
高速弓网系统动力学参数敏度分析及优化1)
2021-03-24 06:12吴孟臻刘洋许向红
力学学报 2021年1期
吴孟臻 刘洋 许向红,2)
∗(天津大学机械工程学院,天津 300354)
†(中国科学院力学研究所非线性力学国家重点实验室,北京 100190)
引言
高速列车速度的大幅提升,给高速受电弓与接触网关系提出了更高的技术要求[1-2].受电弓安装于列车顶部,在升弓装置作用下与接触网耦合,为列车运行提供电能.当列车高速运行时,受电弓弓头滑板与接触网动态接触,此时受电弓作用到架空接触网上会产生垂向的弓网接触力[3-4].弓网接触力是弓网间耦合作用的直接反映.弓网接触力过大,会加剧弓头滑板、接触线等部件的机械磨损,降低弓网系统的使用寿命;接触力过小,会增大接触电阻,造成电能浪费,甚至产生离线和电弧烧损.
良好的弓网关系是确保列车稳定可靠受流、降低接触线与受电弓滑板磨耗的基本前提.在线路实测和仿真分析中,采用平均接触力Fm和标准差σ 作为受流质量的主要评价指标[3-6].其中,Fm表征弓头碳滑板与接触线间作用力水平,当列车运行速度v>200 km/h(AC)时,需满足Fm<70+0.000 97v2;σ表征接触力的振荡程度,需满足σ <0.3Fm.Fm越小,碳滑板与接触线间的机械磨损越轻;σ 越小,弓网接触力涨落越小,弓网接触性能越优良.因此,良好的弓网关系要求满足Fm的前提下σ 尽可能小,这也是弓网耦合动力学参数优化的主要目标.在进行弓网动力学优化研究时,采用上述接触力随机统计特征作为优化目标函数,是相关问题研究的挑战.
弓网耦合性能主要取决于受电弓和接触网的动力学参数.近年来,进行受电弓模型参数优化以期提升弓网耦合性能,成为弓网动力学仿真研究的重要方向之一.基于DSA250,DSA380 和CX 等受电弓现有参数,通过弓网动力学仿真分析,研究者们提出了三质量块参数的许多优化建议.对弓头的等效质量和等效阻尼、上框架等效阻尼这3 个参数,学者们基本达成共识,认为减小弓头等效质量[7-12],或增大弓头等效阻尼[9,13]、上框架等效阻尼[9,13],均可以降低接触力标准差.然而,关于弓头等效刚度等5 个三质量块参数的研究结果差别较大.为了实现降低接触力标准差,文献[7-9,11]认为应增大弓头等效刚度,他们给出的弓头等效刚度的最优值较为分散,覆盖7860~23 380 N/m;文献[10,12-14]则认为减小弓头等效刚度.文献[7,10,12]认为减小上框架等效质量,唐周林[15]认为应保持上框架等效质量不变.文献[10,12-13]认为应减小上框架等效刚度,但周宁[16]认为应增大上框架等效刚度.Lee 等[7]和Wang 等[12]认为减小下框架等效质量,而Kim 等[10]认为应该增大下框架等效质量.文献[7-8,12]认为需增大下框架等效阻尼,Kim 等[10]认为应该保持下框架等效阻尼不变.此外,下框架等效刚度的研究较少,Wang等[12]认为应增大下框架等效刚度.需要注意的是,同一参数在不同文献中的优化范围大多不同,例如,弓头刚度的优化范围众多,取原参数的0.9~1.1 倍[7],0.017~1.65 倍[14]、1~3.98 倍[11]等;联合优化的参数个数也不同,涵盖1 个[8,11,13-14]到7 个[12]不等.事实上,受电弓动力学特性对弓网耦合性能的影响,与敏度分析时的参数起点和变化范围、多参数联合优化时的参数个数等都密切相关.这也是已有报道的研究结果较为分散甚至完全相反的原因之一.
本文利用有限元法建立了二维弹性链悬挂接触网−三质量块受电弓动力学模型,依据EN50318 规范结果校验了动力学分析结果的正确性.以实验测得的DSA380 型高速受电弓在1600 mm 工作高度下的三质量块参数为基础,根据工程设计可行性确定模型参数的实现范围,进行了350 km/h 时速下受电弓三质量块参数的敏度分析,确定了在DSA380 现有基础上的参数敏感性级别.研究了当弓头等效刚度与等效阻尼联合变化时,弓网耦合系统动力学关系的变化,结果表明弓头双参数优化相比于单参数优化,能够实现更高的弓网耦合性能.
1 弓网耦合动力学模型
1.1 受电弓动力学方程
受电弓底座安装于列车顶部,弓头滑板与接触线接触.图1 所示的三质量块受电弓模型的动力学方程如下[13,17-18]

式中,mi,ki,ci和zi(i=3,2,1)分别为弓头、上框架和下框架的等效质量、等效刚度、等效阻尼和垂向位移.施加在质量块m2和m1上的抬升力分别为F2和F1;接触力为Fc.
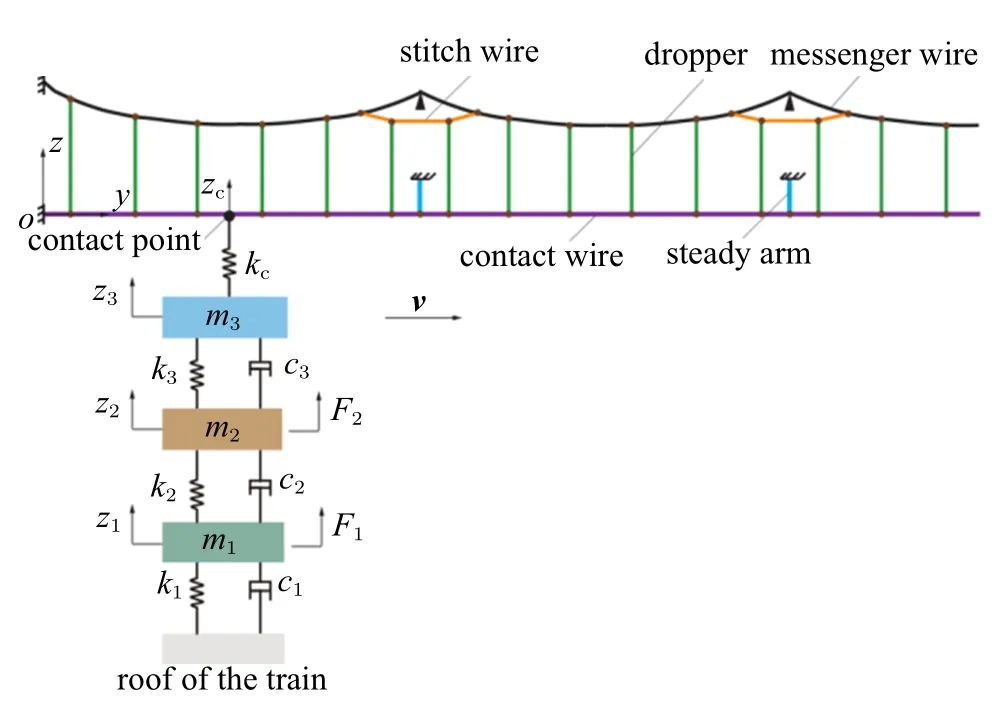
图1 高速弓网系统示意图Fig.1 Illustration of high speed pantograph-catenary system
1.2 接触网动力学方程
忽略接触网拉出值和接触线横向运动,建立包括接触线、承力索、弹性吊索、吊弦和定位器的二维弹性悬挂接触网模型(图1)[19-21].其中,接触线、承力索和弹性吊索的长度远大于其截面尺寸,由弯曲变形引起的弯曲应力远小于预张力引起的拉伸应力,弯曲应力对50 Hz 以下动态接触力的影响很小[22-23],故接触线、承力索和弹性吊索简化为细长杆模型[20,24-27].吊弦是只能承受拉力的细长绳索,主要发生轴向伸缩运动,简化为只具有抗拉刚度的弹簧模型[7,13,28].定位器呈一定角度斜向提拉接触线,接触线上下振动会引起拉力方向改变,且接触线承担定位器的部分重力,可将定位器简化为弹簧−质量点组合模型,取定位器质量一半与定位线夹质量之和为质量点质量,弹簧刚度为213 N/m[7,29].在上述模型简化前提下,可得接触网动力学方程

式中,Mc为接触网的质量矩阵,Cc为接触网阻尼矩阵,Kc为接触网刚度矩阵,zc为接触网上节点的位移向量,P为接触网上节点的外载荷向量.
1.3 弓网耦合关系模型
受电弓与接触网之间通过接触力形成耦合动力学系统,可用罚函数法模拟弓头滑板与接触线的耦合行为以求解接触力[30]
式中,z3为弓头垂向位移,zc为接触位置接触线上的节点垂向位移;取接触刚度kc=50 000 N/m[27,31].
2 耦合动力学方程的数值方法及校验
2.1 耦合动力学方程的数值方法
按照几何参数建立接触网初始几何构型.接触网的高度HC方向为z向、长度方向为y向.接触线位于z=0 的直线上,其左端起点为坐标原点(0,0);承力索和弹性吊索位于z=HC的直线上.
采用有限单元法对结构进行离散.接触网模型中的接触线、承力索和弹性吊索采用杆单元,单元长度均为0.2 m.吊弦采用只承拉的弹簧单元,每根吊弦只划分一个单元.定位器采用质量块与弹簧的组合单元.三质量块模型中的质量点和弹簧分别采用质量单元和弹簧单元.弓网耦合模型中,采用Conta175和Targe169 单元分别覆盖弓头质量点和接触线下表面,二者形成接触对.接触线、承力索两端施加全约束,承力索每一跨的节点上施加z方向平动约束,在定位器端部施加全约束,在各质量块上施加只释放z方向平动的约束.
对各个部件进行弹性模量、泊松比、结构阻尼、质量、预张力等参数赋值.利用负驰度法[23,32]计算接触网的初始平衡状态,使得在重力和预张力作用下接触线保持水平.联立方程(1)~(3)可得接触网和受电弓动力学平衡方程

式中,M为整体质量矩阵、C为整体阻尼矩阵、K为整体刚度矩阵、z为节点位移向量、F为节点的外载荷向量.采用Newmark 法进行时间积分计算,引入如下假设

式中,zt为t时刻节点位移向量、∆t为时间积分步长、zt+∆t为t+∆t时刻节点位移向量、α 和β 为时间积分参数,计算时选取α=0.5、β=0.25.
联立方程(4)~(6) 即可求解弓网耦合动力学方程.在数值计算中,最大时间积分步长0.001 67 s,结果输出时间间隔0.005 s,接触网跨数30,受电弓起始位置为y=0,运行速度v=350 km/h.
首先,进行动力学计算、迭代,确定质量块m2和m1上的抬升力F2和F1,使得接触力均值Fm达到目标值70+0.000 97v2=189 N.然后,计算弓网系统的接触力、抬升位移等参数.在具体仿真计算过程中,采用ANSYS 商用软件实现.
2.2 EN 50318:2018 标准算例校验
基于二维弹性链悬挂接触网-三质量块受电弓动力学模型,针对EN 50318:2018 给定的接触网−双受电弓参数[4],进行弓网接触力动力学计算,统计10~20 跨内前、后受电弓与接触网之间的接触力标准差σ、平均值Fm、实际最大值Fmax和实际最小值Fmin,以及接触点垂向位移范围RVPPC 和定位器处最大抬升量MUS (图2).当受电弓运行速度v=275 km/h 和320 km/h 时,仿真计算结果均位于EN 50318:2018 规定的范围.因此,本文建立的二维弹性链悬挂接触网−三质量块受电弓动力学模型计算结果可信.
3 弓网耦合参数分析及优化
基于二维弹性链悬挂接触网−三质量块受电弓动力学模型,计算DSA380 型高速受电弓在大西线上运行的动力学行为.针对DSA380 型高速受电弓在1600 mm 工作高度情形,实测的弓头、上框架和下框架的等效质量分别为7.94 kg,8.22 kg 和5.90 kg,等效刚度分别为6650 N/m,13 181 N/m 和74.0 N/m,等效阻尼分别为85.31 N·s/m,11.90 N·s/m 和67.41 N·s/m.大西线接触网的高度1.8 m、跨距55 m、吊弦间距9.4 m;接触线、承力索和弹性吊索的杨氏模量分别为120 GPa,105 GPa 和113 GPa,预张力分别为30 kN,21 kN 和3.5 kN.取接触网跨数30、受电弓起始位置y=0、运行速度v=350 km/h,计算得到弓网接触力和接触点垂向位移的时程曲线(图3),统计10~20 跨稳定段内的数据,得到Fm=189.02 N,σ=35.44 N,Fmax=269.69 N 和Fmin=97.96 N.下文的仿真计算中,保持所有受电弓参数情形的静态接触力均为80 N.

图3 弓网接触力时程曲线Fig.3 Time history curves of contact force
3.1 三质量块参数的敏度分析
假设9 个三质量块参数相互独立,以控制变量法计算单个归算参数在取值区间内变化时,弓网接触力的平均值、标准差、最大值和最小值相对于DSA380归算参数时的变化量∆Fm,∆σ,∆Fmax与∆Fmin.根据工程设计的可行性,确定m3、m2和m1的取值范围分别为5~11 kg,5~20 kg 和3~20 kg;k3,k2和k1的取值范围分别为4000~14 000 N/m,8000~20 000 N/m和0~200 N/m;c3,c2和c1的取值范围分别为0~100 N·s/m,0~50 N·s/m 和10~240 N·s/m.
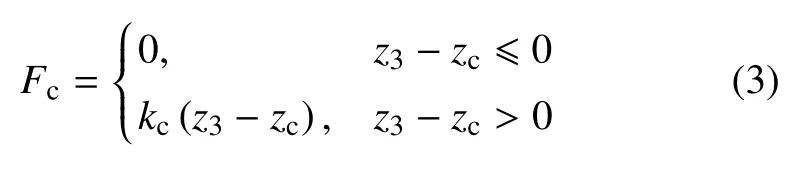
图4 给出了三质量块参数变化对∆Fm的影响.将每个归算参数xi除以其取值上限xmax,得到无量纲量xi/xmax.其中,当改变下框架等效刚度k1时,接触力均值Fm的变化显著,当k1从0 N/m 增大到200 N/m 时,∆Fm=−15.78 N.这表明,如果k1发生变化,则需要调整受电弓的静态接触力,以使得线路运行的接触力均值达到预期.当改变其他8 个参数时,Fm几乎不变,在这8 个参数的整个参数变化区间内,|∆Fm|不高于0.11 N,即保证静态接触力相等,可以保证运行过程中的Fm恒定.
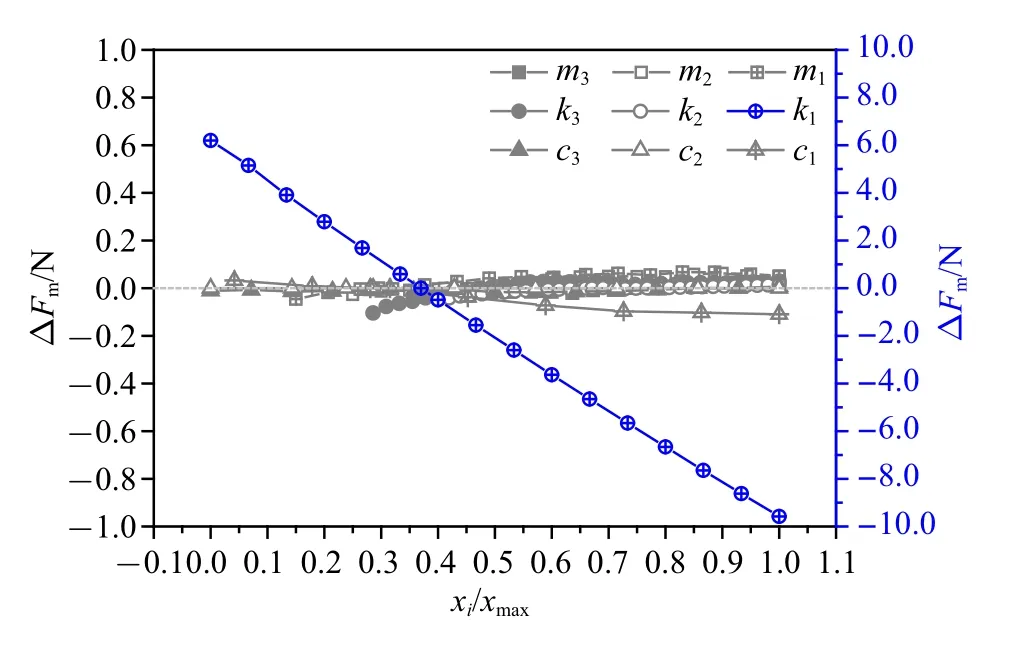
图4 三质量块参数对∆Fm的影响Fig.4 ∆Fmversus normalized three lumped mass parameters
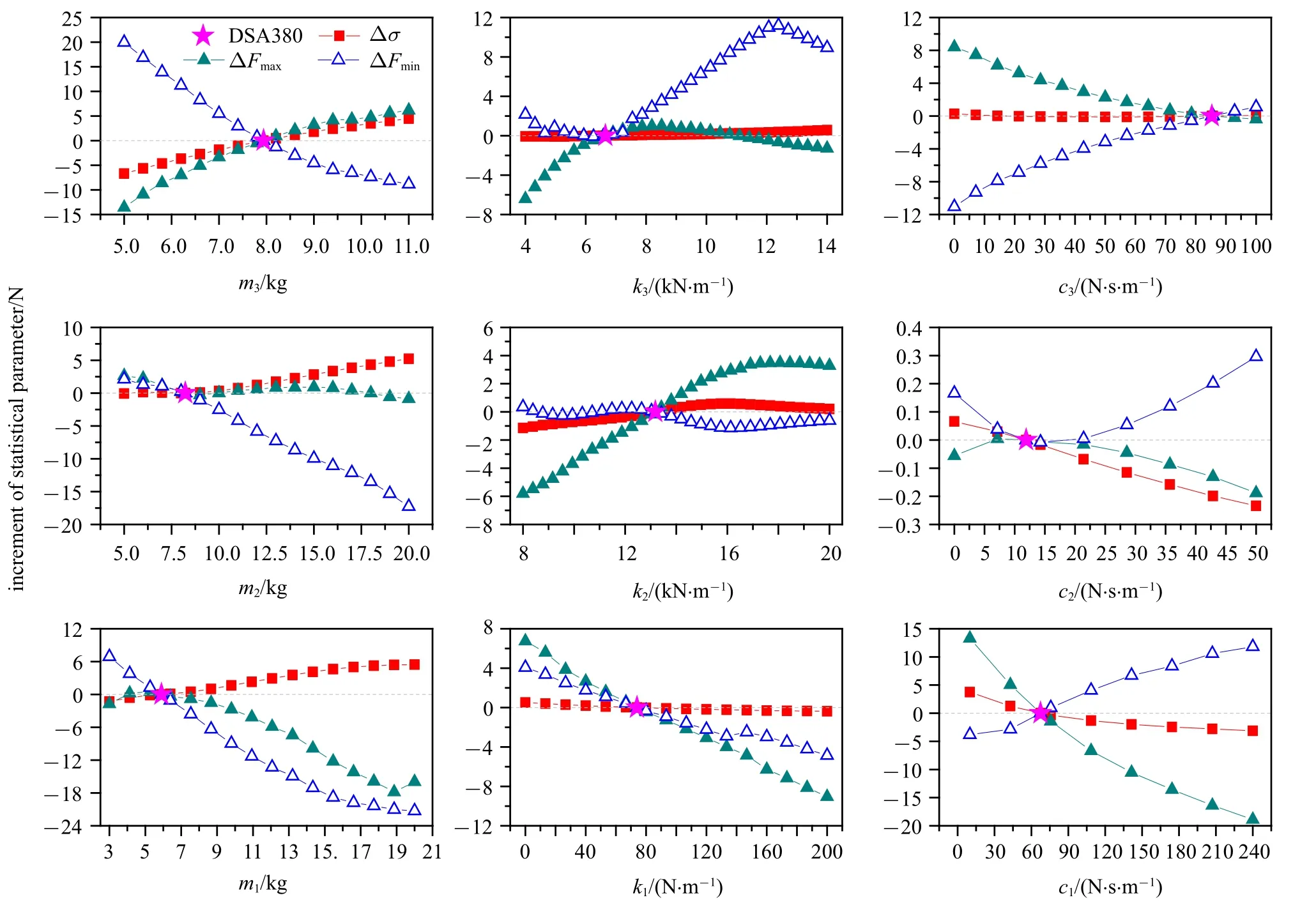
图5 三质量块参数对∆σ,∆Fmax与∆Fmin的影响Fig.5 ∆σ,∆Fmaxand ∆Fminversus normalized three lumped mass parameters
图5 给出了三质量块参数变化对∆σ,∆Fmax与∆Fmin的影响.以DSA380 参数为基准,关注引起∆σ <0 的参数变化范围;若∆σ ≈0,则考察∆Fmax<0且∆Fmin>0 的参数区间.可以看出,减小弓头或下框架等效质量、或弓头或上框架等效刚度,或增大3个等效阻尼,都可以有效提升弓网耦合性能,即在降低接触力标准差σ 的同时,降低接触力最大值Fmax、且增大接触力最小值Fmin.然而,对下框架等效刚度k1和上框架等效质量m2,当其改变使得∆σ <0 时,却会引起Fmax增大或Fmin减小,建议维持不变.
进一步地,基于敏度分析得到的单参数最优情形的∆σ,∆Fmax和∆Fmin(图6 和表1),给出DSA380型高速受电弓三质量块参数的敏度评级.其中,m3敏度评级为1,当m3减至5.00 kg 时,∆σ=−6.70 N,∆Fmax=−13.54 N,∆Fmin=19.94 N.c1敏度评级为2,当c1增至240 N·s/m 时,∆σ 为m3情形的1/2,其Fmax降低更为显著,∆Fmax约为m3情形的1.5 倍.m1,k2敏度评级为3,相应参数变化会使得∆σ 下降1.14 N以上,二者相比,m1减小侧重于增大Fmin,而k2减小倾向于降低Fmax.c2,k3,c3敏度评级为4,它们引起的接触力标准差改变量接近于0.k1和m2敏度评级为5.
因此,如果只进行DSA380 型高速受电弓单参数优化,建议参数为m3=5.00 kg,m2=8.22 kg,m1=3.00 kg,k3=4000 N/m,k2=8000 N/m,k1=74.0 N/m,c3=100.00 N·s/m,c2=50.00 N·s/m 和c1=240.00 N·s/m.
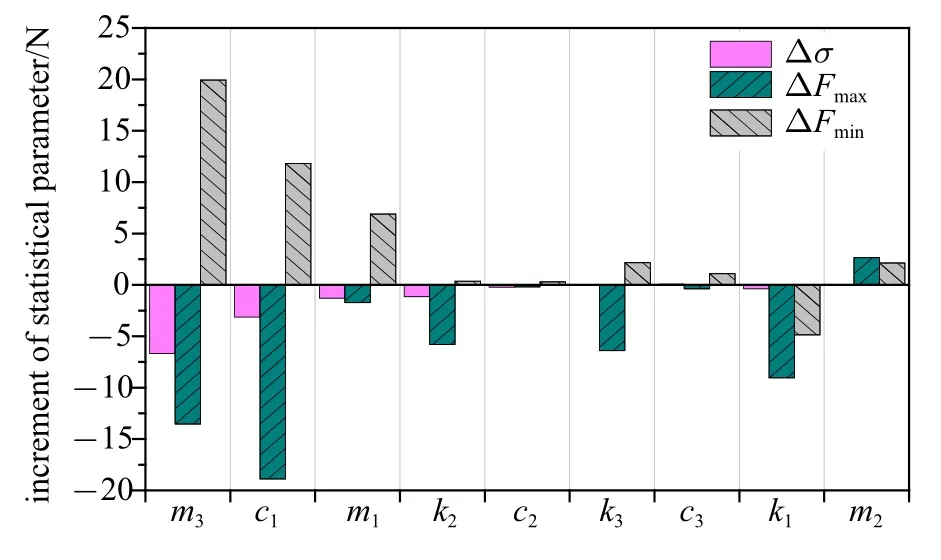
图6 单参数变化取最优值时的∆σ,∆Fmax与∆FminFig.6 Optimal values of ∆σ,∆Fmaxand ∆Fminunder sigle parameter variation

表1 三质量块参数敏度分析Table 1 Sensitivity analysis of three lumped mass parameters
3.2 弓头等效刚度和等效阻尼耦合作用
相比于框架归算参数,改变弓头等效参数从工程设计角度更容易实现.但3.1 节的敏度分析结果表明,弓头等效刚度和等效阻尼的敏度评级较低,在取值范围内单独改变k3或c3几乎对接触力标准差没有影响.
图7(a) 为k3和c3联合变化情形的∆σ 云图.两条粗实线范围内均有∆σ <0,比DSA380 (图中符号⋆) 的接触力标准差低.当k3=10 575 N/m,c3=0.00 N·s/m 时,∆σ 取最小值−1.58 N,σ 取最优值33.87 N(图中符号☆).由此可见,弓头等效刚度和等效阻尼双参数优化结果明显高于单参数变化情形.

图7 弓头双参数优化Fig.7 Dual-parameter optimization of pantograph head
此外,k3不同时,σ 随c3的变化趋势不同.随着c3减小,当k3较低,4000 N/m ≤k3<7900 N/m 时,σ 先减小再增大;当k3较高,7900 N/m ≤k3≤14 000 N/m时,σ 单调降低.c3不同时,σ 随k3的变化趋势不同.随着k3减小,当c3较低,0 N·s/m ≤c3<90 N·s/m 时,σ先减小再增大;当c3较高,90 N·s/m ≤k3≤100 N·s/m时,σ 单调减小.
综合∆σ、∆Fmax(图7(b))和∆Fmin(图7(c))云图,得到图7(d),在优化区域弓头双参数变化时的弓网耦合性能分区.在区域I–V,均有∆σ <0.其中,在区域I 和II 同时有∆Fmax<0、且∆Fmin>0,为可行的参数优化区,且I 区比II 区更优,双参数最优值位于I区;然而,区域III 的∆Fmax>0,区域IV 的∆Fmax>0,∆Fmin<0,区域V 的∆Fmin<0,不建议参数处于这3个区.
4 结论
在保证静态接触力相同的条件下,下框架等效刚度变化会对接触力均值有显著影响,弓头等效质量等其他8 个参数改变对接触力均值几乎没影响.因此,在受电弓设计或使用中,若下框架等效刚度变化较大,则需要调整静态接触力经验值,以使线路运行的接触力均值达到预期.
针对DSA380 型高速受电弓在1600 mm 工作高度下三质量块参数的敏度分析结果表明,减小弓头或下框架等效质量、或弓头或上框架等效刚度,或增大3 个等效阻尼,都可以提升受流质量.其中,弓头等效质量敏度评级最高,下框架等效阻尼次之,下框架等效质量和上框架等效阻尼第三.
弓头等效刚度与等效阻尼双参数联合变化情形,呈现与单参数变化时不同的参数优化方案,建议同时减小弓头等效阻尼和增大弓头等效刚度,使得联合参数位于I 区.此外,在不同的参数区间,接触力标准差随弓头等效刚度或弓头等效阻尼的变化规律也会发生变化,这可能是众多已有研究成果存在差异的原因.
猜你喜欢
云南画报(2021年10期)2021-11-24
测控技术(2018年8期)2018-11-25
时代农机(2018年12期)2018-02-14
上海铁道增刊(2017年3期)2018-01-22
石家庄铁路职业技术学院学报(2017年4期)2017-05-25
上海铁道增刊(2017年2期)2017-04-18
西南交通大学学报(2016年3期)2016-06-15
现代工业经济和信息化(2016年4期)2016-05-17
电气化铁道(2016年4期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
