
基于DCGAN的印刷缺陷检测方法
2021-03-14 12:18王海涛高玉栋侯建新何勇军陈德运
哈尔滨理工大学学报 2021年6期
关键词:缺陷检测
王海涛 高玉栋 侯建新 何勇军 陈德运





摘 要:近年来,深度学习被广泛应用于缺陷检测。目前方法可以检测较大的缺陷,但对于细微缺陷还是无法准确检测。针对这一问题,提出了一种基于深度卷积生成对抗网络(Deep convolutional generative adversarial networks,DCGAN)网络的印刷缺陷检测方法。该方法通过以下几点来提高检测精度:①在原有网络的基础上增加上采样模块,减少上采样中的损失;②提出一种自注意力机制,生成结构性更复杂和细节更准确的图像;③统计分析生成图像的噪声分布,确定最佳阈值,去除噪声,获得准确的缺陷图像。该方法加入了去噪处理,优化了网络结构,提高了DCGAN生成图像的精度。实验表明,与现有方法相比,在小于5像素的缺陷检测实验中,本方法可以使检测精度提高10%。
关键词:DCGAN;自注意力机制;缺陷检测;图像重建
DOI:10.15938/j.jhust.2021.06.004
中图分类号: TP391;TH742
文献标志码: A
文章编号: 1007-2683(2021)06-0024-09
A Method of Printing Defect Detection Based on DCGAN
WANG Hai-tao1, GAO Yu-dong2, HOU Jian-xin2, HE Yong-jun2, CHEN De-yun2
(1.Moden Educational Technology Center,Harbin University of Science and Technology,Harbin 150080, China;
2.School of Computer Science and Technology,Harbin University of Science and Technology,Harbin 150080, China)
Abstract:In recent years, deep learning has been widely used in defect detection. At present, the method can detect large defects, but it is still unable to detect the fine defects accurately. In order to solve this problem, this paper proposes a new method of printing defect detection based on deep convolutional general advanced networks (DCGAN) networks. The method improves the detection accuracy by the following points: ①The upper sampling module is added on the basis of the original network, and the loss in the upper sampling is reduced; ②A self-attention mechanism is proposed to generate more complex and accurate images; ③The noise distribution of the image is analyzed statistically, the optimal threshold is determined, the noise is removed and the accurate defect image is obtained. This method adds denoising processing, optimizes the network structure, and improves the accuracy of DCGAN image generation.The experiment shows that the accuracy of the method can be improved by 10% in the defect detection experiment to less than 5 pixels compared with the existing method.
Keywords:DCGAN; self-attention mechanism; defect detection; image reconstruction
0 引 言
随着生活水平的提高,人们对于印刷品的外观质量也有了更高的要求。中国拥有巨大的印刷市场,印刷检测也成为了学术界的研究热点。传统的人工检测,不仅费时费力,而且不同质检员有不同的检测标准,同时还伴随着疲劳而导致的误检漏检。这种方式在追求质量与效率的当下逐渐被淘汰,已经由自动化的机器视觉检测所替代。自动化检测可以实现24h同标准同速度的检测,不会有人工疲劳带来的风险,同时极大的节约了人力物力,是当前最为流行的检测方式。但是随着深度学习的到来,人们慢慢不满足于机器视觉的检测效果。传统的机器视觉通过模板匹配的方式来进行检测缺陷。这种图像相减获得缺陷的方式,受限于圖像校准的性能。如果无法完美校准,则会有图像和特征边界处的缺陷出现。此时基于深度学习的缺陷检测框架刚好可以弥补这一不足。与传统的机器视觉方法相比,基于深度学习的方法可以自动提取图像特征,简化图像预处理过程,有效的提高了缺陷检测的准确性和效率[1]。Zhao等[2]利用生成式对抗网络(GAN,generative adversarial networks)和自编码器(autoencoder,AE)实现表面缺陷图像的重建,然后将输入图像和重建图像输入到局部二值模式(local binary pattern,LBP)算法处理后再做差获得缺陷。但是这种方式目前还无法检测细微缺陷。
1 国内外相关研究
在印刷缺陷检测领域,目前国内外的学者已经对此问题做出了很多的探索和研究。主要包括传统检测方法和基于深度学习的检测方法。
1.1 传统方法
传统的检测方法主要有以下几种。马斌武提出了一种二次模板匹配的算法。首先通过模板匹配定位待检特征,使用阈值分割获得特征区域,然后进行第二次模板匹配检测缺陷。该方法可以灵活检测不规则特征,但检测精度受限于模板匹配之前的图像校准,还无法准确检测细微缺陷[3]。王一红针对在线检测提出了一种基于相似度的检测方法,根据相似性可以检测倾斜角度和是否含有缺陷[4]。
1.2 深度学习方法
近年来深度学习在缺陷检测领域也有很多探索。按照训练样本的数据标签的不同,可以分成全监督学习模型、无监督学习模型和半监督学习模型。
其中全监督学习模型的方法比较普遍。Cha[5]使用基于区域的快速卷积神经网络(faster region-based convolutional neural network,Faster R-CNN)模型进行表面缺陷检测,把核心替换成ZF-net,获得了87.8%的mAP。Zhong等[6]提出了一种不同于Faster R-CNN的方法,他们先对低层两组特征图进行降采样,然后对高层特征图上采样,将他们联结形成新的超特征图,最后对新的超特征图进行proposal提取。Tao等[7]设计了一个两阶段的Faster R-CNN网络用于缺陷定位,第一阶段用于缺陷所在的区域定位,第二个阶段实现区域中的缺陷定位。然后,Xue等[8]对Faster R-CNN模型进行了改进,其核心采用改进的Inception全卷积网络得到特征图,同时增加两个锚框比例,使用位置敏感的ROIpooling替代传统的ROIpooling,精度和速度都较之前有所提升。Ding等[9]提出了一种针对印制电路板(Printed Circuit Board,PCB)表面缺陷检测网络(TDD-Net),该方法使用k均值聚类设计合理锚框大小,从而加强了来自底层结构信息的融合,使得网络适应微小的缺陷检测。He等[10]提出了基于Faster R-CNN的带钢表面缺陷检测网络,该网络通过将backbone中多级特征图组合为一个多尺度特征图,获得了83.2%的mAP。Li等[11]提出了一种基于MobileNet-SSD的方法,利用MobileNet优化了backbone结构,从而简化了检测模型参数。Liu等[12]同样对MobileNet-SSD网络加以改进,其改进点在于采用MobileNet作为backbone,并且只使用4 个不同的特征图来加速目标检测。而Zhang等[13]在原始YOLOv3网络基础上引入了预训练权重、批再规范化和Focal loss,进一步提高了缺陷检测率。另外还有人改进FCN网络进行缺陷检测。Wang等[14]提出一种基于FCN的缺陷分割方法,通过融合多尺度采样层的特征图来细化分割轮胎图像中的缺陷。而Yu等[15]提出了一个基于FCN的两阶段表面缺陷分割模型,第一阶段用轻量级的FCN网络获取粗略的缺陷区域,第二阶段的FCN用于细化缺陷分割結果。Dung等[16]提出了一种基于FCN网络的缺陷分割方法,引入了VGG16编码器,其平均像素准确率达到90%。同时还有基于Unet网络的缺陷检测方法。Huang等[17]使用MCuePush Unet的模型用于检测。其改进在于输入为MCue模块生成三通道图像,一个为显著性图像,另外两个为原始图像。Li等[18]提出了一种基于改进Unet网络的表面缺陷分割方法。在编码器采用Dense Block模块,同时用逐像素求和方法来替代跳层连接原始的concat操作。
无监督学习模型是基于正常样本学习的方法,只接受正常(无缺陷)样本进行训练,使其具备正常样本分布的重建和判别能力。Mei等[19]通过卷积自动编码网络在不同的高斯金字塔等级上重建图像子块,并将这些不同分辨率通道的重建结果进行合并,取得了相比传统图像处理方法好的效果。Haselmann等[20]设计了一个基于全卷积的自动编码器网络,利用网络对缺陷图片的补全和重建的误差实现缺陷检测。Kang等[21]设计了一个深度去噪编码器,通过计算重建误差来检测图像中的缺陷。Youkachen等[22]使用卷积自动编码器(convolutional autoencoder,CAE)重建图像,通过锐化处理重建误差获取最终的缺陷分割结果。Bergmann等[23]首次将传统图像处理中的SSIM(structural similarity)重构损失,引入到基于自动编码器的图像重构中,实验结果表明SSIM损失能大幅提高表面缺陷检测的效果。Yang等[24]提出了一种基于无监督多尺度特征聚类的全卷积自动编码器(MS-FCAE)方法,利用不同等级的FCAE子网来重建背景图像,以达到最大程度地提高效率和编码特征图的判别能力。Zhai等[25]采用多尺度融合策略融合GAN鉴别器的三个卷积层的响应,然后利用大津法分割在融合特征响应图上分割出缺陷位置。Akcay等[26]提出了一种GANomaly检测图像异常,其创新点在于引入了编码解码和再编码模块。
目前的方法在细微缺陷的检测方面,其性能仍然不理想。传统的模板匹配方式受限于待检图像与模板图像的校准性能。特别是图像的边缘位置。如果没有校准,则会出现错位,引起误检。
深度学习方法可以应对较为复杂的实际检测环境。其中监督学习利用大量的标记数据来进行模型训练,可以检测出训练数据中标记缺陷类型,却无法检测出未标记的缺陷。使用正样本训练的无监督学习可以实现对缺陷图像的重建,利用重建图像与原始图像做差得到的结果,再进行优化处理可以实现检测任意缺陷。但目前只能用于简单统一的纹理表面缺陷检测,对于复杂表面的细微缺陷还无法实现高准确度的检测。因此本文针对负样本数据难以收集,图像校对准确度要求高的特点,提出了一种DCGAN网络缺陷检测框架,用于实现印刷的细微缺陷检测。
与原始的DCGAN相比,本文在以下3个方面做出了改进。第一,为了减少上采样中的损失,在DCGAN的解码过程中增加上采样模块,模块内是使用两种方式上采样,然后取两种上采样结果的平均值。第二,提出了一种自注意力机制,加入阈值分割,提高目标区域的注意力权重,从而使得网络可以生成结构性更为复杂和细节更为准确的图像。第三,统计分析生成器生成图像的噪声分布,确定最佳阈值,去除噪声,获得缺陷图像。提高了检测精度。完整的流程如图1所示。
2 方 法
2.1 DCGAN
基于GAN网络的无监督缺陷检测目前还无法检测细微缺陷,其关键点在于GAN网络生成的图像在细节处与原图还是存在差异。所以本文通过减少网络中特征提取的损失,得到与原图差异更小的生成图,做到比之前的细微检测更好的效果。
DCGAN是对Goodfellow在2014年提出的原始GAN的一种改进。DCGAN网络把卷积网络引入到生成模型中,利用卷积网络强大的特征提取特性,提高了生成网络的学习效率。DCGAN和GAN的原理一样,都是生成对抗模型。相比于GAN网络做了以下几点改进:①在生成网络中使用转置卷积(transposed convolutional layer)来进行上采样,鉴别网络中使用加入stride的卷积替代池化层;②除了网络的输入层,其他层全部使用了批量归一化(batch normalization),使用BN可以稳定学习,有助于在更深层的模型中实现梯度流;③去掉全连接层,使网络变为全卷积网络。增加了模型的稳定性;④生成网络中使用ReLU作为激活函数,最后一层使用tanh;⑤鉴别网络中使用LeakyReLU作为激活函数。
基于DCGAN网络中的图像检测框架。训练阶段,先训练GAN网络,获得一个可以修复缺陷图像的生成网络模型。将一维数据生成出一幅图像,再交由鉴别器判断。当鉴别器无法分辨出生成图像与真实图像的区别时,生成模型训练完成。然后在检测阶段,对于待检图片,用生成模型對其进行修复,将修复前后的图像进行对比做差操作,就可以定位缺陷位置。Kun Ren[27]提出了一种基于LS-DCGAN的语义修复算法,通过DCGAN网络生成具有相似分布的损坏图像的图像来预测丢失的语义信息。
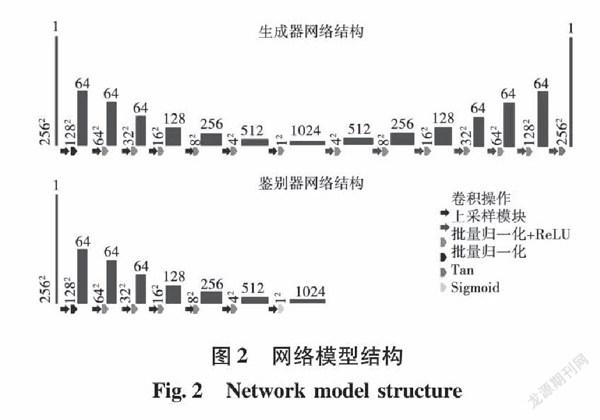
由于输入的是一幅未知缺陷的图片,而网络所需要的输入是一维噪声数据,所以需要先通过下采样将图片处理成一维数据。然后再输入给生成网络。具体网络结构见图2中生成器网络结构所示。下采样过程包含7层网络,每一层网络由一个卷积层、一个批量归一化层、一个ReLU层组成。其中卷积网络的卷积核大小为4,步长为2,填充为1。其中第一层不加ReLU层。
将生成的一维向量数据,输入给生成器,同样经过7层网络,每一层网络由一个反卷积层、一个批量归一化层、一个ReLU层组成。其中反卷积网络的卷积核大小为4,步长为2,填充为1。
鉴别器网络过程包含7层网络,每一层网络由一个卷积层、一个批量归一化层、一个ReLU层组成。其中第一层不加ReLU层,最后一层使用sigmoid函数进行判断。
DCGAN网络中的生成层,只采用一层反卷积操作,其结果是图像的细节部分修复之后不是很清晰。这对于后续的图像处理有很大影响,间接导致无法检测细小缺陷。所以我们在生成网络上采样过程中加入了上采样模块。模块内容是每一层使用两种不同方式进行上采样。分别为一次反卷积,一次2D最近邻上采样,然后取两次结果的平均值,获得最后的输出。该模块相当于取两次不同上采样的结合数据,防止上采样导致的信息流失和误差,可以进一步有效的细化图像的细节。使用不同的采样方式可以提取到不同的浅层局部图像特征,有助于纹理特征的提取,综合所有层次获得更好的重建效果,减弱外界因素的影响,更好的适应不同环境。上采样模块具体结构如图3所示。
2.2 自注意力机制
注意力机制(attention mechanism)模仿了生物观察行为的内部过程,即一种将内部经验和外部感觉对齐从而增加部分区域的观察精细度的机制。自注意力机制(self-attention mechanism)是注意力机制的改进,减少了对外部信息的依赖,更擅长捕捉数据或特征的内部相关性。
传统的编码器解码器框架有一个问题就是编码器需要将输入转化成一个固定长度的向量,将其传递给解码器。在转化向量过程中,会损失一些信息,而这些信息中有可能包含重要信息。本文力图在编码解码阶段可以把注意力放在一些重要区域,保留更多的有用信息,可以提升网络提取特征的能力。同时忽略重要性低的区域,节省网络计算力的消耗,减少时间。大多数用于图像生成的基于GAN的模型是使用卷积层构建的。卷积处理局部邻域中的信息,因此单独使用卷积层对图像中的长距离相关性建模在计算上效率低下。因此,将自我注意引入到GAN框架中,使得生成器和鉴别器都能够有效地对彼此分离的空间区域之间的关系进行建模。Zhang H[28]提出在GAN网络的基础上引入注意力机制,可以弥补只能通过邻近局部依赖生成近似图像的不足,实现了远程依赖关系建模,提高了对于细节部分的生成能力。
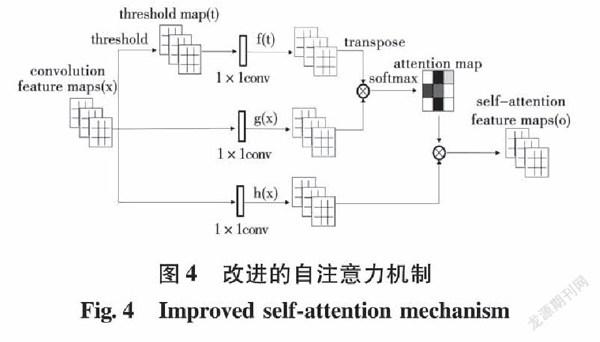
本文针对印刷品的缺陷检测问题,主要关注于印刷图案的边界。应用自注意力机制逐步抑制DCGAN编码路径中不相关背景区域的特征响应,而聚焦于印刷图案的边界,产生更具分辨性的特征表示。图4中引入的自注意力机制,x代表输入的特征图,f(t),g(x)和h(x)都是1x1卷积,差别在于输出通道大小不同。对特征图x做阈值分割获得分割图t,然后把分割图t作为卷积处理的输入,参与注意力图的计算,可以提高目标区域的注意力权重,获得更好的细节处理。通过三种卷积进行特征提取获得三个特征图。将f(t)的输出特征图转置,并和g(x)的输出特征图相乘,再经过softmax归一化得到一个注意图(attention map),最后用softmax计算每个事件的概率占所有事件概率之和的比例。因此该图表示了每个位置的重要性及注意程度。将得到的注意图和h(x)逐像素点相乘,得到自适应的注意力特征图。
卷積提取特征过程中会丢失一些数据,其中有可能包含缺陷信息。该过程可以自动注意重要部分的数据,利用所有位置的特征来帮助生成图片的某一细节,可以生成结构性更为复杂的图像。
2.3 去除噪声影响
阈值分割是一种传统的图像分割方法,这种方式利用图像中目标与背景在灰度值上的差异,把像素级分成若干类,从而实现目标与背景的分离。具体流程为:通过判断图像中每一个像素点的特征属性是否满足阈值的要求,来确定图像中的该像素点是属于目标区域还是背景区域,从而将一幅灰度图像转换成二值图像。阈值分割方法计算简单,可以形成闭合且边界不交叠的区域,在图像处理领域有着很好的普适性,通常情况下使用可以取得很好的结果。但是应对本文的情况,由于缺陷与特征有时会有同样灰度值,阈值分割效果不太理想。
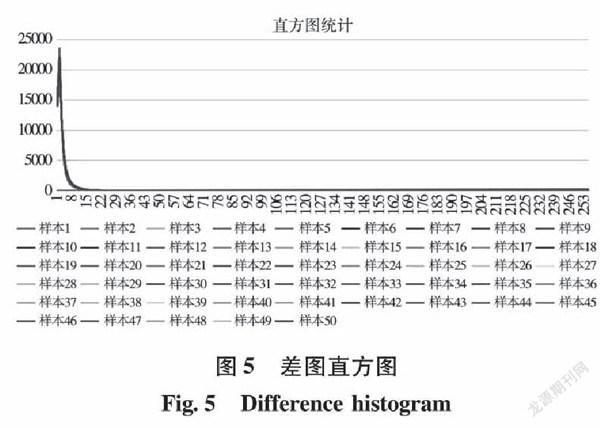
我们在生成图像与原图像生成的差图上定位缺陷,差图中会出现一些噪声,影响检测结果。这些噪声是因为生成器生成的图像与原图在某些区域存在微小差异,从而在差图上会产生噪声。所以为了保证检测结果的准确性,去除噪声十分重要。因为正样本可以排除缺陷的干扰,所以选择50张正样本图像。使用正样本图像与其对应的生成图做差产生差图,统计这些差图的直方图进行汇总比较。这里需要把灰度值转为整型,然后对两图灰度值相减的结果取绝对值,最后,我们利用直方图来显示噪声分布。通过多次实验,发现对于训练稳定的模型所产生的噪声存在一定的分布规律。如图5所示。
图5中x轴表示灰度值,y轴表示像素个数。从图中可以发现噪声有规律的集中分布在的坐标轴的左侧。这是因为生成图像与原图之间存在的差异肉眼无法分辨,所以计算出来的差值非常小,有的区域比原图灰度值更高,有的区域更低,取绝对值之后,数值会很小,所以会产生噪声的灰度值都分布在坐标轴的左侧。
为了去除噪声,我们通过选取20张无缺陷待检图像的差图,统计分析差图中的噪声分布,从而去除噪声,获得最终的缺陷图。步骤如下:
1)统计差图中灰度值的像素个数,灰度值为x,像素个数为y。
2)对x,y拟合曲线,获得噪声分布y=m(x)。
3)计算y=0时的x的最小值,即为噪声消失的x,设为阈值key。
4)差图利用key进行阈值处理去噪,获得最终缺陷图。
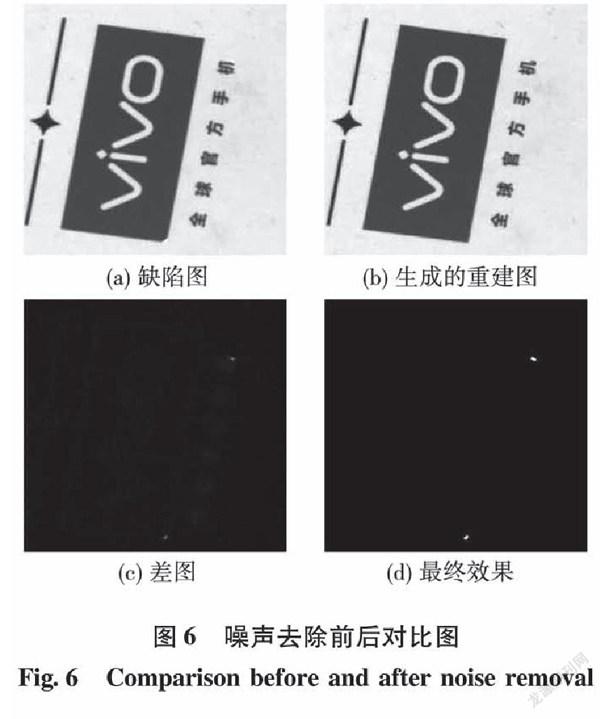
通过该方法可以得出一个理想阈值,通过阈值分割能够有效去除噪声,保证检测结果的准确性,从而满足实验要求。具体的实际情况可以参照图6。
图6(a)是带有缺陷的图片;(b)生成的重建图是使用本文网络生成的对应无缺陷图片;(c)差图是由重建图与缺陷原图做差产生的,其中不仅包含缺陷,还存在一些肉眼不可见的噪声,该噪声由于模型产生,所以符合模型的性能,稳定出现在每一张生成图片中;(d)最终效果图,我们通过统计分析噪声,确定噪声分布,然后去除差图中的噪声,来获得只含有缺陷的最终效果图。
3 实验结果
本节将展示本文算法的缺陷检测细微缺陷效果,以及改进DCGAN网络方法的一系列对比实验,并从准确率上对本文方法作评价。首先介绍实验数据准备和评价方法,然后设计DCGAN改进方法的对比实验。在本数据集上用本文提出的算法和其他改进网络检测效果进行对比,验证本文算法的有效性和高效性。
3.1 实验准备
本模型训练环境是基于ubuntu 16.04系统,配备NVIDIA GeForce RTX 2080显卡,算法基于pytorch框架实现。
3.1.1 数据准备和预处理
根据本文的实验目的,为了测试复杂环境下对于微小缺陷的检测结果。我们从1000张模拟工业环境下拍摄的清晰手机盒logo图片中选出200张作为数据集。
由于选用2592×1944的图片过大,所以对其提取ROI(region of interest,感兴趣区域),尺寸为635×330。为了适应网络训练,我们将图像分割成256×256大小的图片。如果不能正好分割,就将其中一部分重复分割。具体的分割结果如图7所示。
为了增加训练模型可用数据,我们在训练数据集上进行数据扩充,主要包括旋转、翻转等,最终得到3200张训练图像数据。
3.1.2 生成随机缺陷
我们使用随机生成的方式添加缺陷。步骤如下:
1)创建一个与原图大小一致的0矩阵。
2)根据图片大小及半径的范围随机生成一个位置,以该位置为圆心生成半径为R的圆。
3)提取圆的全部像素坐标,根据随机数从中确定出8个随机坐标。
4)利用8个坐标形成轮廓,再利用opencv中的凸包函数,生成随机缺陷。
5)重复步骤1)-4)随机生成1~5个缺陷,这样就可以实现缺陷的数量、位置与大小随机。
生成随机缺陷如图8所示。
3.1.3 损失函数
在DCGAN改进网络中,本文网络采用了BCEloss损失函数计算损失值,用于测量重构误差,误差最小时获得最优模型。损失函数为
loss(xi,yi)=-wi[yilogxi+(1-yi)log(1-xi)](1)
其中:i为训练样本;y为模型预测的类别概率;w为权重。
3.1.4 评价指标
为了评估模型对印刷图像的缺陷检测性能,我们主要采用准确率(accuracy)、灵敏度(sensitivity)、精度(precision)以及F1值作为评价指标。其中F1值同时考虑精确率和召回率,让两者同时达到最高,取得平衡。计算方式如下:
Acc=TP+TNTP+TN+FP+FN(2)
SE=TPTP+FN(3)
PC=TPTP+FP(4)
F1=2×PC×SEPC+SE(5)
式中:TP為真正例(true positive),真实标签和模型预测皆为无缺陷;TN为真负例(true negative),真实标签和模型预测皆为有缺陷;FP为假正例(false positive),真实标签为有缺陷而模型预测为无缺陷;FN为假负例(false negative),真实标签为无缺陷而模型预测为有缺陷。
3.2 实验结果及分析
3.2.1 对比实验
主要对比本文方法与DCGAN方法在检测细微缺陷大小的性能。制作缺陷大小分别为1-10像素10个类别的缺陷图像,总计1000张图片。对比方法有以下几种:其中原始方法(DCGAN),在原来网络的基础上只增加上采样模块,在原来网络的基础上只增加改进的自注意力机制,两者都增加的检测方法Our。
从图中可以看出,在5像素以上,两个方法都能够以较高的概率正确检测。但是5像素以下,本文方法相较于原DCGAN网络方法有明显提升。图10中的图片可以显示改进前后对于不同大小缺陷的检测结果。(a)为缺陷图片,(b)为原始的图片,(c)为DCGAN网络检测结果,(d)为只增加上采样模块的结果,(e)为只增加改进的自注意力机制的结果,(f)为我们融合两种方法的结果。其中对于后面三种方法都加入去噪处理,相较于改进之前,在大于5像素的缺陷检测中,效果差别不大。在检测缺陷面积小于5像素的图片中,(d)和(e)方法都有所提升,我们综合两种方法的结果可以检测细小缺陷,效果提升更好,准确率提高了10%。
3.2.2 缺陷检测对比实验
本节主要将本文算法(Our方法)与DCGAN方法(DCGAN)、用生成式对抗网络进行无监督异常监测方法AnoGAN[29],以及双重程序自动检测缺陷方法AMSDD[30],在本文实验数据上做对比实验。
实验结果如表1和图11所示,可以看出,与其他算法相比,本文引入了自注意力机制,增强了长距离像素间的相互影响,可以生成结构性更为复杂的图像。引入上采样改进模块,结合两次上采样结果,有效的保留了更多细节,可以获得更高的准确率。所以本文方法在Acc、PC、SE、F1等多项指标上的准确率更高。AnoGAN在其他方法中准确率最高,本文提出的方法相较于AnoGAN方法提高了2.4%。相较于改进之前的DCGAN提高了6.4%。综上所示,本文缺陷检测方法在准确率上具有优势。
4 结 论
本文提出了基于DCGAN网络的印刷缺陷检测方法。通过引入上采样改进模块,自注意力机制和使用统计方式确定分割阈值的方法,提高了检测精度和速度。首先在DCGAN的上采样过程中引入改进模块,结合两种卷积层提取的特征,以保留更多细节,减少信息丢失。其次,引入自注意力机制,利用所有位置的特征来帮助生成图片的细节,可以生成结构性更为复杂的图像。最后,学习生成器生成图像的噪声分布,确定最佳阈值,去除噪声,获得缺陷图像。试验结果表明,本文方法在缺陷检测方面具有较好的表现,相比于之前的方法在细小缺陷检测中可以提高检测精度。
参 考 文 献:
[1] HU B, WANG J. Detection of PCB Surface Defects With Improved Faster-RCNN and Feature Pyramid Network[J]. IEEE Access,2020,8:108335.
[2] ZHAO Z,LI B,DONG R,et al. A Surface Defect Detection Method Based on Positive Samples[C]// Proceedings of the Pacific Rim International Conference on Artificial Intelligence. Nanjing,China: Springer,2018: 473.
[3] MA B, et al.,The Defect Detection of Personalized Print Based on Template Matching[C]// 2017 IEEE International Conference on Unmanned Systems (ICUS),Beijing,2017.
[4] LI Y,ZHAO W, PAN J. Deformable Patterned Fabric Defect Detection With Fisher Criterion-Based Deep Learning[J]. IEEE Transactions on Automation Science and Engineering,2017,14(2):1256.
[5] CHA Y J,CHOI W,SUH G,et al. Autonomous Structural Visual Inspection Using Region-based Deep Learning for Detecting Multiple Damagetypes[J]. Computer-Aided Civil and Infrastructure Engineer-ing,2018,33(9): 731.
[6] ZHONG J,LIU Z,HAN Z,et al. A CNN-Based Defect Inspection Method for Catenary Split Pins in High-Speed Railway[J]. IEEE Transactions on Instrumentation and Measurement,2018,68(8):2849.
[7] TAO X,ZHANG D P,WANG Z H,et al. Detection of Power Line Insulator Defects Using Aerial Images Analyzed with Convolutional Neural Networks[J]. IEEE Transactions on Systems,Man,and Cybernetics: Systems,2020,50(4):1486.
[8] XUE Y,LI Y. A Fast Detection Method Via Region-based Fully Convolutional Neural Networks for Shield Tunnel Lining Defects[J]. Computer-Aided Civil and Infrastructure Engineering,2018,33(8): 638.
[9] DING R,DAI L,LI G,et al. TDD-net: A Tiny Defect Detection Network for Printed Circuit Boards[J]. CAAI Transactions on Intelligence Technology,2019,4(2): 110.
[10]HE Y,SONG K,MENG Q,et al. An End-to-end Steel Surface Defect Detection Approach Via Fusing Multiple Hierarchical Features[J]. IEEE Transactions on Instrumentation and Measurement,2020,69(4): 1493.
[11]LI Y,HUANG H,XIE Q,et al. Research on a Surface Defect Detection Algorithm Based on MobileNet-SSD[J]. Applied Sciences,2018,8(9): 1678.
[12]LIU Z,LIU K,ZHONG J,et al. A High-Precision Positioning Approach for Catenary Support Components With Multiscale Difference[J]. IEEE Transactions on Instrumentation and Measurement,2020,69(3): 700.
[13]ZHANG C,CHANG C C,JAMSHIDI M. Concrete Bridge Surface Damage Detection Using a Single-stage Detector[J]. Computer Aided Civil and Infrastructure Engineering,2020,35(4):389.
[14]WANG R,GUO Q,LU S,et al. Tire Defect Detection Using Fully Convolutional Network[J]. IEEE Access,2019,7:43502.
[15]YU Z,WU X,GU X. Fully Convolutional Networks for Surface Defect Inspection in Industrial Environment[C]// Proceedings of International Conference on Computer Vision Systems.Shenzhen,China: Springer,2017: 417.
[16]DUNG C V. Autonomous Concrete Crack Detection Using Deep Fully Convolutional Neural Network[J]. Automation in Construction,2019,99: 52.
[17]HUANG Y,QIU C,GUO Y,et al. Surface Defect Saliency of Magnetic Tile[C]// Proceedings of 14th International Conference on Automation Science and Engineering (CASE), Munich,Germany,2018: 612.
[18]LI S,ZHAO X,ZHOU G. Automatic Pixel-level Multiple Damage Detection of Concrete Structure Using Fully Convolutional Network[J]. Computer-Aided Civil and Infrastructure Engineering,2019,34(7): 616.
[19]MEI S,YANG H,YIN Z. An Unsupervised-learning-based Approach for Automated Defect Inspection on Textured Surfaces[J].IEEE Transactions on Instrumentation and Measurement,2018,67(6): 1266.
[20]HASELMANN M,GRUBER D P,TABATABAI P. Anomaly Detection Using Deep Learning Based Image Completion[C]// Proceedings of the 17th IEEE International Conference on Machine Learning and Applications (ICMLA). Orlando,Florida,USA,2018: 1237.
[21]KANG G,GAO S,YU L,et al. Deep Architecture for Highspeed Railway Insulator Surface Defect Detection: Denoising Autoencoder with Multitask Learning[J]. IEEE Transactions on Instrumentation and Measurement,2018,68(8):2679.
[22]YOUKACHEN S,RUCHANURUCKS M,PHATRAPOMNANT T,et al. Defect Segmentation of Hot-rolled Steel Strip Surface by using Convolutional Auto-Encoder and Conventional Image Processing[C]// Proceedings of the 10th International Conference of Information and Communication Technology for Embedded Systems (IC-ICTES). Bangkok,Thailand,Thailand,2019: 1.
[23]BERGMANN P,LOWE S,FAUSER M,et al. Improving Unsupervised Defect Segmentation by Applying Structural Similarity to Autoencoders[J]. arXiv Preprint arXiv:1807.02011,2018.
[24]YANG H,CHEN Y,SONG K,et al. Multiscale Feature Clustering-Based Fully Convolutional Autoencoder for Fast Accurate Visual Inspection of Texture Surface Defects[J].IEEE Transactions on Automation Science and Engineering,2019,16(3),1450.
[25]ZHAI W,ZHU J,CAO Y,et al. A Generative Adversarial Network Based Framework for Unsupervised Visual Surface Inspection[C]// Proceedings of the International Conference on Acoustics,Speech and Signal Processing (ICASSP). Calgary,AB,Canada,2018:1283.
[26]AKCAY S,ATAPOUR-ABARGHOUEI A,BRECKON T P. Ganomaly:Semi-supervised Anomaly Detection Via Adversarial Training[C]// Proceedings of the Asian Conference on Computer Vision. Perth,Australia,2018: 622.
[27]REN K,MENG L,FAN C, et al. Least Squares DCGAN Based Semantic Image Inpainting[C]// 2018 5th IEEE International Conference on Cloud Computing and Intelligence Systems (CCIS),Nanjing,China,2018:890.
[28]ZHANG H,GOODFELLOW I,METAXAS D N,et al. Self-Attention Generative Adversarial Networks[J]. arXiv: Machine Learning,2018.
[29]SCHLEGL T,SEEBOCK P,WALDSTEIN S M,et al. Unsupervised Anomaly Detection with Generative Adversarial Networks to Guide Marker Discovery[C]// International Conference Information Processing,2017: 146.
[30]TAO Xian,ZHANG Dapeng,MA Wenzhi,et al. Automatic Metallic Surface Defect Detection and Recognition with Convolutional Neural Networks[J]. Applied Sciences-Basel, 2018,8(9):1575.
(編辑:王 萍)
收稿日期: 2020-11-20
基金项目: 国家自然科学基金(61673142);黑龙江省自然科学基金(JJ2019JQ0013);哈尔滨市杰出青年人才基金(2017RAYXJ013);黑龙江省自然科学基金(F2017013);黑龙江省普通本科高等学校青年创新人才项目(UNPYSCT-2016034);黑龙江省教育厅科学技术研究项目(12511096);哈尔滨理工大学青年拔尖创新人才(20152);中国博士后基金(20132303120003).
作者简介:
王海涛(1980—),男,高级工程师;
高玉栋(1995—),男,硕士研究生.
通信作者:
陈德运(1962—),男,博士,博士研究生导师,E-mail:chendeyun@hrbust.edu.cn.
3297501908261
猜你喜欢
无线互联科技(2017年12期)2017-07-18
科学与财富(2017年18期)2017-07-09
科技创新与应用(2017年17期)2017-06-16
数字技术与应用(2016年12期)2017-04-15
现代电子技术(2017年5期)2017-04-01
数字技术与应用(2016年10期)2017-04-01
科技创新与应用(2017年7期)2017-03-27
中国高新技术企业(2016年34期)2017-02-10
计算技术与自动化(2016年4期)2017-01-11
科技视界(2016年3期)2016-02-26
