基于模拟多曝光融合的低照度全景图像增强
2021-03-25 12:23王殿伟邢质斌韩鹏飞任新成
光学精密工程 2021年2期
王殿伟,邢质斌*,韩鹏飞,刘 颖,姜 静,任新成
(1.西安邮电大学通信与信息工程学院,陕西西安710121;2.西湖大学工学院人工智能研究与创新中心,浙江杭州310024;3.延安大学物理与电子信息学院,陕西延安716000)
1 引 言
全景图像是一种采用广角的表现手段以新视角来展示周围世界的全新方式,能够尽可能多地展示周围的所有景致,因此受到越来越多关注。在夜晚、阴影等光照不良条件下采集的全景图像质量会变差,主要表现在图像整体亮度不均匀、对比度偏低和颜色偏暗等方面,对于全景图像的视觉效果影响严重,并为后续的计算机视觉处理任务(比如图像分割、目标跟踪、目标识别等)带来一定难度[1-2]。因此,开展低照度全景图像增强算法研究对于机器视觉领域具有非常重要的意义。
目前低照度图像增强算法主要有直方图均衡化类方法、基于Retinex理论的方法、基于深度学习的方法以及图像融合类算法等。基于直方图均衡化类算法[3-5]对于整体亮度偏低或偏高的图像具有较好的增强效果,因其具有算法复杂度低等优点得到了广泛应用,但容易出现过度增强、偏色等现象。Retinex理论把一幅图像分解为光照分量与反射分量,然后将处理后的光照分量和反射分量相结合得到增强图像[6]。例如,Wang等[7]提出了一种光照不均匀图像自然性保持的增强 算 法(Naturalness Preserved Enhancement,NPE),该算法能够较好地保持图像的自然度;Guo等[8]提出了一种基于照度图估计的低光照图像增强处理算法(Low-light Image Enhancement,LIME),能够显著提高图像的亮度与对比度;Fu等[9]提出了一种加权变分模型,以同时估计图像的光照分量与反射分量,该算法能够在抑制噪声的同时提升图像亮度;Li等[10]提出了一种新型的基于Rtinex理论的低照度图像增强算法,该方法在考虑图像噪声的同时,通过求解一个最优化问题估计光照分量。上述算法均是仅利用单一的低照度图像作为输入,虽然能够取得较好的增强效果,但是单张低照度图像中所蕴涵的有效信息毕竟有限,导致这些算法无法有效地展示图像中所有的细节。因此,为能充分利用自然图像中所蕴含的先验信息来提高图像的增强效果,基于深度学习的低照度图像增强算法成逐渐为热点,例如,Lore等[11]利用深度堆栈稀疏自编码器构建了一种新的低照度图像增强网络;RetinexNet[12]结合Retinex理论和卷积神经网络估计图像的光照分量和反射分量,并通过分别处理照分量和反射分量得到增强图像;Cai等[13]提出了一种通过卷积神经网络学习单幅图像与高动态范围图像之间映射关系的算法;Wang等[14]提出了一种基于光照分量估计的低照度图像增强网络;Yang等[15]提出了一种新的半监督学习方法用于低照度图像增强。虽然这些基于深度学习的方法能够获得较好的增强效果,但其性能仍然在一定程度上受到限制,其主要原因是采集用于训练模型的图像数据集比较困难。
近年来,人们受HDR技术(将同一场景下拍摄的一组不同曝光率的图像,通过图像融合算法获得高质量输出图像)启发,基于给定的低照度图像以及基于它生成的多张不同曝光程度的图像,通过将它们之间互补性的图像信息融合在一起,以获得更加鲁棒的增强效果,是研究低照度图像增强算法的新方向之一[16-18]。例如,Fu等[16]提出了一种基于多个光照分量融合的低照度图像增强算法,该算法在提升图像可视化效果的同时较好地保持了图像自然度,但是该算法输出的增强图像中某些区域的可见性仍然不够高;Liu等[17]提出了一种基于细节保持的多曝光图像融合算法,使增强后的图像有较好的颜色保真效果,同时也保留了低曝光图像中的一些细节,但是处理曝光率非常低的图像仍无法取得令人满意的效果;Ying等[18]提出了一种基于多曝光生成再融合框架的低照度图像增强算法(BIMEF),首先基于图像信息熵最大化原则,利用相机响应模型处理低照度图像得到一张适度曝光图像,然后根据图像像素亮度值设置权重将低照度图像和适度曝光图像两张图像在像素级上完成融合。BIMEF算法实现效率高且增强效果不错,然而BIMEF算法仅采用一张曝光适度的伪曝光图像作为低照度图像的互补图像,所能提供的有用信息仍然不够全面,在适度曝光的图像中,仍然存在曝光不充分的区域需要增强,故为了更好地提升图像增强效果,应该使用更多图像参与融合。
为了克服上述方法的不足,本文提出一种基于模拟多曝光融合的低照度全景图像增强算法,在提升图像对比度的同时能够有效地恢复暗区细节,避免图像颜色失真问题。本文主要贡献包括以下两方面:(1)在待融合图像生成阶段,为了获得更好且与低照度全景图像具有互补性的图像,采用曝光插值法合成中等曝光图像参与融合;(2)在融合阶段,设计了一种新的亮度权重函数用于多尺度融合策略。
2 基于融合的低照度图像增强算法
为提高低照度全景图像的可视化质量,解决低照度条件下采集到的全景图像亮度弱、低对比度及细节信息不清晰等问题,本文提出了一种基于模拟多曝光融合的低照度全景图像增强算法,算法流程图如图1所示。
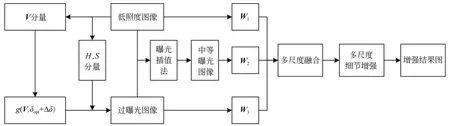
图1 本文算法流程Fig.1 Proposed algorithm flow
由图1可知,本文算法主要包含:过曝光图像生成,中等曝光图像生成,多尺度融合以及多尺度细节增强4个模块。首先,将低照度全景图像E1由RGB颜色空间转换到HSV颜色空间;然后采用亮度映射函数对V分量进行虚拟曝光;最后,将处理后的V分量和保持不变的H和S分量重新合成HSV图像,并将其转回RGB颜色空间作为过曝光图像E3;将低照度图像E1和生成的过曝光图像E3作为输入,利用曝光插值法生成中等曝光图像E2参与融合,一方面能够较好地提升图像的亮度与对比度,另一方面可有效地避免由于一对多映射导致的虚拟曝光图像中的颜色失真问题;为了将低照度全景图像及生成的多个不同曝光率图像中的互补性信息进行最佳融合以获得更为鲁棒的视觉增强效果,本文提出一种新的亮度权重函数,并采用多尺度融合策略将低照度图像E1、中等曝光图像E2和过曝光图像E3进行融合;通过多尺度细节增强算法对融合后的图像进行细节增强,得到最终的增强图像。
2.1 过曝光图像生成
为了提高低照度全景图像的可视化质量,需要生成不同的虚拟曝光图像并进行曝光融合。首先,将图像质量指标(信息熵)作为度量确定低照度图像的最佳曝光率δopt,通过最佳曝光率[18]提高曝光不足的像素亮度,本文利用式(1)过滤得到曝光不足的像素灰度值集合:

其中:V(x)表示低照度图像E1的亮度分量V;τ为区分曝光不足像素的灰度阈值,本文中取值为0.5。则曝光不足的像素点的信息熵为:

式中pi为Q中每个灰度等级i出现的概率。
接着,利用图像信息熵最大化原则求解出的最佳曝光率可表示为:

式中g(·)为亮度映射函数,其表达式为:

式中δ是曝光率,根据文献[17],a和b是常数,a=-0.329 3,b=1.152 8。
然后,基于得到的最佳曝光率δopt,利用亮度映射函数对低照度图像E1的亮度分量V进行虚拟曝光处理,得到处理后的V分量:

式中:g(·)为亮度映射函数,Δδ为曝光率变化量(本文Δδ取值为1)。
最后,将处理后的V分量和保持不变的H和S分量重新合成HSV图像,并将其转回RGB颜色空间作为过曝光图像E3。
2.2 中等曝光图像生成
如果仅采用一张过曝光图像作为低照度图像的互补图像用于图像融合,所能提供的有效信息十分受限,难以获得较为理想的增强效果,比如当低照度图像中的明亮区域比过曝光图像中的阴影区域暗时,很难对所有像素适当地定义权重来保持相对亮度。为解决这一问题,Yang等[19]提出一种新的图像融合算法(MSF),通过对不同曝光程度的图像进行融合,有效避免了由于一对多映射而导致的虚拟曝光图像中可能出现的颜色失真问题。
受MSF算法启发,本文以低照度图像和生成的过曝光图像为输入,采用曝光插值法生成中等曝光图像参与融合。
首先,利用式(6)计算中等曝光图像的曝光时间,假设同一场景的低照度图像E1(p)和过曝光图像E3(p)的曝光时间分别为Δt1和Δt3(Δt3>Δt1),则中等曝光图像的曝光时间Δt2定义式如下:

然后,需要确定中等曝光图像与两个不同曝光图像之间的关系。假设g32(·)表示过曝光图像E3(p)与中等曝光图像E2(p)之间的亮度映射函数,g12(·)表示低照度图像E1(p)与中等曝光图像E2(p)之间的亮度映射函数,则g32(·)和g12(·)定义为:
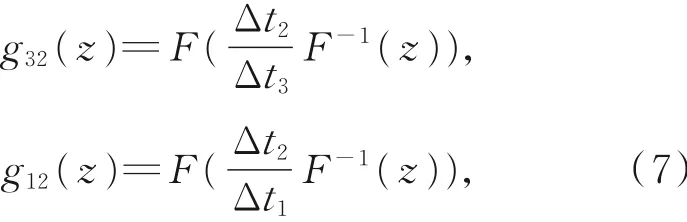
式中F(·)表示相机响应函数。
在确定了中等曝光图像与两个不同曝光图像之间的关系之后,以低照度图像和过曝光图像作为输入数据,利用式(7)生成两个具有相同曝光时间的中间虚拟图像:

最后,通过加权融合算法将生成的两个中间虚拟图像进行融合得到中等曝光图像:

这里权重函数w1和w2分别定义为:
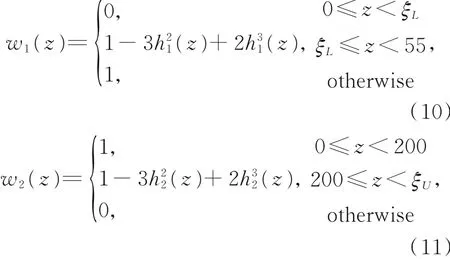
其中:ξL和ξU为常数,h1(z)和h2(z)定义为:

2.3 多尺度融合
为了获得更好的图像增强效果,本文采用多尺度融合策略对低照度图像、中等曝光图像和过曝光图像进行融合,融合框架可表示为:

式中:Yl和Ll分别表示第l层的高斯金字塔与第l层的拉普拉斯/金字塔为归一化权重,E1,E2和E3分别为低照度图像、中等曝光图像和过度曝光图像,经过大量不同场景的实验表明,5层金字塔分解通常会取得最好的效果,因此本文l取值为5。本文用上述方法,对一幅低照度图像生成了中等曝光和过曝光图像,结果如图2所示。
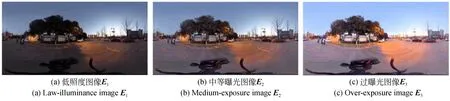
图2 本文方法生成的多曝光图像Fig.2 Multi-exposure images generated by the proposed method
如图2(a)~(c)所示,E1,E2和E3分别是低照度图像,以及本文方法生成的中等曝光图像和过度曝光图像。对于低照度图像E1而言,希望其能在保留图像中曝光良好区域的同时,有效地增强图像中曝光不良的区域;而相比于E1和E2,过曝光图像E3在损失了图像细节的同时却能展示更多有效的图像内容信息,为此,本文采用基于光照分量的Sigmoid函数对E1和E3进行权重设置。由大量的统计数据可知,曝光良好图像的像素值分布近似满足均值为0.5,方差为0.25的高斯分布,因此我们利用高斯分布函数设置中等曝光图像E2的权重。为了平衡高斯分布函数和Sigmoid函数,本文提出了一种的改进的亮度权重函数,其定义式如下:
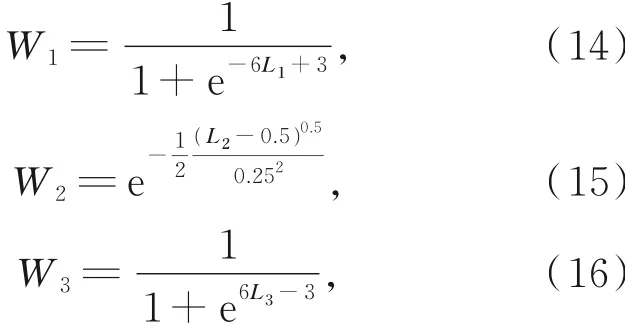
式中L1,L2和L3分别表示E1,E2和E3的光照分量。为了得到光照分量,本文将图像E1,Ε2,E3从RGB色彩空间转到HSV颜色空间,并获取图像的亮度分量V,然后采用可以保持图像边缘的加权最小二乘滤波器(Weighted Least Square,WLS)[20]对V分量进行平滑滤波处理以获得光照分量。本文构建的三个亮度权重函数的曲线如图3所示(彩图见期刊电子版)。
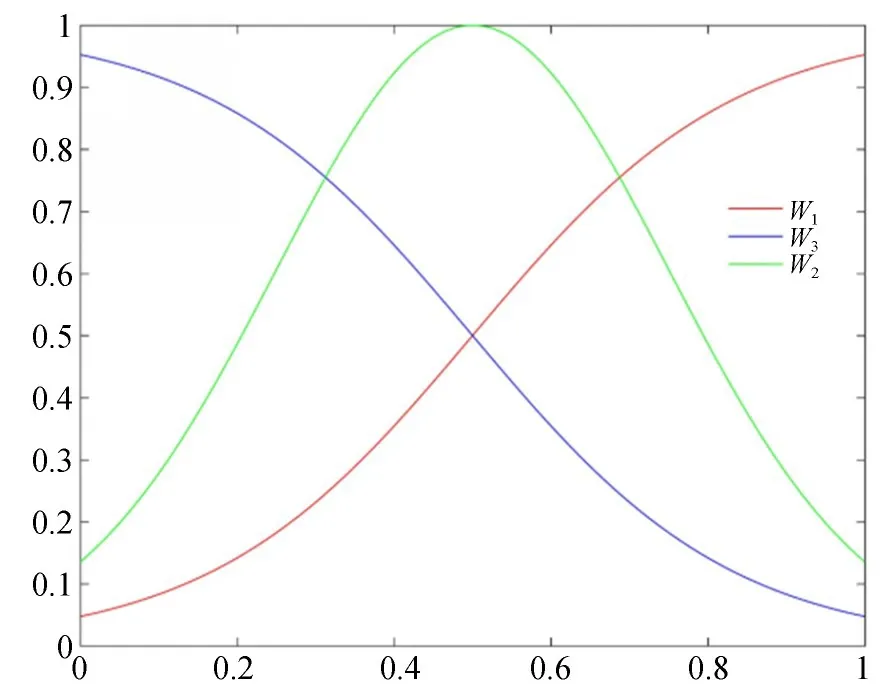
图3 亮度权重函数Fig.3 Weight function
在图3中,横坐标为图像的光照分量,纵坐标为权重,红、绿、蓝三条曲线分别代表低照度图像、中等曝光图像和过曝光图像的亮度权重函数(彩图见期刊电子版)。通过为三个不同曝光程度图像的像素值合理地分配权重,使融合后的图像在增强亮度和避免过度曝光之间达到了很好的平衡。
2.4 多尺度细节增强
在对图像进行高斯-拉普拉斯金字塔分解和重建的过程中,随着金字塔层数的增加,会丢失部分图像细节,而减少金字塔的层数会导致在融合结果中产生光晕伪影[21]。为使图像细节信息更加丰富,本文采用一种多尺度高斯滤波算法,在增强图像细节的同时避免产生光晕伪影。
首先采用多尺度高斯滤波器对融合后的图像进行平滑滤波,获得3个不同的高斯模糊图像,如式(17)所示:

其中:G1,G2和G3分别是标准差为σ1=1.0,σ2=2.0 和σ3=4.0的高斯核。
其次针对图像提取精细细节D1,中间细节D2和粗细节D3,如式(18)所示:

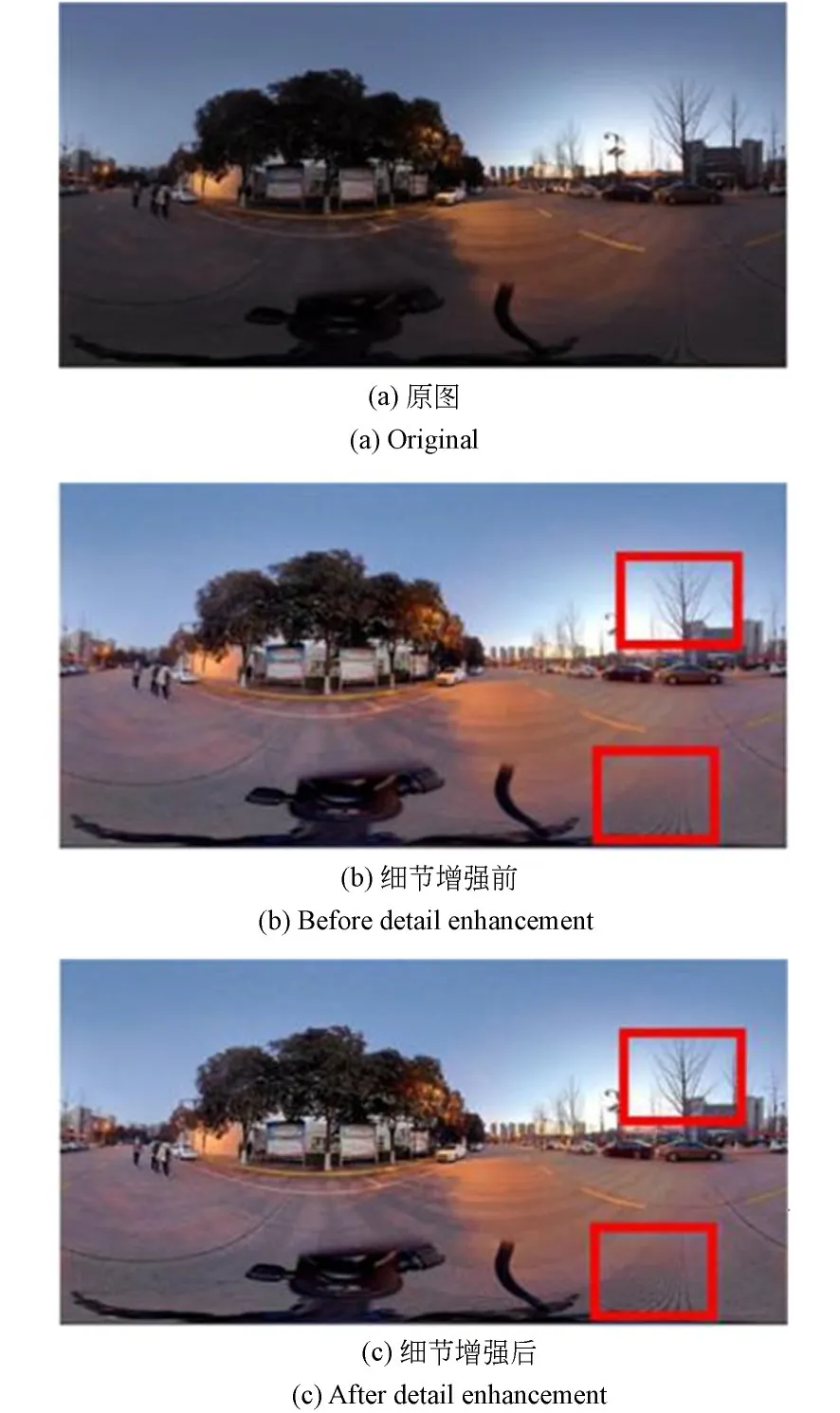
图4 多尺度细节增强的对比Fig.4 Comparison of multi-scale detail enhancement
然后将D1,D2和D3进行加权融合得到细节图像D*,如式(19)所示:

其中:w1,w2和w3为权重系数,取值分别为0.5,0.5和0.25。最后,将细节图像D*与融合后的图像I*结合在一起,得到最终的增强图像。细节增强前后的实验结果如图4所示(彩图见期刊电子版)。
由图4(b)和图4(c)中红色框区域可以看出,经过多尺度细节增强处理后的图像中地面防滑纹以及树枝的纹理细节比处理前的图像更加清晰。
3 实验结果与分析
为了验证本文算法在低照度全景图像增强上的效果,本文选取6种不同场景下的低照度全景图像进行实验,分别使用NPE算法[7]、LIME算法[8]、SRIE算法[9]、Li算法[10]、BIMEF算法[18]、RetinexNet算法[12]以及本文算法分别进行处理,对实验结果进行对比与分析,如图5~图12所示。
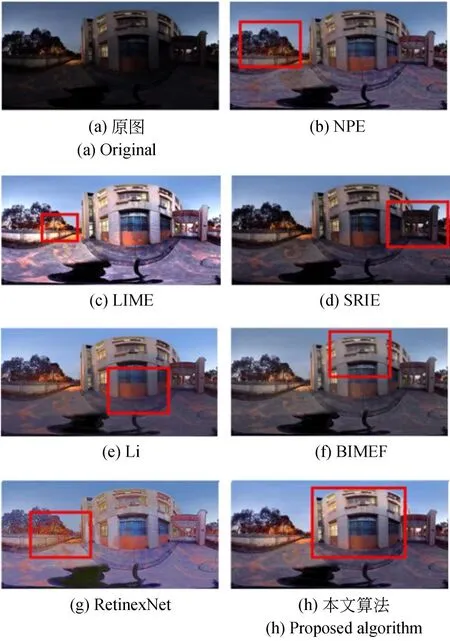
图5 傍晚时分实验楼全景图像不同增强算法处理结果Fig.5 Results of different enhancement algorithms for the panoramic image
由图5可知,相比于原图像,NPE算法和SRIE算法处理后的全景图像达到了一定的增强效果,但对于整体亮度很低的图像,它们的恢复效果仍然不够明显,如图5(b)和图5(d)中红色框区域,增强后图像的部分区域仍存在亮度偏低的问题;由图5(c)中红色框区可知,对于灯光区域,LIME算法处理后的结果存在亮度和颜色失真现象;而通过观察图5(e)中红色框区域可以现,对于较暗区域(窗户与墙壁),Li算法处理后结果的图像细节不够清晰;BIMEF算法对图像的亮度提升效果较好,但是处理后图像的颜色不够自然,如图5(f)红色框区域中墙壁颜色偏灰暗;而图5(g)所示方法结果图像的视觉效果较差,如图5(g)红色框区域中树枝与地面的光晕伪影比较严重,而本文算法处理后的图像在提升了亮度的同时保留了更多的细节信息,具有更好的视觉效果(彩图见期刊电子版)。
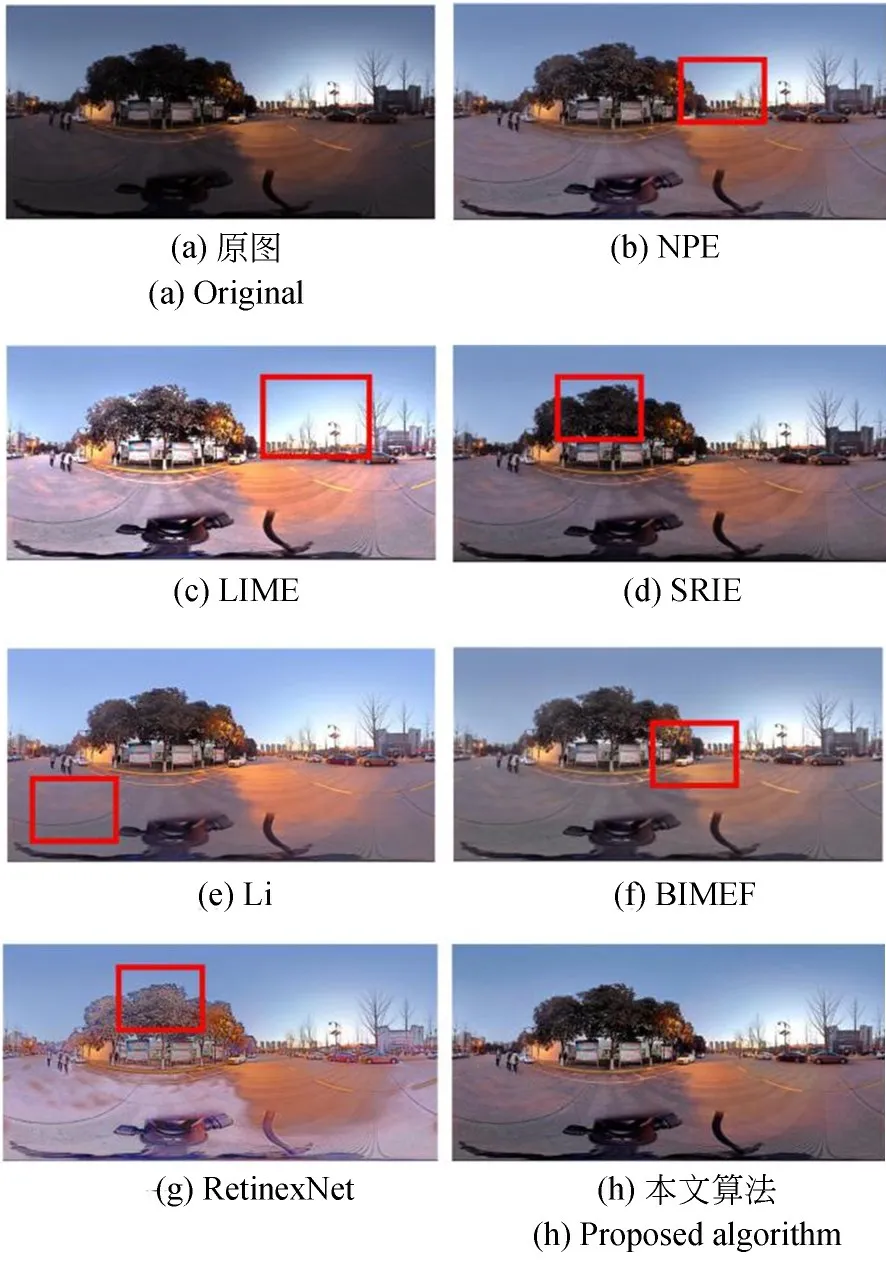
图6 傍晚时分路边全景图像不同增强算法处理结果Fig.6 Results of different enhancement algorithms for the panoramic image
由图6可知,NPE算法和SIRE算法虽可以改善图像的质量,但对于暗区细节恢复地仍不够好,如由图6(b)和(d)红框区域中树木和大楼的亮度仍然偏暗;通过观察图6(c)中红色框区域可以发现,经LIME算法处理后,由于过度增强,导致图像的细节信息不够清楚,亮度有所失真;由图6(e)中红色框区域可以看出,Li算法提高了图像对比度,但存在图像细节信息保持不好的问题;由图6(f)中红色框区域可以看出,BIMEF算法虽能有效提升图像亮度,保持图像细节信息,但增强后图像的整体灰度变化较小,且存在色偏问题;而图6(g)中,RetinexNet算法处理后的图像出现亮度和颜色发生失真,如图6(g)红色框区域中地面出现伪影。而本文算法可以很好地保持图像的细节信息,具有较高的对比度,更加符合人眼特性(彩图见期刊电子版)。
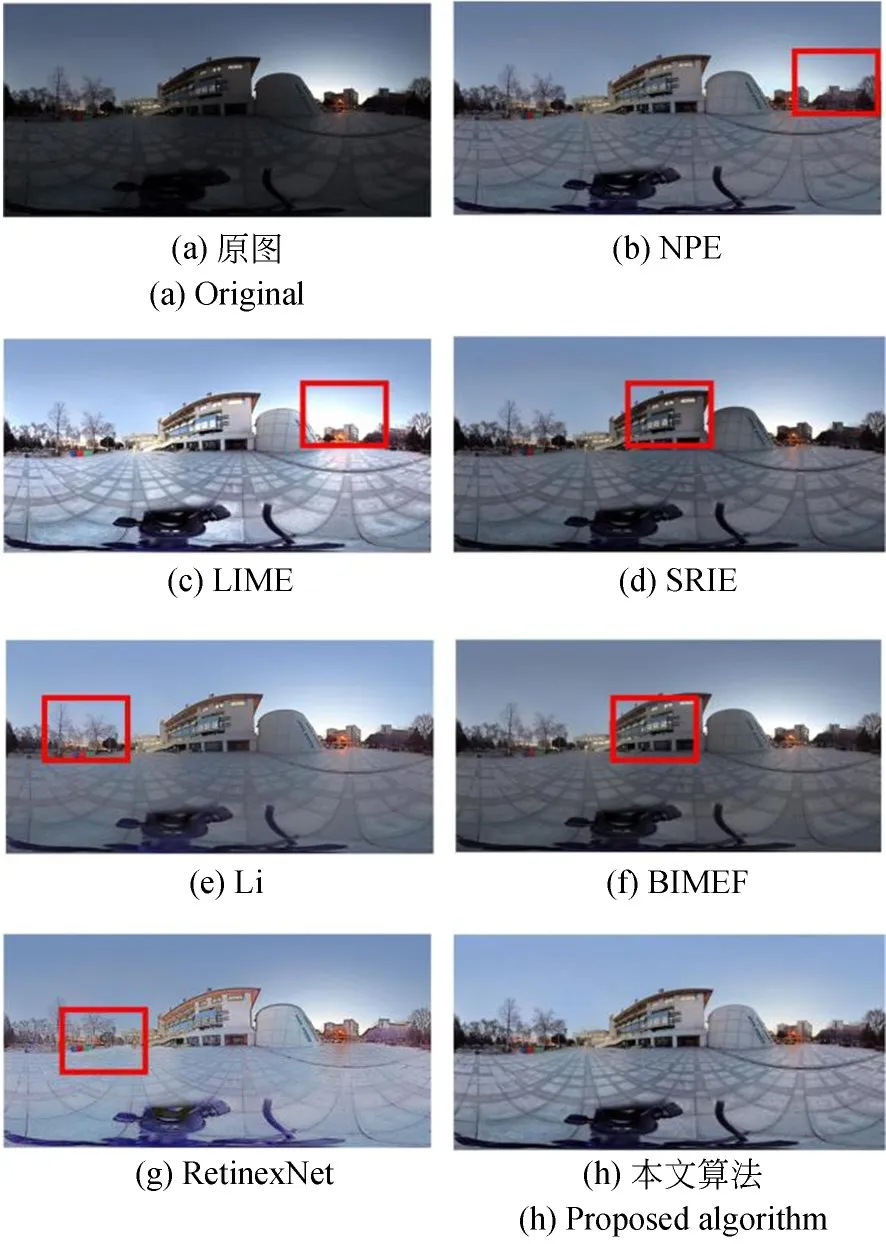
图7 傍晚时分图书馆全景图像不同增强算法处理结果Fig.7 Results of different enhancement algorithms for the panoramic image
由图7可以看出,NPE算法、SIRE算法较好地提升了图像的视觉效果,但仍存在部分图像区域增强不足的问题,如图7(b)和(d)红色框区域中图像的亮度偏低,视觉效果欠佳;通过观察图7(c)中红色框区域可以发现,图7(c)所示方法存在增强过度的问题,增强后图像的亮度不自然,天空区域存在过度增强的问题;由图7(f)可以看出,BIMEF算法的结果图像整体偏灰暗,如图7(f)红色框区域图像存在增强不足的问题;由图7(g)中红色框区域可知,图7(g)所示方法亮度增强效果较好,但图像的颜色仍然不够自然。而本文算法在一定程度上很好地解决了上述算法的缺点,使得增强后的图像更加清晰,图像的颜色更加自然(彩图见期刊电子版)。
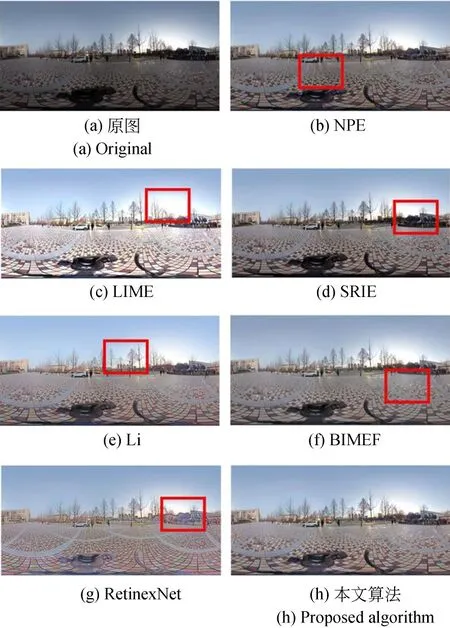
图8 傍晚时分校园广场全景图像不同增强算法处理结果Fig.8 Results of different enhancement algorithms for the panoramic image
通过观察图8可以发现,NPE算法和SIRE算法虽然能够有效地提高图像质量,但仍存在部分图像区域亮度偏低的问题,例如图8(b)和(d)的红框区域中近景地面与远景树木的视觉效果欠佳;通过观察图8(c)中红色框区域可以发现,图8(c)所示方法增强后的图像存在亮度失真问题,图像中部分天空区域过于明亮;由图8(f)中红色框区域可知,BIMEF算法的结果图像颜色不够自然;由图8(g)中红色框区域可知,图8(g)所示方法虽然可以较好地提升图像亮度,但颜色失真明显,远景树木与房屋的轮廓出现伪影现象。本文算法使处理后图像具有较高的对比度与清晰度的同时有效避免了亮度与颜色的失真问题(彩图见期刊电子版)。
由图9(b)和图9(d)中红色框区域可以看出,对于较暗区域(如大楼墙壁、湖面),NPE算法和SIRE算法处理后的结果中墙体的亮度依然偏暗,视觉效果欠佳;通过观察图9(c)中红框区域可以发现,LIME算法对于低照度图像的亮度提升较为显著,但存在增强过度与图像部分区域失真问题;由图9(c)中红色框区可知,对于远景中的树木,Li算法的增强结果存在一定程度的模糊现象,而本文算法的处理结果则显得更加清晰;BIMEF算法处理后的结果整体色调偏灰,图像颜色有些失真,如图9(f)中的红框区域,地面颜色偏灰暗;而图9(g)所示方法的增强结果图像存在较为严重的颜色失真,如图9(g)中的红框区域,树木轮廓区域出现伪影,视觉效果不好(彩图见期刊电子版)。
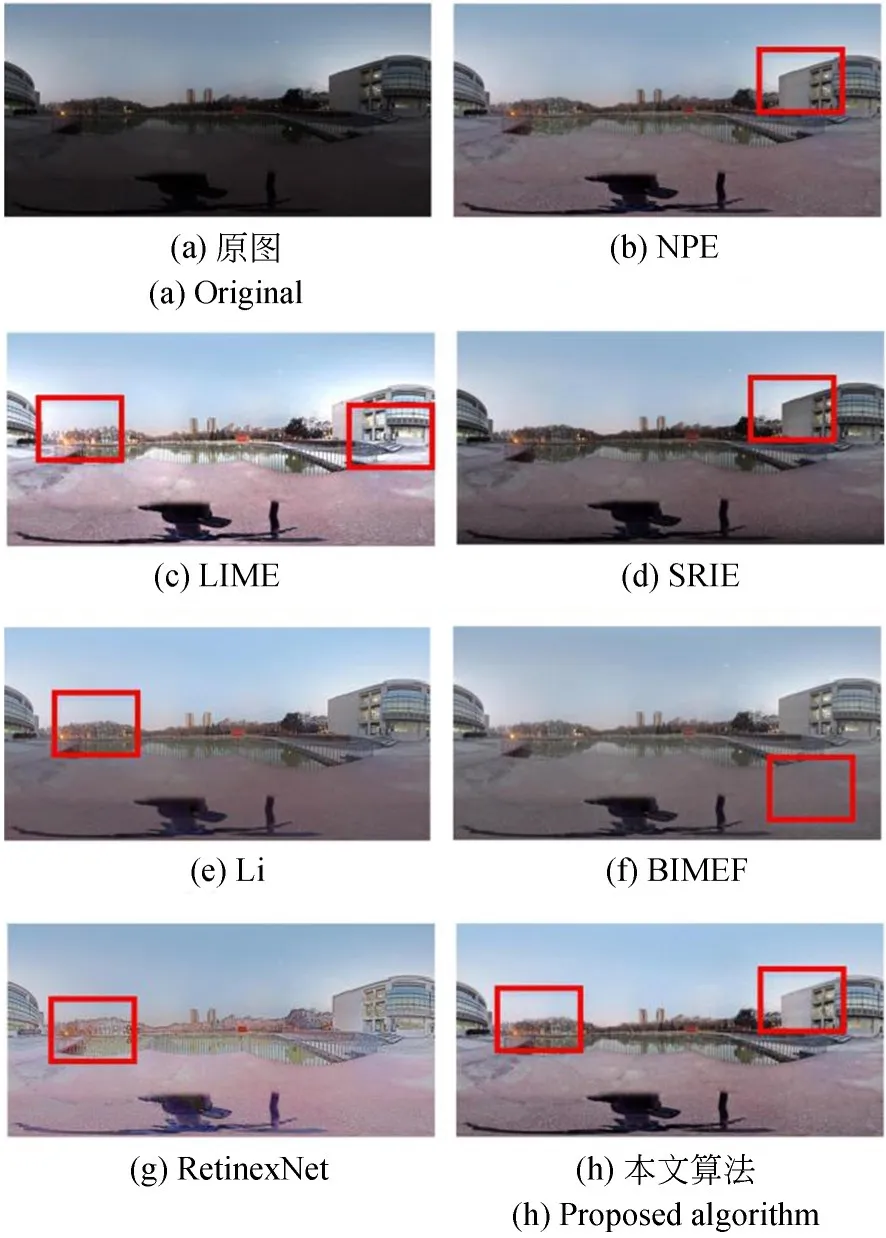
图9 傍晚时分湖边全景图像不同增强算法处理结果Fig.9 Results of different enhancement algorithms for the panoramic image
由图10可知,NPE算法和SIRE算法处理后的全景图像中远景区域的细节不够清晰,且色彩饱和度较弱,如图10(d)红色框区域中远景树木的亮度偏暗;经LIME算法处理后的图像亮度有明显的改善,但存在图像细节丢失严重的问题,如图10(c)中红色框区域,由于过度增强,天空区域过于明亮,树枝的细节丢失严重;从图10(e)与图(f)中红色框区域可以看出,Li算法和BIMEF算法处理后的结果图像中路面的纹理细节信息丢失严重;图10(g)所示方法的增强结果偏“油画”风格,不符合人们对全景图像的视觉要求,如图10(c)红框区域中树木颜色失真,细节信息丢失严重。而我们所提算法处理后的全景图像,可以较好解决低照度全景图像的降质问题,避免图像失真、细节丢失等现象的发生(彩图见期刊电子版)。
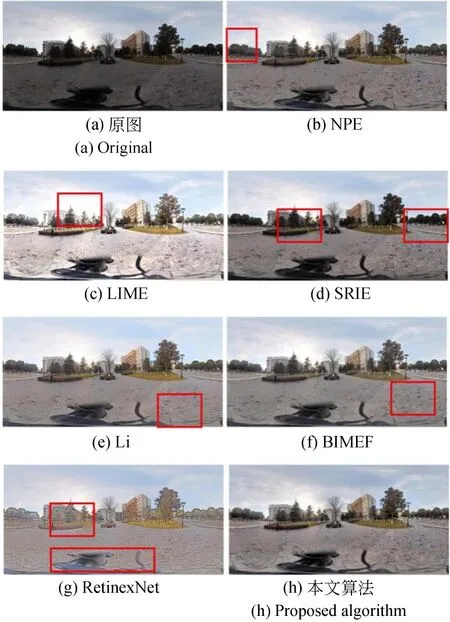
图10 午后教学楼全景图像不同增强算法处理结果Fig.10 Results of different enhancement algorithms for the panoramic image
如图11所示,对于不同场景不同时刻的灰度全景图像,NPE算法和SRIE算法虽然能够较好地保持图像自然,但图像整体偏暗,图像暗区细节仍然不够清晰;LIME算法可以在提高对比度和亮度的同时增强局部细节信息,但是图像整体会出现过增强现象,视觉效果不够自然;Li算法较好地增强了图像亮度与对比度,但图像的原始结构信息有所丢失;基于互信息最优伪曝光技术的Ying算法增强后的图像,整体增强效果较佳,但部分图像区域仍然不够清晰;RetinexNet算法虽然能较好地恢复图像亮度,但增强后的图像存在光晕伪影现象,许多区域细节不够清晰;本文所提出的算法可以较好地保持图像的细节信息,具有较高的亮度对比度,更加符合人眼视觉特性。
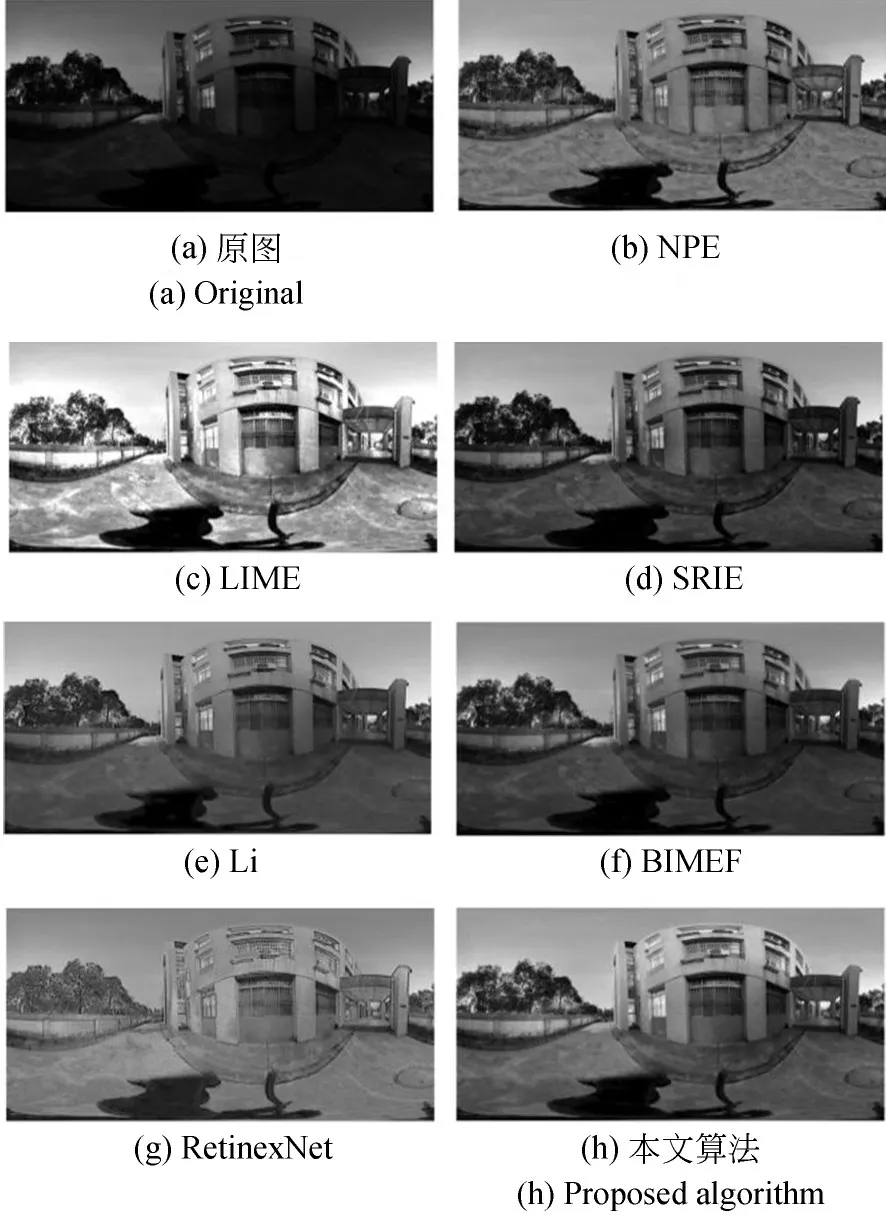
图11 傍晚时分实验楼灰度图像不同增强算法处理结果Fig.11 Results of different enhancement algorithms for the grayscale image
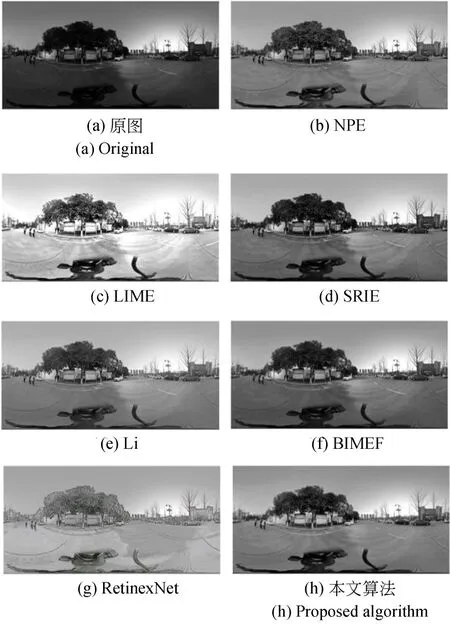
图12 傍晚时分路边灰度图像不同增强算法处理结果Fig.12 Results of different enhancement algorithms for the grayscale image
如图12所示,NPE算法和SIRE算法虽可以改善图像的质量,但处理后的灰度图像中远景区域的细节仍然不够清晰;经LIME算法处理后的图像亮度有所失真,存在过增强现象,如图12(c)中的部分天空区域过于明亮;Li算法提高了图像对比度,但存在图像细节信息保持不好的问题;BIMEF算法虽能有效提升图像质量,但增强后图像的整体灰度变化较小;RetinexNet算法处理后的图像存在亮度失真现象,本文算法可以很好地保持图像的细节信息,具有较高的对比度,更加符合人眼特性。本文算法使处理后图像具有较高的对比度与清晰度的同时有效地保留了图像细节信息。
为了对不同算法的处理结果进行客观评价,本文将亮度失真(Lightness Order Error,LOE)[7]及结构相似性(Structure Similarity Index,SSIM)[22]作为客观评价指标,对本文所提方法的处理结果进行评估。图像亮度失真定义为:

式中:RD(x)表示的原图像与增强结果的相对阶差分,x表示图像像素。RD(x)定义为:
其中:m为像素个数,⊕为异或操作,L(x)和L′(x)分别表示的是像素x在原始图像和增强结果图像中的最大值。对于U(x,y),默认返回值为1;如果x≥y,则返回值为0。根据文献[7],对于增强结果,LOE值越小的图像,亮度自然性就保持地越好,亮度失真率就越低。不同算法的LOE客观评价结果如表1和表2所示。
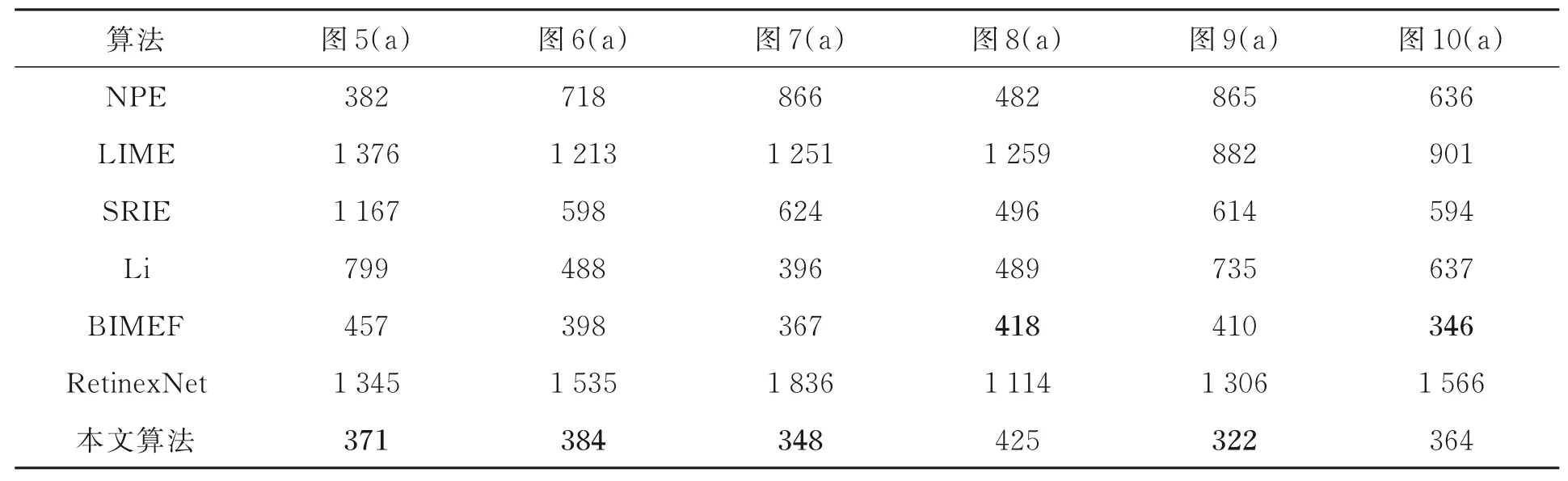
表1 不同算法的LOE客观评价结果对比Tab.1 LOE objective evaluation results comparison of different algorithms
从表1可以看出,相较于大部分的比较算法,对于不同场景下的低照度全景图像,本文算法的LOE指标较小,表明本文算法增强后图像的亮度自然性较好,亮度失真率较低。

表2 不同算法的LOE客观评价结果对比Tab.2 LOE objective evaluation results comparison of different algorithms
从表2可以看出,对于不同场景下的灰度全景图像,本文算法增强图像的LOE指标低于其他比较算法,亮度失真率结果较优,表明本文算法在增强灰度图像的自然性和鲁棒性方面较好。
结构相似性(SSIM)作为衡量图像结构是否失真的重要指标,其数值越大,则表明处理后的图像与原图像越相似。不同算法的SSIM客观评价结果如表3和表4所示。
从表3可以看出,对于不同场景下的低照度全景图像,本文所提算法增强后图像的SSIM指标高于其它大部分的比较算法,表明本文算法可以在提升图像亮度的同时也能较好地保持图像的原有结构。由表4可知,对于不同场景下的灰度全景图像,本文所提算法结果的SSIM指标较优,表明本文算法可以在提升图像对比度的同时能够较好地保持图像的原有结构。
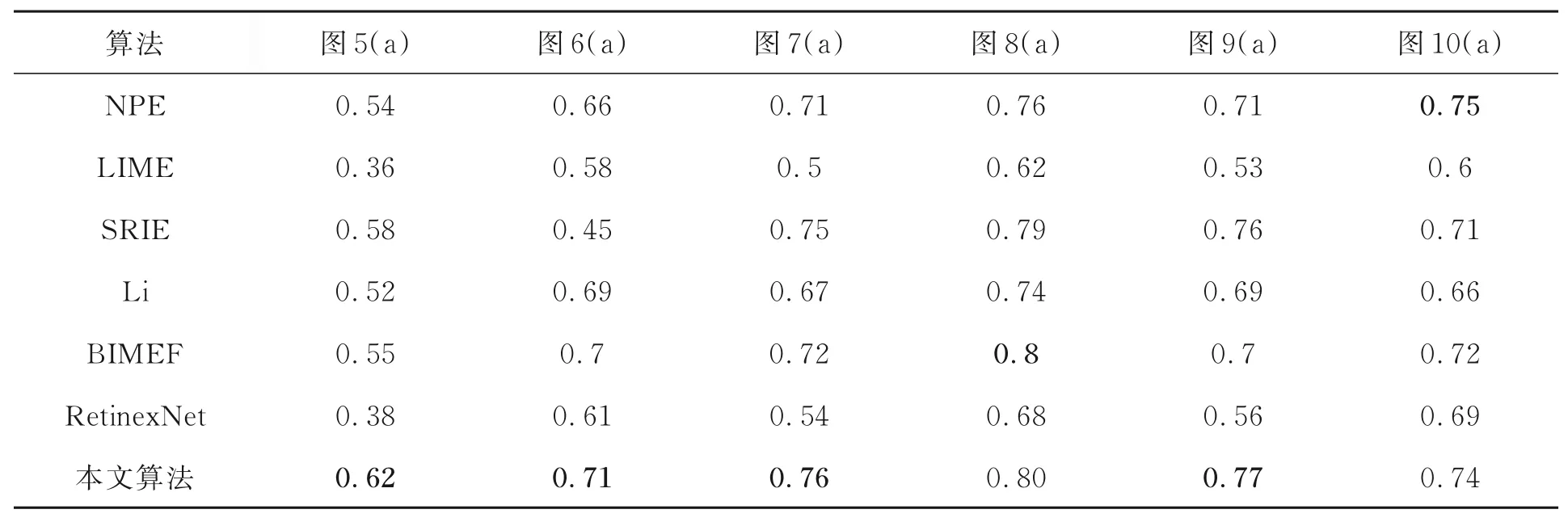
表3 不同算法的SSIM客观评价结果对比Tab.3 SSIM objective evaluation results comparison of different algorithms
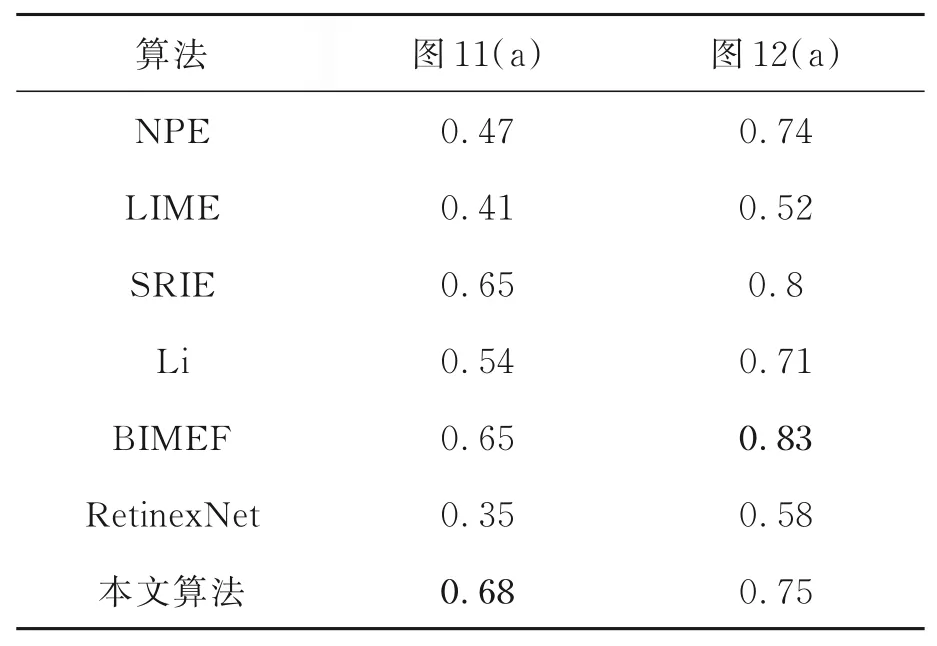
表4 不同算法的SSIM客观评价结果对比Tab.4 SSIM objective evaluation results comparison of different algorithms
为了更加全面地对不同算法的处理结果进行客观评价,本文将自然图像质量评估器(Natural Image Quality Evaluator,NIQE)[23]及无参考空间域图像质量评估器(Blind/Referenceless Image Spatial Quality Evaluator,BRISQUE)[24]作为客观评价指标,客观评价结果如表5和表6所示。
从表5可以看出,对于不同场景下的低照度全景图像,本文算法的NIQE指标与BRISQUE指标高于其他大部分的比较算法,表明本文算法增强后的图像比其他方法的更加清晰,图像质量也更高,信息量也更丰富。
由表6可知,相较于其他比较算法,对于不同场景下的灰度全景图像,本文算法的NIQE指标与BRISQUE指标较优,表明本文算法的增强效果更好,增强后图像的质量更高。
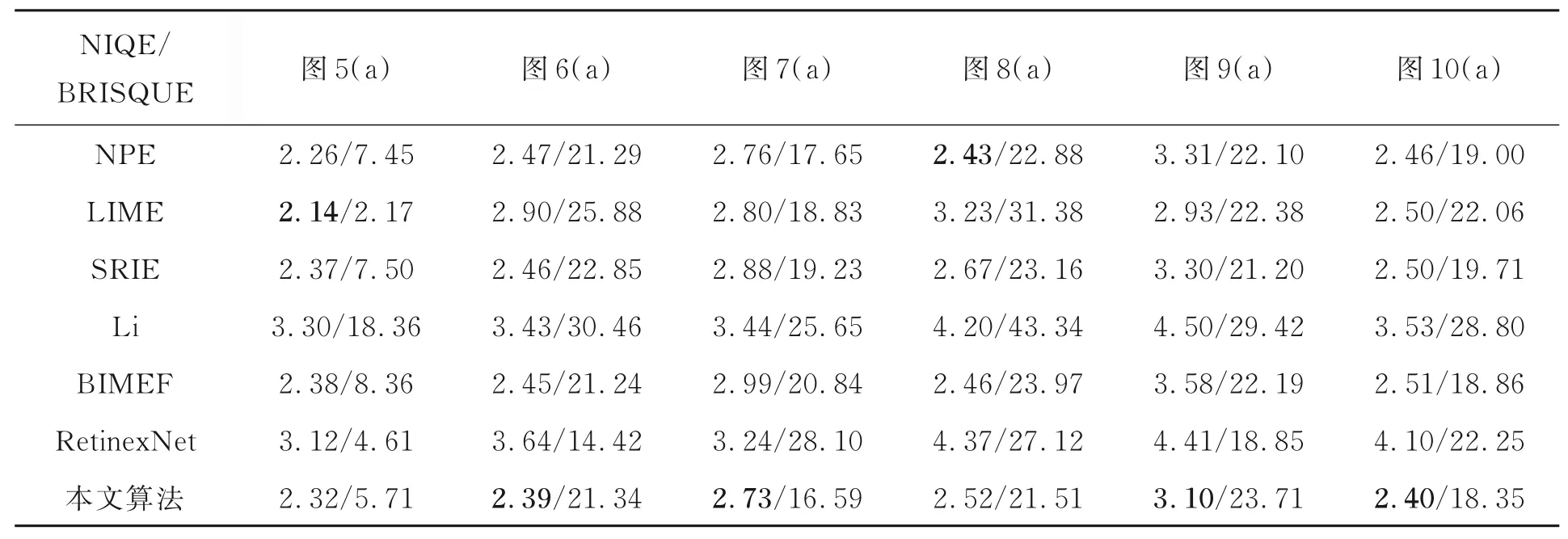
表5 不同算法的NIQE/BRISQUE客观评价结果对比Tab.5 NIQE/BRISQUE objective evaluation results comparison of different algorithms
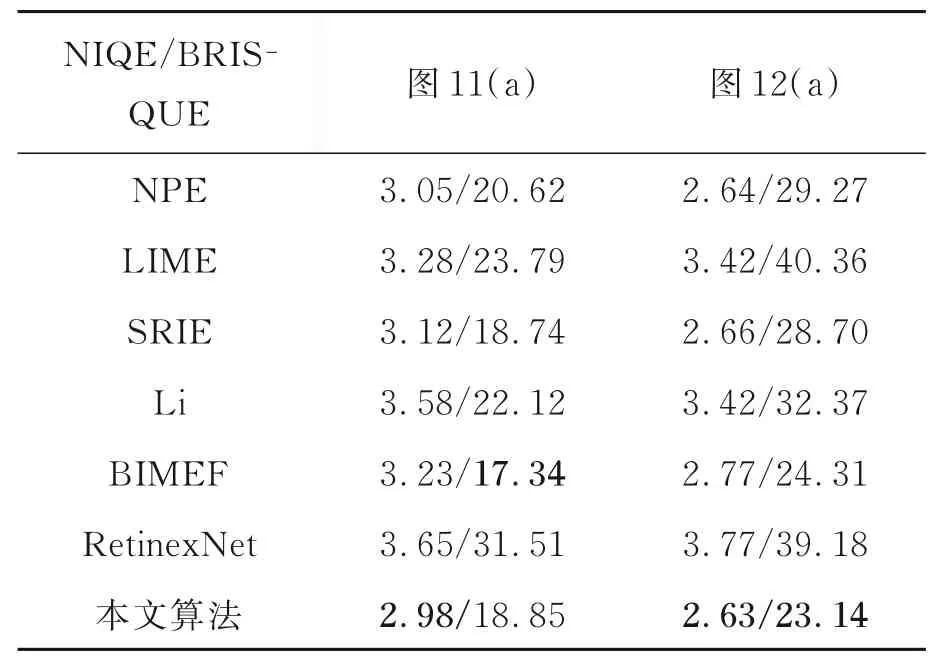
表6 不同算法的NIQE/BRISQUE客观评价结果对比Tab.6 NIQE/BRISQUE objective evaluation results comparison of different algorithms
通过对四个客观评价指标的综合比较可以发现,本文方法在各个性能指标上表现良好,尽管不是所有的客观评价指标都是最高值,但是指标的数值都在正常范围内,表明本文所提算法可以在保持图像结构的同时增强图像的亮度、对比度以及细节信息,且增强后图像的颜色更加自然。
4 结 论
为解决低照度全景图像增强问题,本文提出了一种基于模拟多曝光融合的低照度全景图像增强算法,并通过主观视觉感受和客观指标评价验证了本文算法的有效性,实验结果表明本文算法在增强图像亮度对比度的同时有效避免了颜色失真,也使增强后图像的纹理细节更清晰。
虽然本文算法处理结果较优,但算法复杂度较高,限制了当前算法向工程应用领域的推广。未来研究可以着重于模型优化,并在图像权重的设计这部分开展进一步的研究。
猜你喜欢
燃气涡轮试验与研究(2021年6期)2021-08-01
海洋信息技术与应用(2020年4期)2021-01-18
家庭影院技术(2020年11期)2020-12-28
中国生物医学工程学报(2019年5期)2019-07-16
光源与照明(2019年4期)2019-05-20
英美文学研究论丛(2018年1期)2018-08-16
北京航空航天大学学报(2017年3期)2017-11-23
照明工程学报(2017年3期)2017-07-10
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05