木材转运设备虚拟设计与运动仿真
2021-04-01 17:40王跃董希斌
森林工程 2021年1期
关键词:运动仿真
王跃 董希斌


摘 要:为实现中国通商口岸木材的自动化搬运,本文设计一款专用于木材转运的机械设备。采用Creo5.0中的Parametric模块对木材转运设备的各个机构和零件进行三维建模,主要包括龙门架主体框架结构、夹持机构和运载火车底盘(轨距为1 435 mm和1 520 mm)。根据运动方式的不同,采用不同的连接方式对各个机构进行装配,在夹持机构夹片末端内侧添加一个观测点,并对装配模型进行运动仿真分析。仿真结果表明,木材转运设备的各个机构能够协调工作,解决了各个零件之间的装配方式与运动合理性问题;对木材转运设备的三维模型进行优化,以提高木材转运的效率,使设计方案更加完善,为木材转运设备的后续研究与优化奠定基础。
关键词:木材转运;龙门架;夹持机构;虚拟设计;运动仿真
中图分类号:S776.3 文献标识码:A 文章编号:1006-8023(2021)01-0059-07
Abstract:In order to realize the automatic transportation of wood at Chinas trade ports, this paper designs a special mechanical equipment for timber transfer. The parametric module of Creo5.0 is used to model the various mechanisms and parts of the timber transfer equipment, including the main frame structure of the gantry frame, clamping mechanism and the chassis of the carrier train (the gauge is 1 435 mm and 1 520 mm). According to the different motion modes, different connection modes are used to assemble each mechanism. An observation point is added to the inner side of the clamp end of the clamping mechanism, and the dynamic simulation analysis of the assembly model is carried out. The simulation results show that the various mechanisms of the designed timber transfer equipment can coordinate work, and solve the problems of assembly mode and motion rationality between the various parts; optimize the three-dimensional model of the timber transfer equipment, in order to improve the efficiency of timber transfer, make the design scheme more perfect, and lay a foundation for the follow-up research and optimization of timber transfer equipment.
Keywords:Timber transfer; gantry; clamping mechanism; virtual design; motion simulation
0 引言
隨着经济的不断增长,我国已经成为世界最大的木材制品生产国与贸易国。国内对木材的需要与日俱增,且我国已于2017年全面禁止天然林商业性采伐[1]。因此,近年来我国的木材以进口为主,其主要来源国之一为俄罗斯。木材的运输方式一般采用铁路运输,铁路轨距为1 520 mm[2],而中国的货运铁路轨距为1 435 mm。由于轨距的不同,目前木材转运的方式主要为人工搬运,存在效率低、成本高和安全性差等问题,并会对木材造成损伤[3-7]。基于以上背景,本文设计一款专用于木材转运的机械设备,可有效解决上述问题,提高木材的使用效率。
1 木材转运设备的整体方案设计
转运设备性能的优劣直接影响木材的转运效率、转运成本及转运的质量。木材转运设备需具备以下几项关键技术:①严格的安全性,保证施工作业人员的安全;②高效作业的能力,实现对木材的快速转运;③较高的精度,减小木材转运过程中对木材的损伤;④较强的适应性与移动性,保证木材转运设备能够沿着轨道自由移动并能够夹持不同长度的木材;⑤操作简单,能够使操作人员快速掌握操作流程;⑥较高的经济性,使初期设备制造、日常维护及维修成本较低。
根据上述6点原则性的要求,通过Creo Parametric(参数化建模软件)对木材转运设备进行设计,其整体结构如图1所示。木材转运设备由龙门架结构、夹持机构、动力系统、传动系统、变速系统和液压系统等部分组成。
(1)龙门架结构:龙门架是构成木材转运设备的主要承重构件,在设计过程中要保证有足够的稳定性和刚度,以达到支撑整个设备的各个构件及被夹持木材的目的[8-10],从而保证作业人员的生命安全。龙门架结构采用倒V型单梁式结构,这种结构能够在安全工作的前提下,尽可能地减小自重;龙门架的净高度控制在火车车厢满载时上方3 m的位置,保证木材转运设备可以灵活移动,不受车厢与木材的限制;龙门架结构下方设置钢轮,确保龙门架结构能够灵活地沿着轨道移动,提高龙门架移动的灵活性。
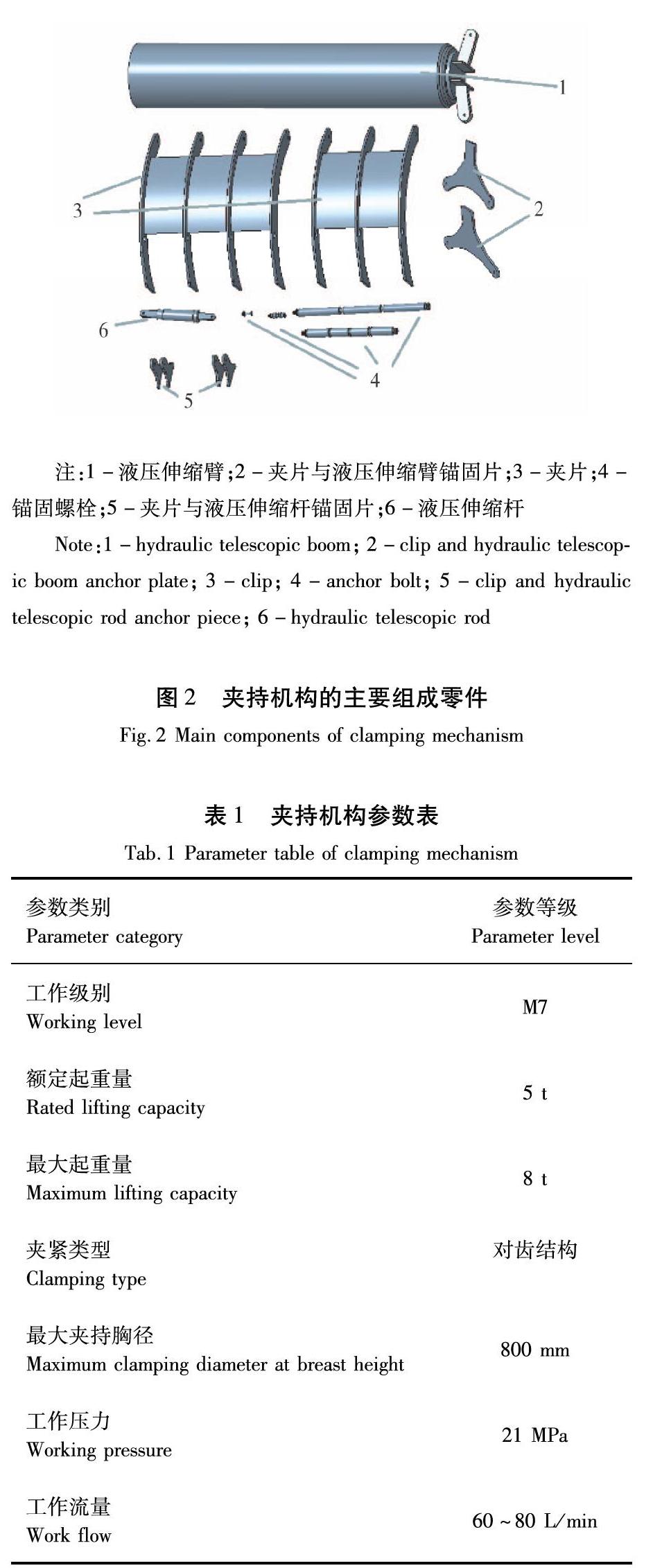
(2)夹持机构由液压伸缩臂、液压杆、夹持夹片、夹持夹片轴、轴承、锚固杆与锚固螺丝等部分组成,设计时,在保证实际承载能力的前提下,要尽量轻量化,减少自重[11-13]。夹持机构采用旋转机械抓手结构,在实现夹持机构轻量化的同时,能够夹持不同直径的木材,从而提高木材转运设备的效率,为木材转运提供稳定与安全的保证。
(3)动力系统与制动系统为龙门架行走提供稳定的动力与制动力。传动系统与变速系统为夹持机构移动传递动力。液压系统为夹持机构夹片收紧与放开时提供稳定的动力,液压伸缩杆一侧固定在伸缩臂底部锚固螺栓上,另一侧固定在夹片的锚固螺栓上,通过液压伸缩杆的伸缩移动来控制夹片的收紧与放开。因为液压伸缩杆的伸缩能够被精确地控制,夹持木材的过程中能够对木材进行精准夹持,减少对木材的损伤。
转运设备工作时,通过手持控制器将龙门架移至木材夹持位置,操纵液压伸缩臂下降至合适位置,收紧夹片夹起木材,操纵伸缩臂上升,然后通过手持控制器使丝杠的伺服电动机转动,从而带动整个夹持机构沿着转运火车车厢方向移动,待夹持机构到达转运位置时,控制伸缩臂精准下降至转运火车车厢平面或其他堆积的木材上方,放开夹持机构的夹片。最后夹持机构恢复到初始位置,至此一次转运循环结束。在连续工作状态下,能够实现木材转运的连续性,提高木材转运的效率,替代人工的高强度作业,同时降低人工转运木材时可能产生的危险。
2 夹持机构的三维建模与工作原理
夹持机构是实现木材转运的核心机构,贯穿于木材转运的全过程[14],因此本节将重点对夹持机构的参数进行设计。夹持机构承担着夹取与释放木材两项任务,需要各个组成构件之间的共同配合来完成夹取木材与释放木材的动作,主要协同的构件有液压伸缩臂、锚固螺丝、锚固杆、夹片和液压杆。夹持机构的主要组成零件如图2所示。夹持机构的主要参数见表1。
夹持机构夹取与释放木材动作的实现是通过液压杆驱动夹片绕轴转动来完成张合动作的。通过控制液压杆的伸缩状态,最终实现夹持机构的夹片收缩与放开,实现对木材的夹取与释放,从而达到设计目的。夹持机构在设计时,液压伸缩杆的伸缩范围要满足夹片的转动范围,当液压伸缩杆收缩带动夹片放开到最大时,夹片末端之间的距离必须大于木材的直径,确保夹持机构的液压伸缩臂下落到合适位置时,夹片能够将木材包裹并能够将木材顺利夹起。当液压伸缩杆伸长带动夹片收紧到最小时,两个夹片末端内测的切向夹角不宜过大,否则会产生过多的动作,影响木材转运设备的转运效率。液压伸缩杆伸缩过程中不能与其他零件产生干涉,确保夹持机构顺畅地运行。
夹持机构的工作过程如下:①木材转运设备停稳后,通过操纵夹持机构的液压伸缩臂使其下降至合适位置;②通过控制器操纵夹持机构的液压伸缩杆使其伸长,带动夹片转动直至夹片内侧与原木刚刚接触;③通过操纵夹持机构的液压伸缩臂使其上升至合适位置;④通过控制器操纵龙门架丝杠转动,从而带动夹持机构沿着转运火车方向移动到合适位置;⑤通过操纵夹持机构的液压伸缩臂,使其下降至木材刚好触碰到转运火车车厢平面或触碰到其他已经堆积的木材⑥通过控制器操纵夹持机构的液压伸缩杆收缩,从而带动夹片向外侧展开直至木材能够平稳地离开,并放置在火车上。
完成上述过程后,夹持机构恢复到初始位置,然后不间断再次进行木材转运操作,实现木材转运的连续性,提高了木材转运的效率。在木材转运期间,通过操纵控制器来控制木材转运设备的移动与夹持木材的动作,无需人工辅助操作,大大地增加了木材转运的安全性。
3 木材转运设备的虚拟设计及运动仿真
3.1 虚拟装配
使用Creo Parametric对木材转运设备的各个零件进行建模设计,各个零件设计完成后,对各个零件进行装配。Creo Parametric装配时提供许多配对方式,例如刚性连接、销连接和滑块连接等,根据各个零件的需要选择合适的配对方式,消除零件之间的干涉,完成对三维模型各个零件的装配[15-18]。
利用Creo Parametric中的机构功能,根据三维模型的实际运动动作,将三维模型的各个零件采用不同的连接方式进行装配,并赋予相對应的运动方式,将这些零件组成一个运动仿真模型,同时对各个零件添加材料属性。整个机构设置有4个销连接,4个滑块连接, 1个丝杠连接(丝杠与滑台的连接)。对各个连接添加运动驱动,共设置12个伺服电动机,同时添加木材与夹片的3D接触,并给仿真环境添加重力,方向为-Y方向。保证三维模型在后续的仿真过程中与真实情况保持一致。
添加伺服电动机的参数,根据木材转运设备的运动过程,定义伺服电动机的开始时间与终止时间,控制各个零件或装配体的运动过程,木材转运设备工作过程中各个伺服电动机的工作时间见表2。
3.2 运动仿真
在建立木材转运设备的运动仿真模型后,进行运动的仿真与分析。设置仿真开始时间为0 s,结束时间为109.2 s,共计时长109.2 s,帧数为10,帧数和仿真时长的设置具有一定的比例关系,用来控制仿真动画的流畅度。设置初始条件为初始位置时拍摄的快照,然后进行仿真与解算。点击“测量”按钮可以对模型选择观测点或观测轴,对模型进行观测,并绘制曲线。木材转运设备的工作状态按照时间顺序分为初始状态、夹持木材状态、夹持机构横向运动状态、夹持机构放下木材状态、最终回到初始状态,各个状态时的仿真状态如图3所示。
3.3 仿真结果与讨论
根据伺服电动机与液压缸的工作速度与各个机构间的位置关系,确定运动仿真过程总计用时109.2 s,夹持机构夹片的位移、速度和加速度曲线如图4所示。
图4(a)反映了木材转运设备在X轴方向上没有任何运动,这与实际情况是一致的。图4(b)反映了Y轴的位置曲线、速度曲线和加速度曲线。图4(c)反映了Z轴的位置曲线、速度曲线和加速度曲线。由图4可以看出,夹持机构在9.2 s时到达木材的抓取位置,在9.2~14.3 s夹持机构夹持木材,在14.3~23.5 s夹持机构带动木材上升至合适位置,在23.5~45.8 s夹持机构沿着转运木材火车的方向横向运动,在45.8~63.8 s夹持机构下降至合适位置处,在63.8~68.9 s夹持机构放下木材,在68.9~86.9 s夹持机构上升至初始高度,在86.9~109.2 s夹持机构返回到初始位置处。至此,夹持机构转运木材的一个完整的运动仿真过程结束。
本论文基于虚拟样机技术研究木材转运设备,充分發挥虚拟样机的优势,节省了传统理论模式下大量物理样机测试与反复设计改进所需要的时间,不仅提高了研发效率,而且显著缩短了研发周期。通过运动仿真的过程可以看出,相对于人工转运(人工转运通常情况下需要400~600 s的时间),本文所设计的木材转运设备可以极大地提高木材转运效率,有效地改变传统人工木材转运过程中存在的效率低、成本高和安全性差等缺陷。
4 结束语
通过Creo Parametric建立了木材转运设备的三维模型,并通过其中的机构模块对模型进行了运动仿真分析,有效地解决了各装配零件之间的装配类型、驱动的添加及仿真合理性的问题。通过仿真分析,木材转运设备进行一个全过程周期总计用时109.2 s,并可进行连续不间断操作。
本论文所设计的木材转运设备,充分体现了现在木材转运的发展趋势与要求,不仅改变了国外输入我国木材的转运方式,而且对整个木材转运行业发展具有一定的促进作用,有效地替代了人工,缩减了劳动力,提高了木材转运的效率,降低了由于人工搬运木材而产生的危险性。
【参 考 文 献】
[1]王凯,王洛高,杨洪娟,等.2011—2017年中国进口木材上截获有害生物情况分析[J].山东林业科技,2019,49(1):87-90.
WANG K, WANG L G, YANG H J, et al. Analysis of the intercepted pests of imported timber in China during 2011-2017[J]. Journal of Shandong Forestry Science and Technology, 2019, 49(1): 87-90.
[2]李典易,陈勇.亚欧大陆跨境铁路的轨距问题[J].国际政治研究,2019,40(6):87-122.
LI D Y, CHEN Y. The break-of-gauge problem of cross-border railways on the Eurasian continent[J]. The Journal of International Studies, 2019, 40(6): 87-122.
[3]丁建梅,胡永冉,丁建华,等.基于ANSYS水稻覆膜直播机机架的有限元分析[J].森林工程,2020,36(4):58-63.
DING J M, HU Y R, DING J H, et al. Finite element analysis of rice film mulching direct seeding machine frame based on ANSYS[J]. Forest Engineering, 2020, 36(4): 58-63.
[4]孙彦君,郑文生,李芳花,等.膜下滴灌施肥喷药膜上播种覆土技术研究[J].林业机械与木工设备,2018,46(6):18-20.
SUN Y J, ZHENG W S, LI F H, et al. Study on the technology for sowing and mulching over the membrane and drip irrigation[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(6):18-20.
[5]王永波.多用途组合式盾构门式起重机[J].港口装卸,2020,42(2):34-36.
WANG Y B. Multi-purpose combined shield gantry crane[J]. Port Operation, 2020, 42(2):34-36.
[6]黄丽群.基于ADAMS的门式起重机大车运行机构动力学分析[J].机电工程技术,2020,49(3):94-96.
HUANG L Q. Dynamic analysis of gantry crane trolley running mechanism based on ADAMS[J]. Mechanical & Electrical Engineering Technology, 2020, 49(3):94-96.
[7]邓彦舒,方滨,许志沛.门式起重机结构优化设计[J].中国重型装备,2020,35(1):17-19.
DENG Y S, FANG B, XU Z P. Structure optimization design of gantry crane[J]. China Heavy Equipment, 2020, 35(1):17-19.
[8]潘明,陈钦鸿,苏和锴,等.20t桥式起重机桥架设计及静态刚性试验[J].机械研究与应用,2020,33(1):139-141.
PAN M, CHEN Q H, SU H K, et al. Frame design and static rigidity test verification of 20t bridge crane[J]. Mechanical Research & Application, 2020, 33(1): 139-141.
[9]张令山.浅谈门式起重机主梁静动态特性[J].中国设备工程,2020,36(1):90-92.
ZHANG L S. Static and dynamic characteristics of main beam of gantry crane[J]. China Plant Engineering, 2020, 36(1):90-92.
[10]彭军.门式起重机主梁静动态特性分析[J].机械与电子,2019,37(9):16-19.
PENG J. Analysis of static and dynamic characteristics of gantry crane girder[J]. Machinery & Electronics, 2019, 37(9):16-19.
[11]韩晓建,杨卫杰,高寰宇,等.基于连杆机构的四足仿生机器人运动学分析及足迹优化[J].森林工程,2017,33(1):52-58.
HAN X J, YANG W J, GAO H Y, et al. The kinematics analysis and footprint optimization of the four legged bionic robot based on linkage mechanism[J]. Forest Engineering, 2017, 33(1): 52-58.
[12]黃伟莉,徐英帅,范芳蕾,等.基于有限元分析的起重机主梁结构设计与优化[J].现代制造技术与装备,2019,55(11):17-19.
HUANG W L, XU Y S, FAN F L, et al. Design and optimization of crane girder structure based on finite element analysis[J]. Modern Manufacturing Technology and Equipment, 2019, 55(11):17-19.
[13]匡刘林,黄伟莉,范芳蕾,等.基于ANSYS的桥式起重机桥架结构设计及优化[J].现代机械,2019,46(5):70-73.
KUANG L L, HUANG W L, FAN F L, et al. Structural design and optimization of bridge crane girder based on ANSYS[J]. Modern Machinery, 2019, 46(5):70-73.
[14]薛占璞.挖掘机伸缩臂结构设计[J].内燃机与配件,2019,40(19):230-231.
XUE Z P. Structural design of telescopic arm of excavator[J]. Internal Combustion Engine & Parts, 2019, 40(19):230-231.
[15]吴昊,董希斌.基于UG的山地自行升降式采种机运动仿真[J].森林工程,2011,27(3):39-42.
WU H, DONG X B. Motion simulation of self-lifted seed harvester in mountain based on UG[J]. Forest Engineering, 2011, 27(3): 39-42.
[16]张良明,高飞,胡荣保,等.桥式起重机虚拟样机的运动仿真研究[J].中国制造业信息化,2011,40(11):26-28.
ZHANG L M, GAO F, HU R B, et al. Study on the kinematical simulation of virtual prototype for the bridge crane[J]. Machine Design and Manufacturing Engineering, 2011, 40(11):26-28.
[17]童秀英.森林采伐剩余物运输设备设计研究[J].林业机械与木工设备,2018,46(8):25-27.
TONG X Y. Study on the design of forest harvesting residue transport equipment[J]. Forestry Machinery & Woodworking Equipment, 2018, 46(8):25-27.
[18]马晓波,董希斌,曲杭峰,等.履带式采伐剩余物翻转运输车虚拟设计及运动仿真[J].东北林业大学学报,2018,46(6):97-101.
MA X B, DONG X B, QU H F, et al. Virtual design and motion simulation of crawler turnover transport vehicle for logging slash[J]. Journal of Northeast Forestry University, 2018, 46(6): 97-101.
猜你喜欢
科技创新与应用(2017年6期)2017-03-23
山东工业技术(2017年3期)2017-03-16
教育教学论坛(2016年52期)2017-03-12
汽车科技(2016年6期)2016-12-19
科技视界(2016年17期)2016-07-15
科技视界(2016年10期)2016-04-26
现代电子技术(2015年8期)2015-07-09