
基于NAF-FxLMS控制器的垂尾抖振主动控制
2021-03-31 06:32杨智春牛文超
振动与冲击 2021年6期
刘 昊,杨智春,牛文超,李 魁,王 巍
(西北工业大学 航空学院,西安 710072)
在自适应振动主动控制系统中,通常采用有限脉冲响应(finite impulse response,FIR)滤波器作为自适应控制器。FIR控制器具有结构简单的优点,控制器参数的更新通常采用FxLMS (filtered-x least mean square)算法[1]。FxLMS算法决定了自适应控制系统的稳定性、收敛速度、鲁棒性等性能。为了提高振动主动控制系统的性能,研究人员对FxLMS算法提出了两类改进措施:一类是对控制器结构的改进,例如,采用IIR (infinite impulse response)滤波器作为自适应控制器的滤波x递归最小二乘(FxRLS)算法[2-3];另一类是对影响FxLMS算法性能的收敛步长改进,使用变步长的策略提高来FxLMS算法的收敛速度和收敛精度,常见的有归一化变步长FxLMS算法[4]、泄漏FxLMS(filter-x recursive least square)算法[5]等。
对算法中次级通道的改进也可以改善FxLMS算法性能。Ardekani等[6]的研究表明,适当调整次级通道辨识模型的设计参数,可以提高FxLMS算法的收敛速度;李嘉全等[7]验证了增加次级通道的阻尼可以提高FxLMS算法的性能,还提出了一种前馈阻尼补偿的FxLMS算法[8],通过构造一个期望的次级通道模型,使用LMS算法迭代更新得到前馈阻尼补偿器,来实现对次级通道的阻尼补偿,并进行了仿真验证,但是这种设计方法在实际应用中,面对复杂的多模态系统,很难构造一个期望的次级通道模型,而且无法保证前馈阻尼补偿器的系数收敛。
正位置反馈(positive position feedback,PPF)控制最早由Goh等[9]提出,其原理是通过引入一个高阻尼的补偿器来提高控制系统的阻尼,达到振动抑制的目的,具有简单易行、不容易发散、对溢出不敏感等优点,但是通常控制效果有限,属于低权限控制方法(low authority control,LAC)。加速度负反馈控制(negative acceleration feedback,NAF)与正位置反馈控制原理相同,有更强的适应性和大范围的稳定特性[10]。
双垂尾布局是现代高性能战斗机普遍采用的一种构型,在大攻角机动飞行条件下,其机身前体或机翼后缘的分离涡产生的非定常气动载荷会作用在垂尾上,带来严重的气动弹性抖振问题,国外学者的研究表明利用压电作动器对垂尾抖振作振动压电主动控制是解决该问题的有效途径[11]。
针对飞机垂尾抖振响应控制对控制收敛速度和避免高阶模溢出的要求,本文在改进反馈式次级通道阻尼补偿的基础上,改进FxLMS算法结构,实现了将进入NAF控制器的误差信号解耦,并从理论上证明了方法的可行性,设计了基于NAF控制器反馈阻尼补偿的改进FxLMS控制器(NAF-FxLMS控制器)。通过垂尾抖振响应主动控制的地面模拟实验,验证了本文所提出的NAF-FxLMS控制器的控制性能优于NAF控制器和FxLMS控制器的控制性能。
1 NAF-FxLMS控制算法
1.1 NAF控制原理
常用的加速度负反馈控制器是一个二阶低通滤波器,其传递函数为
(1)
式中:ξc为控制器的阻尼比;ωc为控制器的固有频率。二阶低通滤波器具有衰减高频响应的频响特性,所以在振动控制中,该滤波器几乎不影响结构的高频响应,避免了由于控制器对高阶模态产生影响而导致系统不稳定的控制溢出现象。
在结构振动响应主动控制的实际应用中,传感器与作动器非共位配置、为提高信号质量而对输出信号滤波、作动器存在时滞效应等因素,都会产生相位差,相位差的存在会导致NAF控制器的性能降低,因此必须在反馈回路中增加一个相位补偿项。本文使用一阶全通滤波器来实现相位补偿,其传递函数为
(2)
一阶全通滤波器在整个频带内幅值始终为1,相位偏转180°,参数m决定其相频特性。一阶全通滤波器的Bode图如图1所示。
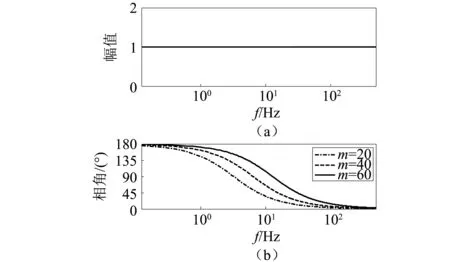
图1 一阶全通滤波器的Bode图Fig.1 Bode diagram of first-order all-pass filter
本文采用的宏纤维复合材料(macro fiber composite,MFC)压电作动器本质上是一种应变型作动器,在垂尾结构抖振压电主动控制设计时,通常采用在结构应变最大处粘贴压电作动器,在结构加速度响应最大处放置加速度传感器的配置方案。在传感器和作动器非共位布置的情况下,NAF控制系统的结构框图如图2所示。
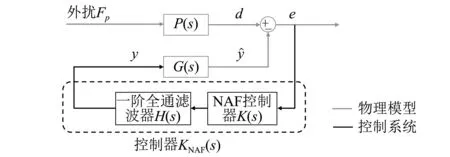
图2 NAF控制系统示意图Fig.2 Schematic diagram of NAF control system

1.2 基于NAF控制器的反馈式阻尼补偿方法
NAF控制系统使用加速度响应作为反馈信号,控制系统通过以下两个方程描述[12],式(3)表示被控结构,式(4)表示NAF控制器
(3)
(4)
式中:x和u分别为被控结构和控制器的状态向量;ξ和ξc分别为被控结构和控制器的阻尼比;ω和ωc分别是系统和控制器的固有频率;g为控制增益。系统稳定的充分必要条件为g>0。
1.3 NAF-FxLMS控制算法
本文提出的NAF-FxLMS 控制算法原理如图3所示,相较于经典FxLMS控制算法做了两点改进:①经典FxLMS控制算法一般要求预知外激扰作为参考信号,但是在实际的结构振动主动控制中,外激扰信号难以预知和采集,故这里采用了一种参考信号重构的方法[13]来提供参考信号;②采用本文1.2节中提出的反馈式阻尼补偿方法,设计NAF控制器来对次级通道进行阻尼补偿。
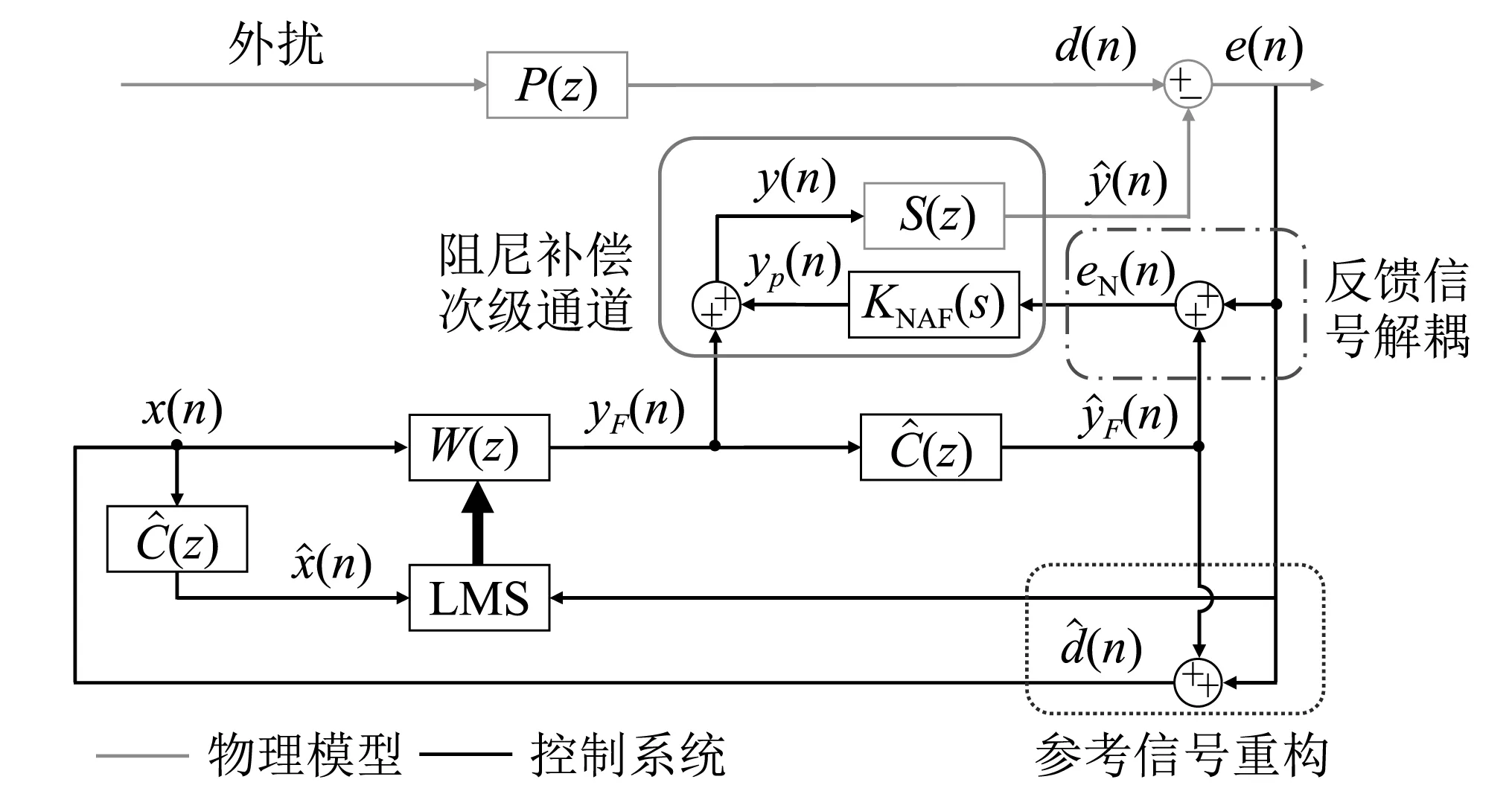
图3 NAF-FxLMS控制算法结构图Fig.3 Block diagram of NAF-FxLMS control algorithm

(5)
W(z)为依据最小均方算法随误差实时更新权值的自适应控制器,同样为FIR滤波器形式,阶数为N,可以表示为
W(z)=[w1w2…wN]T
(6)

(7)


(8)
由式(8)和式(9)可知,eN(n)=x(n),NAF控制器的反馈误差信号与FxLMS控制器的参考信号相同。
参考信号重构的FxLMS算法迭代过程可概括为
(9)
算法步长因子μ满足收敛性要求的选取范围为
(10)
式中,λmax为滤波器输入参考信号的自相关矩阵的最大特征值。
2 垂尾抖振控制验证系统和控制器设计
垂尾结构的抖振响应通常以其低阶模态响应为主,为了验证提出的控制算法性能,为将来的风洞实验提供参考,本节搭建了垂尾模型的抖振主动控制地面实验系统,针对垂尾模型的一阶弯曲模态响应和一阶扭转模态响应设计了多模态的NAF-FxLMS控制器。
2.1 垂尾模型
本文的实验对象是一个模拟真实垂尾结构外形的垂尾模型,垂尾模型如图4所示。
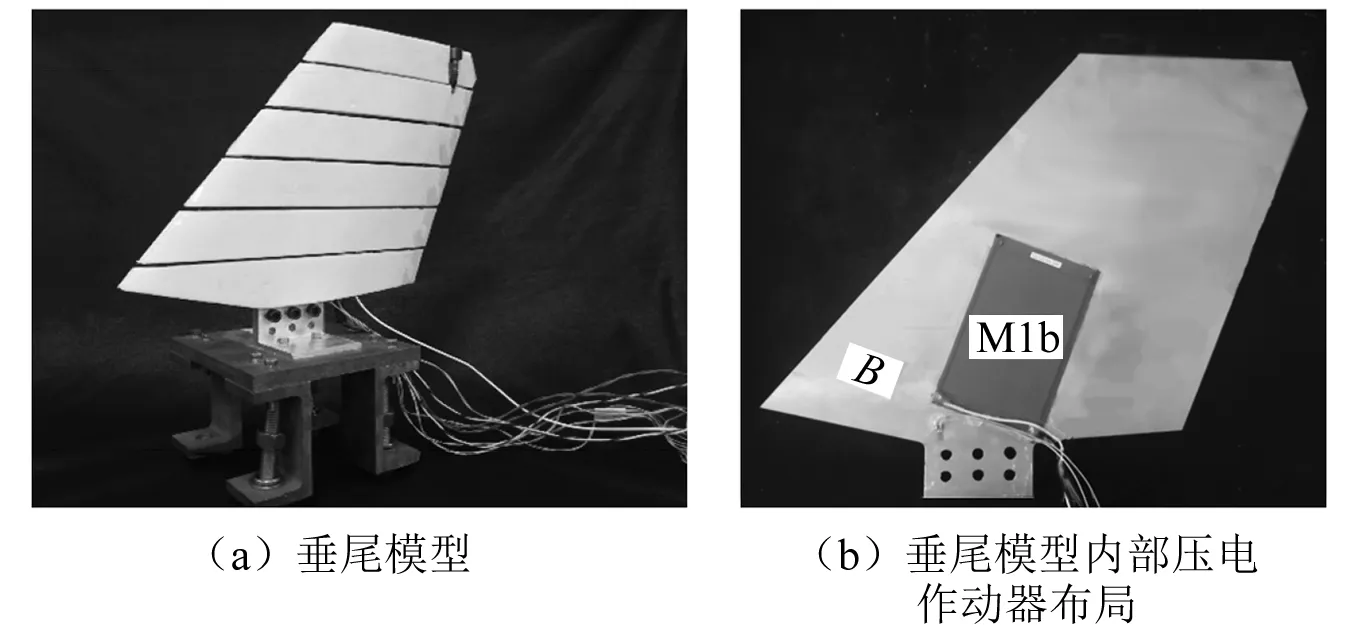
图4 垂尾模型及内部压电作动器布局Fig.4 Vertical tail model and piezoelectric actuator
垂尾模型的具体参数如下:
(1)垂尾模型的展长为0.23 m,有效面积为0.052 m2,翼剖面采用与真实垂尾结构一致的对称翼型。
(2)垂尾模型的内部结构是厚度为1 mm的铝合金板,在铝合金板的两面(A面和B面)对称贴有两片MFC压电作动器(M8557-P1型),粘贴在B面根部的压电作动器命名为M1b(见图4),A面根部的压电作动器命名为M1a。MFC压电作动器的粘贴位置和角度经遗传算法优化得到,该布局方案对垂尾模型的前两阶模态响应均具有控制能力,压电作动器的布局优化方法采用文献[14]提出的压电作动器连续布局优化方法。
(3)在垂尾模型梢部后缘的位置装有一个加速度传感器(PCB 333B30型),用于测量垂尾模型的振动响应。
(4)垂尾模型的边界条件为根部固支,垂尾模型通过根部的夹具与底座连接,底座经螺栓固定在实验台面上。
2.2 垂尾模型的抖振主动控制地面验证实验系统
抖振控制器性能的优劣需要通过抖振主动控制实验的验证,风洞实验验证前需要经过大量的地面实验验证并调试控制器。垂尾模型的抖振主动控制地面实验系统分为三个部分:
(1)实验模型。粘贴MFC压电作动器及加速度传感器的垂尾模型。
(2)激励系统。在QuaRC半实物仿真平台中搭建信号发生器模块产生激励信号,该信号经功率放大器(HVA 1 500/50-4,Smart Material Cop.)放大后,驱动垂尾模型A面根部的压电作动器M1a,模拟抖振载荷对垂尾进行激励。
(3)主动控制系统。通过加速度传感器测量垂尾结构振动响应信号,经过信号调理器输入到QuaRC输入板卡,由搭建在Simulink中的控制器计算出控制信号,该信号通过功率放大器放大后驱动垂尾模型B面根部的压电作动器M1b,实现对垂尾结构的抖振主动控制。
垂尾模型的抖振主动控制地面验证实验系统,如图5所示。
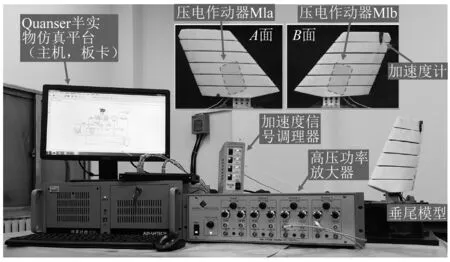
图5 垂尾抖振主动控制地面验证实验系统Fig.5 Active control system for vertical tail buffet
2.3 多模态NAF控制器设计
当需要同时对柔性结构的几个模态进行振动控制时,参照文献[15]将多个PPF控制器并联起来构成多模态PPF控制器的思路。本文针对垂尾模型不同的模态频率设计不同的NAF控制器,将控制不同模态的NAF控制器并联,实现垂尾模型的多模态NAF控制。
NAF控制器频率ωc的选取有三种情况:主动挠性、主动阻尼和主动刚度。为了产生最大阻尼作用,期望实现主动阻尼情况,NAF控制器频率ωc应选择与被控结构的模态频率ω接近,略大于模态频率。NAF控制器的阻尼比ξc的值较小时可以增大主动阻尼的作用域,提高作动器对于不确定模态频率的鲁棒性,然而,这样也会使得阻尼作用减小,增大低模态的柔性,本文考虑阻尼比的两面性,将控制器的阻尼比ξc取值为0.5附近。增益g满足条件g>0即可使NAF控制系统保持稳定。设计的NAF控制器参数见表1。
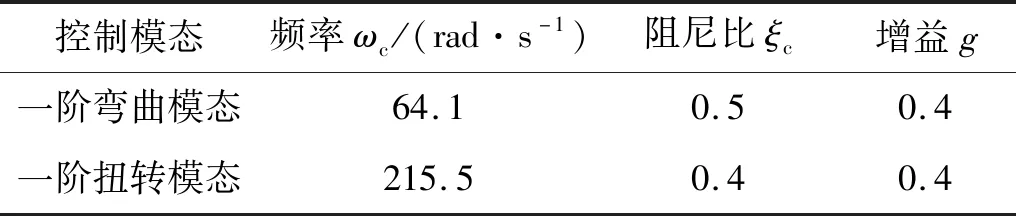
表1 NAF控制器参数Tab.1 Parameters of the NAF controller
2.4 阻尼补偿次级通道离线辨识与多模态NAF-FxLMS控制器设计

图6 阻尼补偿次级通道离线辨识原理Fig.6 Schematic of secondary path offline identification
离线辨识实验使用图5所示的实验系统,由计算机产生辨识输入信号驱动压电作动器M1b,采集垂尾模型梢部加速度响应得到辨识的输出信号。
垂尾模型一阶弯曲模态的阻尼补偿次级通道辨识采用带宽为0~25 Hz的窄带随机信号作为辨识输入信号,采集的加速度响应经带宽为2~25 Hz的8阶Butterworth带通滤波器滤波;垂尾模型一阶扭转模态的阻尼补偿次级通道辨识采用带宽为25~45 Hz的窄带随机信号作为辨识输入信号,采集的加速度响应经带宽为25~45 Hz的8阶Butterworth带通滤波器滤波。辨识输入输出信号的采样频率为1 000 Hz,采集时长为40 s。
垂尾模型一阶弯曲模态和一阶扭转模态的阻尼补偿次级通道辨识结果如图7所示,由于阻尼补偿次级通道是设计NAF控制器对原次级通道进行反馈式阻尼补偿得到的,本文又将其与原次级通道的辨识结果对比。为了定量评价辨识结果的精确度,定义吻合度为

图7 垂尾一阶弯曲模态和一阶扭转模态的阻尼补偿次级通道辨识结果Fig.7 Secondary channel identification results of damping compensation for first bending mode and first torsion mode of vertical tail
(11)

辨识结果显示,垂尾模型一阶弯曲模态原次级通道的辨识模型阶次为1 400阶,与实验模型的吻合度为52.27%;阻尼补偿次级通道的辨识模型阶次为800阶,与实验模型的吻合度为79.42%。垂尾模型一阶扭转模态原次级通道的辨识模型阶次为900阶,与实验模型的吻合度为76.40%;阻尼补偿次级通道的辨识模型阶次为500阶,与实验模型的吻合度为80.78%。
辨识结果表明阻尼补偿后的次级通道,其辨识模型的阶次降低而辨识精度得到提升,由于辨识模型的阶次降低,控制算法的计算复杂度也会减少。
得到指定模态的阻尼补偿次级通道的辨识模型后,根据图2所示的NAF-FxLMS控制算法原理图设计得到针对该模态响应的NAF-FxLMS控制器。多模态NAF-FxLMS控制器的构建采用将单模态控制器并联的方法,设计的多模态NAF-FxLMS控制器中,自适应控制器W(z)的阶次设为32阶,控制算法中的步长因子μ在满足收敛性的范围内,为了使控制收敛速度更快,优先选择较大值,经仿真调试后,设定垂尾模型一阶弯曲模态响应的NAF-FxLMS控制器中的步长因子为3×10-4,垂尾模型一阶扭转模态响应的NAF-FxLMS控制器中的步长因子为1×10-3。
3 实验结果与讨论
本节采用图5所示的垂尾模型的抖振主动控制实验系统,开展了垂尾模型一阶弯曲和一阶扭转模态频率的单频激励控制实验以及模拟抖振载荷的窄带随机激励控制实验,对比了NAF控制器、FxLMS控制器、NAF-FxLMS控制器的收敛性和控制效果。
3.1 单频激励下的振动控制实验
开展单频激励下的垂尾振动响应控制实验,目的是检验和对比控制器的控制性能、收敛速度等特性。实验中,由压电作动器M1a对模型施加模态频率的单频正弦激励,垂尾模型一阶弯曲模态频率为10.0 Hz,一阶扭转模态频率为34.2 Hz,待垂尾处于稳态振动状态后,在第10 s开启控制器驱动压电作动器M1b工作,为了检验控制器的持续稳定性,控制时长设为30 s。
单频激励下,垂尾模型的振动加速度响应在不同控制器控制前、后的时域信号如图8~图10所示,控制效果通过控制前、后垂尾梢部加速度时域信号峰值的幅值比率表示。实验结果显示,一阶弯曲模态频率的单频激励下,FxLMS控制器的控制收敛时长约14 s,稳定后控制效果达到99%以上;NAF控制器的控制收敛时长约1 s,控制效果为57.91%;NAF-FxLMS控制器的控制收敛时长约2 s,远低于FxLMS控制器收敛时长,稳定后控制效果同样达到99%以上。一阶扭转模态频率的单频激励下,FxLMS控制器的控制收敛时长约13 s,稳定后控制效果达到99%以上;NAF控制器的控制收敛时长约1 s,控制效果为48.78%;NAF-FxLMS控制器的控制收敛时长约2 s,远低于FxLMS控制器收敛时长,稳定后控制效果也达到99%以上。
纵览厨电行业发展趋势,智能化、成套化家电大势所趋,消费者已经不仅满足于性能、功能方面的单一层面提升,成套化厨电拥有庞大的产品集群优势,通过不同厨电产品的联动帮助消费者更好的进行烹饪。例如海尔油烟机风量会随灶具火力大小变化;用户在油烟机搭载的智能大屏上选择菜谱后,烤箱会根据烹饪曲线自动开启相应烹饪模式;在烹饪结束前,消毒柜会自动开启暖盘功能。
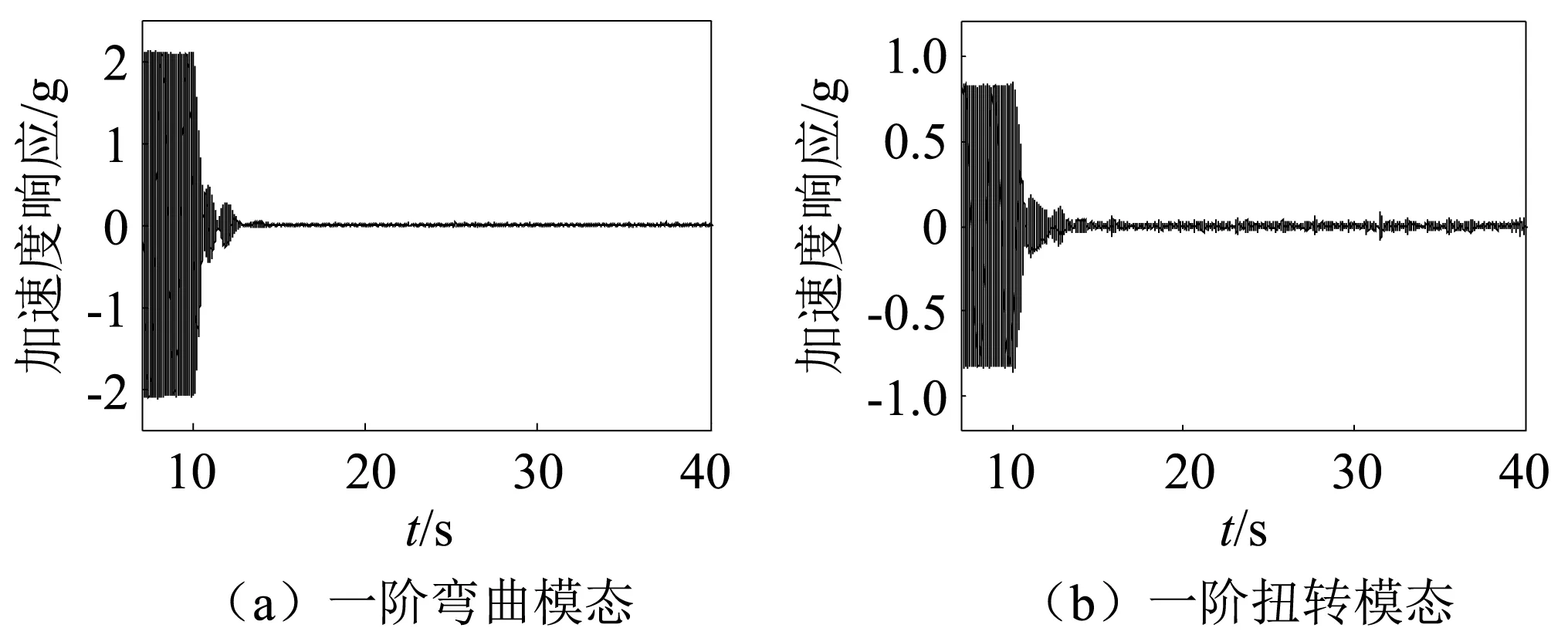
图10 单频激励下的垂尾振动响应NAF-FxLMS控制时域信号Fig.10 NAF-FxLMS control effect of vertical tail vibration response under single frequency excitation
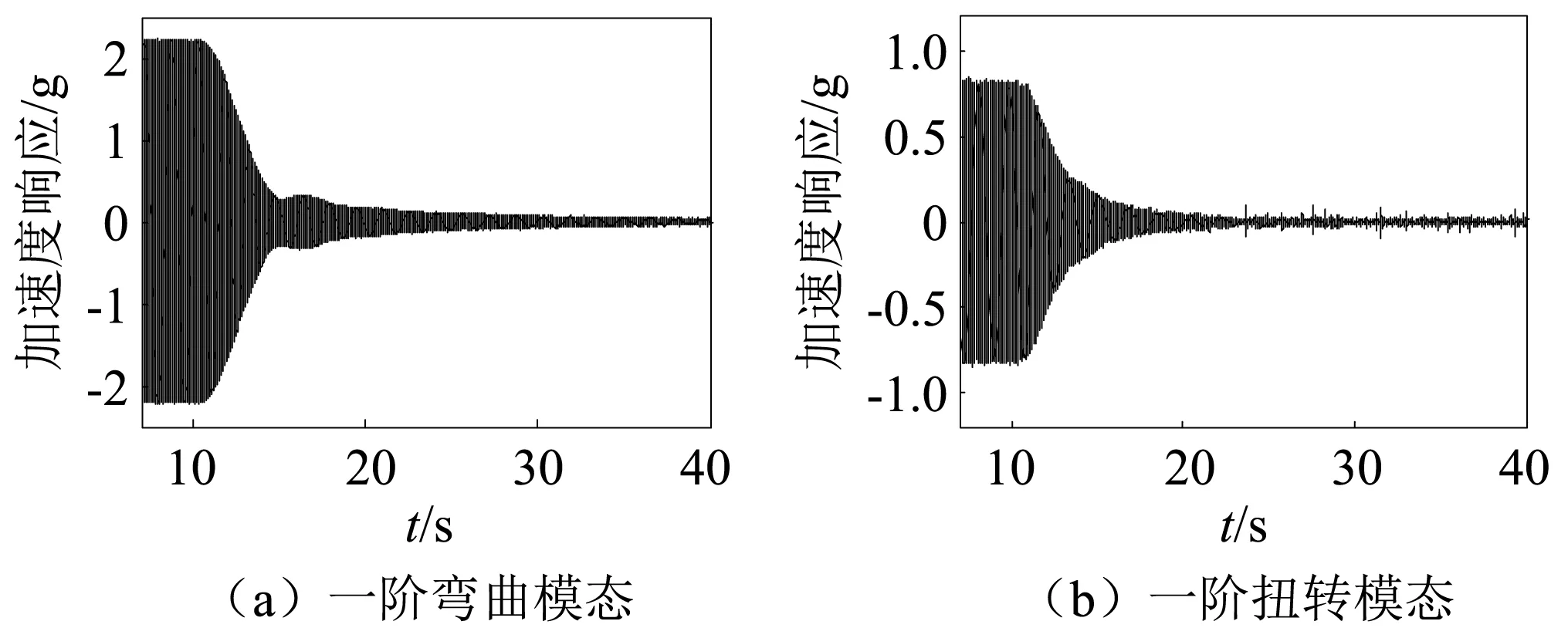
图8 单频激励下的垂尾振动响应FxLMS控制时域信号Fig.8 FxLMS control effect of vertical tail vibration response under single frequency excitation
单频激励下的振动控制实验表明,FxLMS控制器虽然可以取得很好的控制效果,但是控制收敛时间长;NAF控制器的优点是响应快,但控制器的控制效果较低;NAF-FxLMS控制器结合了二者优点,可以快速收敛达到最优控制效果。
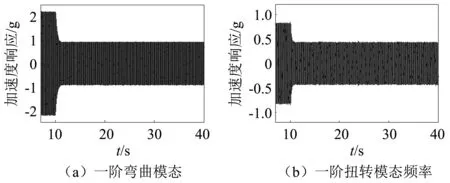
图9 单频激励下的垂尾振动响应NAF控制时域信号Fig.9 NAF control effect of vertical tail vibration response under single frequency excitation
3.2 模拟抖振载荷的窄带随机激励控制实验
垂尾抖振是由频谱覆盖垂尾结构低阶模态频率、具有窄带随机特性的脉动非定常气动力所引起一种强迫振动响应,为了检验所设计的NAF-FxLMS控制器对垂尾抖振响应的控制性能,可以用窄带随机激励模拟垂尾的抖振激励载荷,进行垂尾抖振响应的主动控制实验。进一步对比检验不同控制器对抖振响应的控制性能。窄带随机载荷的带宽为5~40 Hz,覆盖了垂尾模型结构的一阶弯曲和一阶扭转模态频率,窄带随机激励载荷信号的功率谱密度(power spectral density,PSD)如图11所示。仍然通过垂尾模型A面根部的压电作动器M1a对结构施加模拟抖振载荷的窄带随机激励,采集时长20 s的无控加速度响应信号,然后开启控制器,采集时长20 s的有控加速度响应信号。
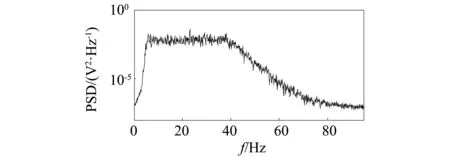
图11 5~40 Hz窄带随机信号的PSD谱Fig.11 PSD spectrum of narrowband random signal
图12~图14为无控响应和分别采用FxLMS控制、NAF控制、NAF-FxLMS控制三种控制律进行主动控制后的垂尾梢部加速度响应的PSD谱。对比看出,分别采用FxLMS控制器、NAF控制器、NAF-FxLMS控制器后,有控加速度响应PSD曲线的一阶弯曲模态频率处峰值分别降低了61.45%,81.78%,91.99%,一阶扭转模态频率处峰值分别降低了55.21%,53.76%,71.70%,相应的加速度响应均方根(root mean square,RMS)值分别降低了14.77%,24.21%,30.35%。
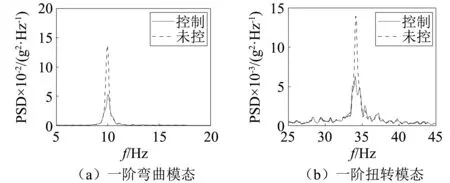
图12 FxLMS控制器的垂尾振动频域响应控制结果对比Fig.12 Comparison of vertical tail vibration control in frequency domain with FxLMS controller
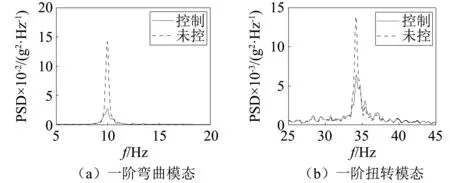
图13 NAF控制器的垂尾振动频域响应控制结果对比Fig.13 Comparison of vertical tail vibration control in frequency domain with NAF controller

图14 NAF-FxLMS控制器的垂尾振动频域响应控制结果对比Fig.14 Comparison of vertical tail vibration control in frequency domain with NAF-FxLMS controller
垂尾抖振响应主动控制的地面模拟实验结果表明,FxLMS控制器对于模拟抖振的窄带随机振动的控制效果较差,NAF控制器较好,而NAF-FxLMS控制器具有最好的控制效果。
4 结 论
(1)基于次级通道阻尼补偿原理,提出了基于NAF控制器的反馈式次级通道阻尼补偿方法,在FxLMS算法基础上,通过对误差信号的解耦,实现了NAF控制器与FxLMS控制器的结合,得到一种新的NAF-FxLMS控制器。
(2)针对垂尾结构的低阶模态抖振响应,设计了多模态的NAF-FxLMS控制器,通过垂尾模型抖振响应主动控制的地面模拟实验,验证了NAF-FxLMS控制器的控制性能优于其他两种控制器的控制性能:对单频激励下的振动控制,NAF-FxLMS控制器的控制效果达到99%以上,控制收敛时间大幅降低;对模拟抖振的窄带随机激励下的振动响应控制,采用NAF-FxLMS控制器的垂尾模型加速度响应RMS值降低30.35%。
(3)本文建立的NAF-FxLMS控制器,相对于FxLMS和NAF控制器具有收敛速度快、控制效果好的优点,在现代高性能飞行器垂尾抖振响应主动控制技术领域有很好的应用前景。
猜你喜欢
装备环境工程(2022年7期)2022-08-10
压电与声光(2019年1期)2019-02-22
测控技术(2018年11期)2018-12-07
铜仁学院学报(2018年6期)2018-07-05
西安航空学院学报(2017年3期)2017-07-05
北京航空航天大学学报(2016年2期)2016-12-01
民用飞机设计与研究(2015年3期)2015-12-07
浙江大学学报(工学版)(2015年8期)2015-03-01
科技视界(2015年15期)2015-01-16
振动、测试与诊断(2014年6期)2014-03-01
