与逆向骑行决策行为显著正相关.当骑行者的目的地在道路左侧时,为了避免从道路交叉路口绕远折返以及等待信号灯,骑行者会选择从上一个交叉口或者更远的距离开始逆向骑行.机动车流量过大导致骑行者难以穿越以及左侧道路车流量较少的情况也会诱发骑行者选择逆向骑行行为.
3 模型拟合效果
采用Omnibus和Hosmer-Lemeshow检验对建立的3类电动自行车不安全骑行决策行为模型进行模型系数和拟合优度检验,结果如表4所示.检验结果表明,建立的3类电动自行车不安全骑行决策行为模型均通过模型系数和拟合优度检验,具有较好的模型性能和拟合优度.在拟合优度方面,建立的电动自行车穿插骑行决策行为模型拟合效果最好,电动自行车逆向骑行决策行为模型拟合效果次优,电动自行车占用机动车道骑行决策行为模型拟合效果一般.

表4 构建模型的系数和拟合优度检验
为了验证模型的预测效果,采用建立的3类电动自行车不安全骑行决策行为模型分别对电动自行车占用机动车道骑行、在机动车之间穿插骑行和逆向骑行3种决策行为进行预测,结果如图3所示.
通过对比分析可知,建立的3种电动自行车不安全骑行行为决策行为模型,对占用机动车道骑行决策行为的预测效果最好,为62.1%;逆向骑行决策行为的预测效果次之,为57%;穿插行为预测效果一般,为45.9%.因为穿插骑行行为最为危险,发生的概率性也较小,因此预测结果出现了较大偏差.总体上,所建立的3类电动自行车不安全骑行行为模型对骑行决策行为预测的正确率分别为73.2%,71.5%和74.8%,预测效果较好.
4 结论
1) 电动自行车不安全骑行决策行为和家庭年收入、回家时间、出行时长和是否为外卖/快递车辆等同质性输入变量显著相关.在异质性模型变量方面,非机动车道宽度和机动车流量与占用机动车道骑行决策行为显著正相关;公交车占道以及占道骑行时是否会减速与占用机动车道骑行决策行为显著负相关.路边停车和伺机转弯需求与在机动车之间穿插骑行决策行为显著正相关;公交车停靠与穿插骑行决策行为显著负相关.机动车流量,左侧道路车流量和目的地在路左侧3个因素与逆向骑行决策行为显著正相关.
2) 建立的电动自行车穿插骑行决策行为模型拟合效果最好,电动自行车逆向骑行决策行为模型拟合效果次优,电动自行车占用机动车道骑行决策行为模型拟合效果一般.
3) 建立的3类电动自行车不安全骑行行为模型对不安全骑行决策行为预测的正确率分别为73.2%,71.5%和74.8%,预测效果较好.研究结论可为交通管理者制定科学合理的政策法规和管理方案提供理论基础.
猜你喜欢
少先队活动(2022年5期)2022-06-06
音乐天地(音乐创作版)(2022年1期)2022-04-26
音乐天地(音乐创作版)(2022年1期)2022-04-26
中华诗词(2020年12期)2020-07-22
当代工人(2019年22期)2019-12-20
汽车与安全(2018年1期)2018-05-14
读者(2016年15期)2016-07-09
