
基于DSP的全数字永磁交流伺服系统的软件设计
2021-03-28 04:43王尚博
电子元器件与信息技术 2021年12期
王尚博
(中国电子科技集团公司第五十四研究所,河北 石家庄 050081)
0 引言
永磁伺服系统最大的优点是:能够实现准确、精确且快速的定位。与普通电动机一样,永磁伺服电动机由定子和转子2部分构成。与普通电动机所不同的是,永磁伺服电动机的内部转子是一块永磁铁,且在磁场的作用下转动。同时,编码器能够通过反馈信号把伺服信息反馈给驱动器。因此,利用永磁电动机设计全数字永磁交流伺服系统,并以DSP为平台,进行软件的详细设计,具有一定的实践应用意义[1]。
1 基本原理及概念简述
1.1 永磁交流伺服系统的基本工作原理
在自动控制系统中,伺服电动机作为基本执行元件,能够把所收到的电信号转换成电动机轴上的角位移或角速度,并通过永磁交流伺服系统输出。其主要特点是:(1)当数字信号电压为零时无自转现象,转速随着转矩的增加而匀速下降(2)无控制信号时,它不应转动,特别是当它已在转动时,如果控制信号消失,它应能立即停止转动。同时,针对全数字永磁交流伺服结构的特点,在设计其对应的驱动系统时,需要满足高速度、高精度的要求,因此,对控制算法的研究是非常重要的[2]。
1.2 DSP的概念简述
DSP具有极强的数字计算能力,利用DSP技术,开发人员可将很多新型的控制算法应用于不同的伺服控制系统之中。DSP可以作为交流伺服电机控制系统的核心,具有功耗小、性能高、运算速度快、程序存储容量大、精度高等特点,符合复杂控制伺服系统的软件开发要求。同时,DSP能够应用于现代交流伺服技术,该技术的工作特点是,采用全数字的方式,进行相关软件的设计与开发。高性能的DSP电子半导体器件中,有大量的元器件都可以被直接用于伺服控制系统。
2 基于DSP的全数字永磁交流伺服系统的软件设计
2.1 永磁交流伺服系统主程序模块设计
在进行全数字永磁交流伺服系统的软件设计时,需要考虑在伺服系统内,都有哪些工作部件需要用软件来设计。经过仔细分析后,把系统的软件设计划分为2个大部分,分别为:(1)全数字永磁交流伺服电机卡控制软件设计;(2)全数字永磁交流伺服控制器软件设计。软件开发设计时,采用当前最为流行的Visual C++软件来进行项目设计。并把全数字永磁交流伺服系统按照模块结构的不同,划分为多个不同的功能模块,然后分别以独立模块的形式来编程,并实现具体的程序功能[3]。
主程序模块,主要完成的功能是子模块的调用。在主程序模块中,要完成对子模块数据结构的定义。以PID控制器的设计为例,主程序中,要把PID控制器的存储结构体定义出来,才能保证PID控制器子模块能够在主程序的调用下,实现指定的功能。在主模块中,PID控制器的对应的结构体代码定义为:
PID控制器模块本身可以定义为一个独立的功能模块,并以独立的功能形式进行程序设计,这样,一旦PID控制器模块需要功能变动时,主模块和其他模块的程序代码不需要发生改变。
2.2 基于DSP的全数字永磁交流伺服系统仿真模型
在MATLAB的设计环境中,DSP微处理器利用永磁交流伺服系统的特点,把系统进行各种模块功能划分,建立一种交流伺服系统仿真模型,该模型采用全数字化的方式进行设计。该系统是由控制器(CTRL单元)组成的速度环和电流控制器结合起来,建立的电流环永磁交流伺服系统。
在系统内部,以电机为例,通过系统给定的永磁交流伺服电机转速与实际永磁交流伺服电机运转时转速的比较,计算出交流伺服电机运作时可能会产生的误差,然后将可能产生的误差完全以数字信号的方式,送入电机的CTRL控制器中,再由电机CTRL控制器传送,把电机的数字信号送给其所对应的转速控制模块。最后,把形成的参考电流计算出来,与PIDS实际输出电流Ia进行数据时的对比,生成PIDS的三相电压,送到PIDS并通过全数字的形式控制永磁交流伺服系统运行[4]。
其中,在本次仿真中,交流伺服系统转速控制模块滞环的宽度设为0.1,当交流伺服系统期望电流与其实际电流的误差偏大,即:误差不小于交流伺服系统转速控制模块滞环带的最小宽度时,交流伺服系统转速控制模块滞环控制器发生作用,呈现开通状态,输出值为1,当两个数据的误差小于交流伺服系统转速控制模块的最小滞环宽度时,交流伺服系统转速控制模块滞环控制器再次发生作用,呈现关闭状态,输出为0。
3 基于DSP的全数字永磁交流伺服系统MATLAB模拟仿真结果
系统的仿真采用MATLAB软件,这个软件是一个比较成熟的仿真软件。为了保证仿真结果的安全性,采用MATLAB软件是一项非常好的选择。
仿真平台选择完毕后,用它的SIMULINK链接建立永磁交流伺服系统全数字的双闭环控制的模型。在仿真过程中,PIDS的参数设定如下:(1)伺服系统电机的额定电压为220V;(2)伺服系统额定电流为3A;(3)伺服系统额定机械转速为1500rpm;(4)伺服系统极对数为2;(5)伺服系统输出功率为1KW;(6)伺服系统阻抗4.3Ω;(6)伺服系统直、交轴感抗为(0.027H,0.067H)。同时,为了计算最优情况下的伺服模型,设置其对应的摩擦系数B=0。
以此方法实现的模型,是一种新的电压变、电流控制方法,在此基础上,对双闭环模型进行MATLAB仿真[5]。永磁同步电机在开环的运行形式下,得到的转矩、电流、转速的波形,通过波形的分析,获取开环运行的条件下,全数字永磁交流伺服系统的双闭环I电流曲线图,如图1所示:
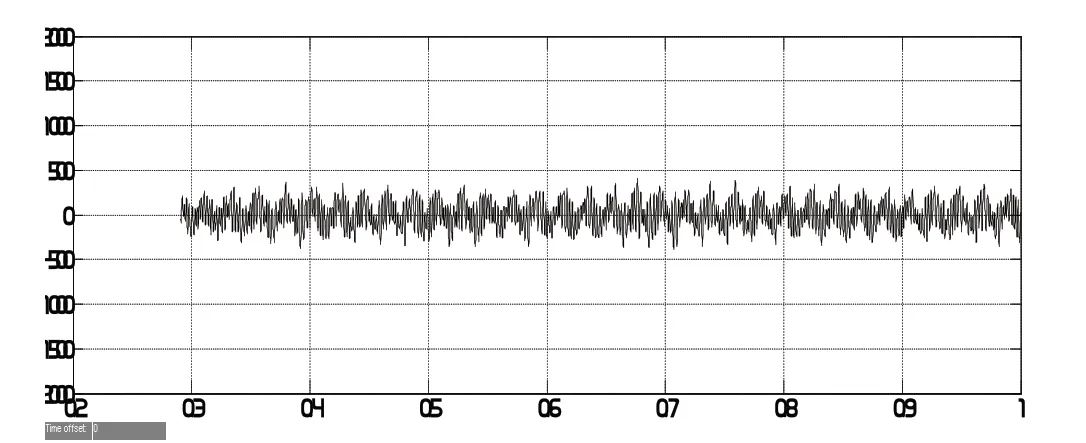
图1 全数字永磁交流伺服系统的双闭环I 电流曲线图
4 结语
要设计一款一种基于DSP的全数字永磁交流伺服系统,首先需要从硬件和软件两个不同的角度来分析系统的功能,然后再进行设计。与硬件结构相比,软件的功能强大,且看不到摸不到,必须由专业的程序设计人员来完成。软件设计过程中,目前在设计行业中,采用得最多、也最有效的方法就是模块化结构划分方法。在本课题中,把永磁交流伺服系统通过数字化DSP设计法进行设计,然后按照功能的不同,根据控制功能模块的控制内容进行划分,再把划分出来的不同模块分别开来,进行程序设计、系统仿真等工作,最终把各个功能模块进行功能整合,实现主模块设计,并让主模块通过系统MATLAB仿真进行测试,由测试的结果证明程序的有效性。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
上海大中型电机(2021年2期)2021-07-21
微特电机(2020年11期)2020-12-30
防爆电机(2020年6期)2020-12-14
测控技术(2018年12期)2018-11-25
电子制作(2018年17期)2018-09-28
通信电源技术(2018年3期)2018-06-26
工业设计(2016年6期)2016-04-17
北京航空航天大学学报(2016年4期)2016-02-27
弹箭与制导学报(2015年1期)2015-03-11
