新型大位移非对称微夹钳设计*
2021-03-26 04:35陈晓东胡思雅邓子龙高兴军
传感器与微系统 2021年3期
陈晓东, 胡思雅, 邓子龙, 高兴军
(辽宁石油化工大学 机械工程学院,辽宁 抚顺 113001)
0 引 言
近年来,随着微机电系统(micro-electro-mechanical system,MEMS)等高新科技的快速发展,微操作的研究取得了巨大进步[1]。在生命科学[2]、汽车工业、信息通讯[3]、精密加工[4]、航天航空[5]等领域有着广泛的应用。微夹钳作为微操作的末端执行器,与接触物直接接触,决定着微操作任务是否成功。
扩大夹持位移是微夹钳研究的关键问题。现今,扩大夹持位移主要用过微位移放大机构完成,常用的微位移放大机构主要有杠杆放大机构、桥式放大机构和菱形放大机构[6]。杠杆放大机构结构简单、易于实现,但输出位移较小且结构不够紧凑;桥式放大机构和菱形放大机构输出位移大,将压电陶瓷置于机构内部,具有结构紧凑的效果。单一的杠杆放大机构、桥式放大机构和菱形放大机构称为单级放大机构,由多个单级放大机构组成的放大机构称为多级放大机构。多级放大机构可以进一步扩大微夹钳的夹持行程,提高放大倍数[7]。Cui Y G等人[8]基于杠杆放大原理设计的对称微夹钳可以实现平行夹持,实际最大夹持力分别为8.02 mN和9.24 mN,左右钳指的实际最大夹持力均不同,很容易破坏薄壁易破损夹持物;Koo B W等人[9]基于杠杆放大原理设计的非对称微夹钳,实现二自由度夹持,但不能平行夹持,影响夹持精度;Zubir M N M等人[10]基于杠杆放大原理设计的对称微夹钳,实现3.68倍位移放大,通过理论分析证实了左右钳指的双向对称输出力相同,但在实际夹持过程中,很难满足左右钳指输出力相同的要求。Ai W和Xu Q[11]基于杠杆放大原理与桥式放大原理设计的对称放大微夹钳,理论放大倍数为12.6倍;Sun X等人[12]基于杠杆放大原理与桥式放大原理设计的多级放大微夹钳,实际放大倍数为16.4倍;文献[11,12]设计的微夹钳同时具有放大倍率高的优点,但不能实现稳定夹持。
综上所述,有必要设计一种放大倍率高、结构紧凑的大位移压电微夹钳,本文设计的微夹钳结构紧凑、仿真放大倍率为11.56。
1 模型设计
图1为微夹钳平面图,机构的尺寸为46.50 mm×45.12 mm×5 mm。微夹持机构主要由直圆形柔性铰链、直片形柔性铰链、钳指、杠杆放大机构、菱形放大机构、螺纹固定孔、预紧螺栓组成。
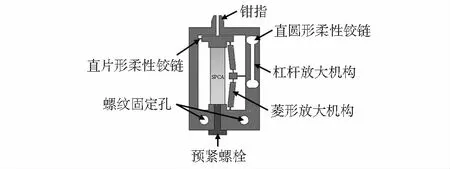
图1 微夹钳平面图
取微夹钳右半部分进行分析,其伪刚体模型如图2所示,xin,xout分别压电陶瓷的输入位移和微夹钳指的输出位移,机构的主要尺寸如表1所示。连杆机构ABC可视为曲柄滑块机构,如图3所示。曲柄滑块机构在运动过程中,Y轴,X轴方向的变形量分别为ΔBy,ΔAx。存在如下关系
(1)
vAx=wABlOA
(2)
vBy=vBcosθ=wABlOBcosθ
(3)
因连杆AB的长度等于连杆BC的长度,将式(2)、式(3)代入式(1),得出曲柄滑块机构的位移放大比为
(4)
则微夹钳的理论放大比为
(5)
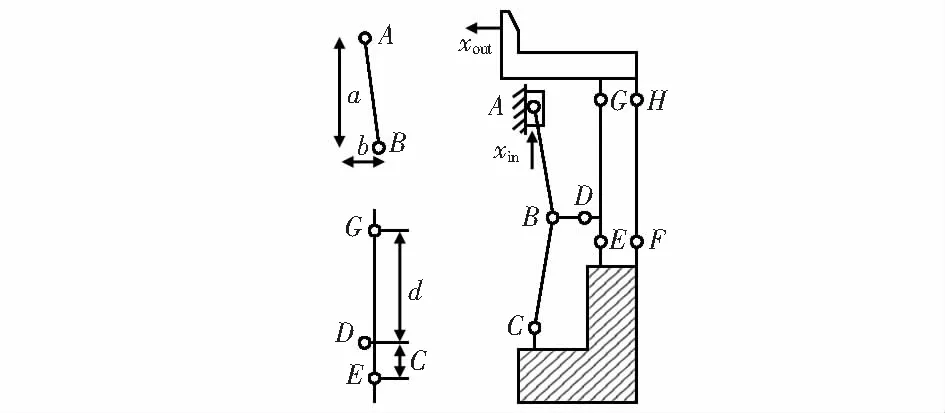
图2 微夹钳PRBM

表1 机构主要尺寸

图3 曲柄滑块机构
2 仿真分析
微夹钳设计参数如下:
1)微夹钳选用材料为7075铝合金,弹性模量E=71 GPa,泊松比ν=0.33,屈服强度σ=455 MPa,密度ρ=2 810 kg/m3。
2)微夹钳钳体厚度为5 mm。
图4(a),(b)为微夹持器在输入端施加20 μm输入位移作用下,未夹持零件时对应的位移云图和应力云图。如图4(a)所示,在20 μm输入位移作用下,钳指单边输出位移为231.14 μm,仿真放大倍率为11.56倍且能实现平行夹持;在最大输出位移作用下,微夹钳最薄弱处所受的最大压强为227.94。小于材料的屈服强度,产品可以安全使用。
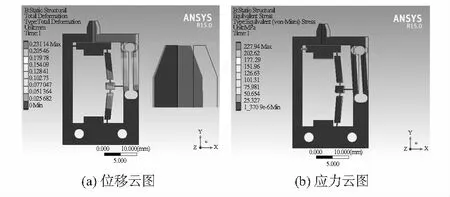
图4 微夹钳位移、应力分析
图5为压电陶瓷输入位移与钳指输出位移之间的关系,压电陶瓷输入位移与钳指输出位移具有线性关系,表明微夹钳性能稳定。理论值与仿真值相比,得出误差为6.32 %,这主要归因于二级放大机构对单级放大机构有一定的抑制作用。
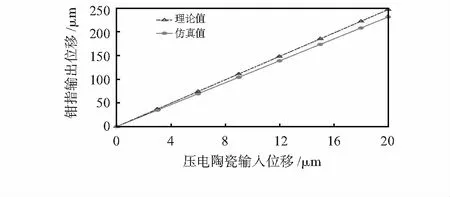
图5 压电陶瓷输入位移与钳指输出位移关系
3 结 论
针对传统对称微夹钳与传统非对称微夹钳的缺点,设计一种大大位移非对称微夹钳。同时具备对称微夹钳输出位移大与非对称微夹钳钳指夹持性能稳定的特点。分别通过理论计算与仿真分析得出输入位移与输出位移之间的关系,得出误差为6.32 %,在误差允许的范围内,证实了设计的正确性。
猜你喜欢
锻压装备与制造技术(2022年1期)2022-03-24
装备制造技术(2020年2期)2020-12-14
石材(2020年7期)2020-08-24
航天电子对抗(2019年4期)2019-06-02
中国特种设备安全(2019年2期)2019-04-22
数学年刊A辑(中文版)(2018年2期)2019-01-08
制造技术与机床(2018年11期)2018-11-23
电子制作(2018年17期)2018-09-28
专用汽车(2016年4期)2016-03-01
电测与仪表(2015年4期)2015-04-12