
基于无人驾驶汽车的线控制动装置的设计与控制
2021-03-26 03:29罗洋坤
电子元器件与信息技术 2021年11期
罗洋坤
(湖南汽车工程职业学院,湖南 株洲 412000)
1 引言
无人驾驶汽车利用智能传感器技术、定位导航技术、通信技术等通过计算机依据所获取的道路信息、车辆位置信息和障碍物信息做出分析和判断,并向底盘线控执行机构发送控制指令来控制车辆速度和转向[1-2]。其中车辆速度包括加速、减速、制动控制操作,是无人驾驶汽车线控技术最难的一部分。当前线控制动技术已成为智能汽车行业发展的主流,为汽车产业的发展带来新的方向。目前线控制动控制技术主要包括有电子机械线控制动和液压式线控制动控制[3]。采用的线控技术路线是将电子系统和液压系统相结合,是新一代机电一体化线控系统,改变了原车制动系统的结构,其控制方法和策略更为复杂。如大陆公司(Continental)的电子液压制动系统MKC1,将制动助力结构与液压控制单元集成为一体[4]。博世公司成功开发出iBooster系统,采用机电伺服助力机构,是刹车控制系统的集合[5]。袁莉对汽车线控制动操纵系统进行了设计与研究,设计开发了一种新型电动制动装置,该装置结构简单、工作可靠、性能稳定、控制准确[6]。孙惠萍通过线控技术设计了一款线控制动踏板装置,对其结构和控制进行了仿真和分析[7]。在国内清华大学、吉林大学等高校学者对线控制动理论及控制提出了新的方法。通过参考以上文献资料,本线控制动装置的研究及设计提出了新的技术路线,在原车制动器的基础上加装一套线控制动的电子控制机械机构,既不影响原车制动系统结构和制动功能,又能通过该装置实现线控制动控制。对比现有的线控制动技术,该装置设计结构简单、性能稳定可靠,为智能汽车线控技术开拓了新思路[8]。
2 线控制动装置设计
2.1 线控制动装置结构设计
无人驾驶汽车线控制动装置在没有改变原车制动系统的情况下,采用步进电机驱动蜗杆传动、蜗杆带动蜗轮转动、蜗轮带动齿套运动、齿套带动推杆运动来实现制动过程。其结构设计主要包括制动踏板机构、真空助力装置(包括制动阀推杆)、活动齿套外罩、活动驱动齿套、步进电机、蜗杆传动装置(包括蜗杆、涡轮)、涡轮限位块、涡轮限位腔组成,如图1所示。
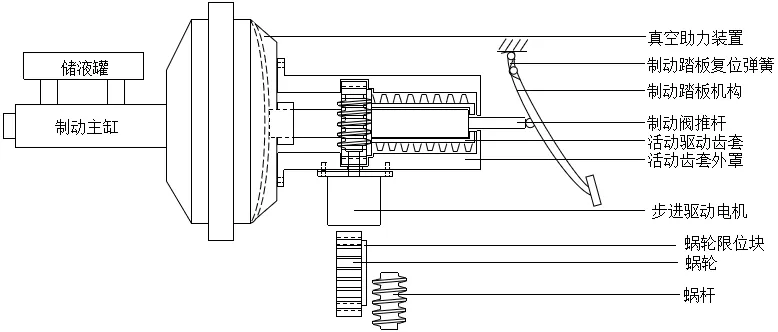
图1 线控制动装置结构及名称图
2.2 线控制动控制电路设计
线控制动控制电路主要由电源转换电路、主控电路、CAN通信转换电路、电机驱动电路等,如图2所示。
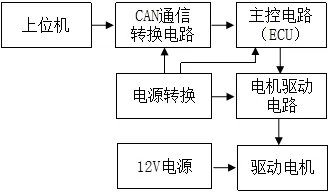
图2 线控制动控制电路方框图
电源转换采用开关稳压器LM22676实现高效高压降压稳压器,为主控芯片、电机驱动电路、CAN接口电路提供DC5V电源。主控电路选用AT90CAN64主控芯片,根据线控制动装置功能和要求,编写程序来控制步进电机驱动电路,同时通过CAN总线与上位机进行通信。电机驱动电路由电桥驱动控制芯片BTN8982和单路反相器组成,采用PWM技术控制步进电机顺时针/逆时针来驱动蜗杆传动机构运动实现线控制动控制。CAN转换电路接收来自上位机CAN信号,将TXD、RXD信号转换为CAN规范差分信号输出至主控电路。
3 线控制动装置工作原理及控制
3.1 线控制动装置制动工作原理及控制
(1)线控制动过程。车辆进入自动驾驶状态,上位机通过CAN总线送指令给ECU控制器,ECU控制器根据报文信息驱动线控制动装置步进电机正转,步进驱动电机驱动蜗杆在同平面旋转。涡轮的蜗轮限位块与固定罩的涡轮限位腔相互限位,固定涡轮旋转和上下位置,保持原位状态。蜗杆顺时针旋转,带动涡轮原位垂直向上原位旋转,涡轮的蜗轮内齿旋转驱动齿套向左移动,同步带动推杆克服复位弹簧的阻力左移实现自动线控制动,如图3所示。

图3 线控制动装置制动示意图
(2)线控解除制动过程。当车辆在无人驾驶中需要解除线控制动时,ECU控制器根据报文信息驱动线控制动装置步进电机反转,步进电机同步驱动蜗杆传动装置带动涡轮原位垂直向下旋转,逆齿轮等速驱动齿条套向右移动。涡轮上的限位块与涡轮限位腔相互限位,固定涡轮旋转和上下位置,保持原位状态。蜗杆逆时针旋转,带动涡轮原位垂直向上原位旋转,同步涡轮内螺纹齿轮旋转驱动活动驱动齿套向右移动,同步带动阀推杆在复位弹簧的作用力下向右移动实现解除线控制动,如图4所示。
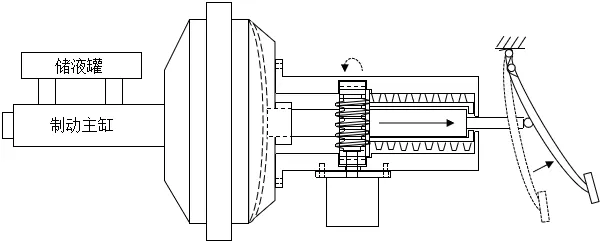
图4 线控制动装置解除制动示意图
3.2 线控制动装置自锁原理
无人驾驶中车辆随时需要减速或制动,则需要线控制动机构动作时精准、稳定、可靠。由于蜗轮与蜗杆传动两轴交叉成90度,相互不平行不相交,其蜗轮力矩传动是通过摩擦方式实现,蜗杆是主动件,蜗轮是被动件。当蜗轮与蜗杆摩擦角Φ较小时,蜗杆停止转动,蜗轮则给蜗杆一个反向滑力,不能使蜗杆反向转动,实现蜗杆自锁,摩擦角越小,自锁能力越强[9-10],如图5所示。

图5 线控制动装置自锁示意图
4 线控制动装置电路工作原理及控制
无人驾驶汽车上位机对智能传感器采取的环境信息进行处理,并依据信息结果进行决策判断,确定合适的控制策略来控制车辆实现自动驾驶[11-12]。自动驾驶核心环节是线控制动,根据设计的线控制动装置结构及原理,其控制过程是上位机通过CAN总线发送指令至CAN接口转换电路,接口与本装置的控制单元连接,控制单元的输出与步进电机驱动单元的输入连接,驱动单元的输出与传动单元的输入连接。其工作原理是ECU获取CAN转换电路的差分信号,由主控芯片AT90CAN64的PB4端口输出MOTO_EN信号,PB5端口同时输出MOTO_PWM信号至单路反相器SN74LVC1G04输入端、电桥驱动控制芯片BTN8982-Q1;电桥驱动控制芯片Q1检测到 MOTO_EN使能信号和MOTO_PWM信号时,驱动步进电机顺时针驱动蜗杆传动机构旋转实现自动制动。当电桥驱动控制芯片BTN8982-Q2检测到MOTO_EN使能信号,同时检测到单路反相器SN74LVC1G04将MOTO_PWM信号反相后输出MOTO_PWM_R信号时,驱动步进电机逆时针驱动蜗杆传动机构旋转实现自动解除制动,如图6所示。

图6 线控制动装置电路控制方框图
5 结语
随着线控制动技术不断发展与完善,已逐渐成为汽车新技术发展的主流。相较于传统制动方式,线控制动技术有着不可替代的优势。线控制动装置的设计是基于在原车制动装置的基础上进行改装,通过在真空助力泵与制动阀推杆之间改造加装步进电机和蜗杆传动装置,其设计简单安全可靠,既保障了原车制动器的功能,又能实现线控制动,提高了无人驾驶汽车的安全性、稳定性和可操纵性。本线控制动装置的设计为无人驾驶汽车线控制动提出了新的技术路线,为线控制动技术的实践与应用研究提供积极的借鉴作用。
猜你喜欢
汽车之友(2021年23期)2021-12-24
微特电机(2021年6期)2021-03-07
陕西理工大学学报(自然科学版)(2020年6期)2021-01-15
装备制造技术(2020年4期)2020-12-25
设备管理与维修(2020年20期)2020-11-17
中国特种设备安全(2019年8期)2019-10-14
机械工程师(2018年1期)2018-12-29
电子制作(2018年9期)2018-08-04
汽车工程师(2018年3期)2018-07-12
组合机床与自动化加工技术(2018年3期)2018-04-03
