
一种基于迁移学习的城市内涝识别方法研究
2021-03-10 00:37:24李芬
河南科技 2021年28期
李芬






摘 要:为了有效解决目前获得城市内涝深度方法存在的问题,本研究采用迁移学习的方法对城市内涝深度进行监测。以卷积神经网络为基础,通过将提取的特征向量集和标注内涝深度的数据集输入LASSO模型中进行训练,计算出城市内涝深度。同时,以江西省南昌市近5年来内涝图片数据为例进行实证检验。结果显示,该方法预测结果与真实的内涝水位偏差较小,与实际内涝发生情况的吻合程度较高。因此,该方法能有效识别城市内涝的真实情况,对应对频发的城市洪水灾害问题具有重要意义。
关键词:迁移学习;城市内涝;卷积神经网络;图像识别
中图分类号:TP18;TU992 文献标识码:A 文章编号:1003-5168(2021)28-00-04
Abstract: In order to effectively solve the problems existing in the current methods of obtaining urban waterlogging depth, this study uses the migration learning method to monitor the urban waterlogging depth. Based on the convolution neural network, the urban waterlogging depth is calculated by inputting the extracted feature vector set and the data set labeled waterlogging depth into lasso model for training. At the same time, take the waterlogging picture data of Nanchang in recent 5 years as an example for empirical test. The results show that the deviation between the predicted results and the real waterlogging water level is small, and the coincidence degree with the actual waterlogging is high. Therefore, this method can effectively identify the real situation of urban waterlogging, and is of great significance to solve the problem of frequent urban flood disasters.
Keywords: transfer learning;urban waterlogging;convolutional neural network;image recognition
近年來,城市洪水已经成为全球范围内最频繁和最严重的城市灾害之一。目前,城市洪水深度提取的方法主要有水位传感器、遥感影像等。丁志国、秦玉忠、丁妙增、屠佳佳研究了水位传感器对洪涝检测的效果,结果显示,由于水位传感器费用较高,能够检测的内涝点数量有限[1-4],很难准确获得覆盖城市范围的洪水深度。郭欣怡、张红萍、路京选、徐宗学研究了遥感影像在城市内涝监测中的应用情况,结果显示,基于卫星的遥感图像受云层和植被影响,分辨率往往较低且数据样本有限[5-8]。因此,有必要研究其他潜在的数据来源。而从市民拍摄的一些图像中提取城市洪水深度信息是一种有潜力且经济有效的方法,可以作为现有方法的补充。从图像中提取城市内涝深度信息可以定义为一项计算机视觉任务,处理流程与分类、目标检测、分割等计算机视觉基本任务类似,提取图像中的特征向量是处理流程中的关键步骤[9]。
迁移学习是一种机器学习方法,是把为任务A开发的模型作为初始点,重新使用在为任务B开发模型的过程中[10]。例如,利用迁移学习从卫星图像中提取特征向量,然后建立特征向量与缺陷值间的回归模型。基于迁移学习得到的特征向量从图像中提取城市洪水深度具有很大的潜力。笔者提出一种利用迁移学习从图像中提取城市洪水深度信息的方法。
1 方法概述
基于迁移学习的城市洪水深度识别方法主要由训练阶段和测试阶段组成,其过程如图1所示。在训练阶段,将迁移学习模型作为特征提取器,从图像中提取特征向量;然后,根据提取的特征向量和相应的观测深度值训练回归模型。在测试阶段,使用与训练阶段相同的迁移学习模型从测试集中提取特征向量,然后将这些特征向量输入回归模型,训练回归模型,计算城市内涝深度。
2 内涝深度的识别
为了对城市内涝的深度进行识别,首先需要从训练集或测试集中提取特征向量,将原始图像转换为高级抽象特征。然后,在训练阶段,将提取到的特征向量和实际标注的内涝深度输入回归模型中进行训练。之后,在测试阶段,将得到的特征向量输入经过训练的回归模型中,计算图片的内涝深度。
2.1 训练集中特征向量的提取
从训练集或测试集中提取特征集(含特征向量的相应集合)需要经过特征提取器,而本文用到的特征提取器为预先训练好的卷积神经网络(Convolutional Neural Networks,CNN)[11]。迁移学习方法首先使用此卷积神经网络来初始化网格参数,同时固定某些层的神经元初始值,然后对大量的训练集进行特征提取。本文中选用的Incepiton V3是一个基于ImageNet的预训练卷积神经网络,从图像中提取相关特征。
Incepiton V3的体系结构如表1所示。首先将图像调整为299×299像素,然后将调整后的图像输入Incepiton V3的第一层,通过特定的操作提取特征。接下来,每一层将前一层提取的特征作为输入,得到更复杂的特征。在这些层的操作之后,Incepiton V3可以将原始图像转换为高级抽象特征,用于分类、归类等。
首先固定层与层之间的权重,同时去掉最后一个全连接层(线性层)及Softmax层,然后将其余的部分固定作为特征提取器,那么最后结果输出的是2 048维度的特征向量。最终从训练集中得到的特征向量集是这个2 048维度的向量。
2.2 内涝深度的计算
将利用Incepiton V3提取的特征向量集输入套索算法(Least Absolute Shrinkage And Selection Operator,LASSO模型)中进行训练[12]。该方法通过构造一个惩罚函数得到一个较为精炼的模型,使其压缩一些回归系数,即强制系数绝对值之和小于某个固定值,它是一种处理具有复共线性数据的有偏估计方法。LASSO回归模型更适合特征数大于样本集这样的场景。
LASSO回归模型如式(1)所示:
式中:xi(i=1,2,...,n,其中,n为样本数)表示特征;yi(i=1,2,...,n,其中,n为样本数)表示预测量;β0表示截距;βj(j=1,2,...,p,其中,p为代表特征数)表示第j个特征的回归系数;γ是惩罚系数。LASSO回归模型经转换后可由式(2)表示:
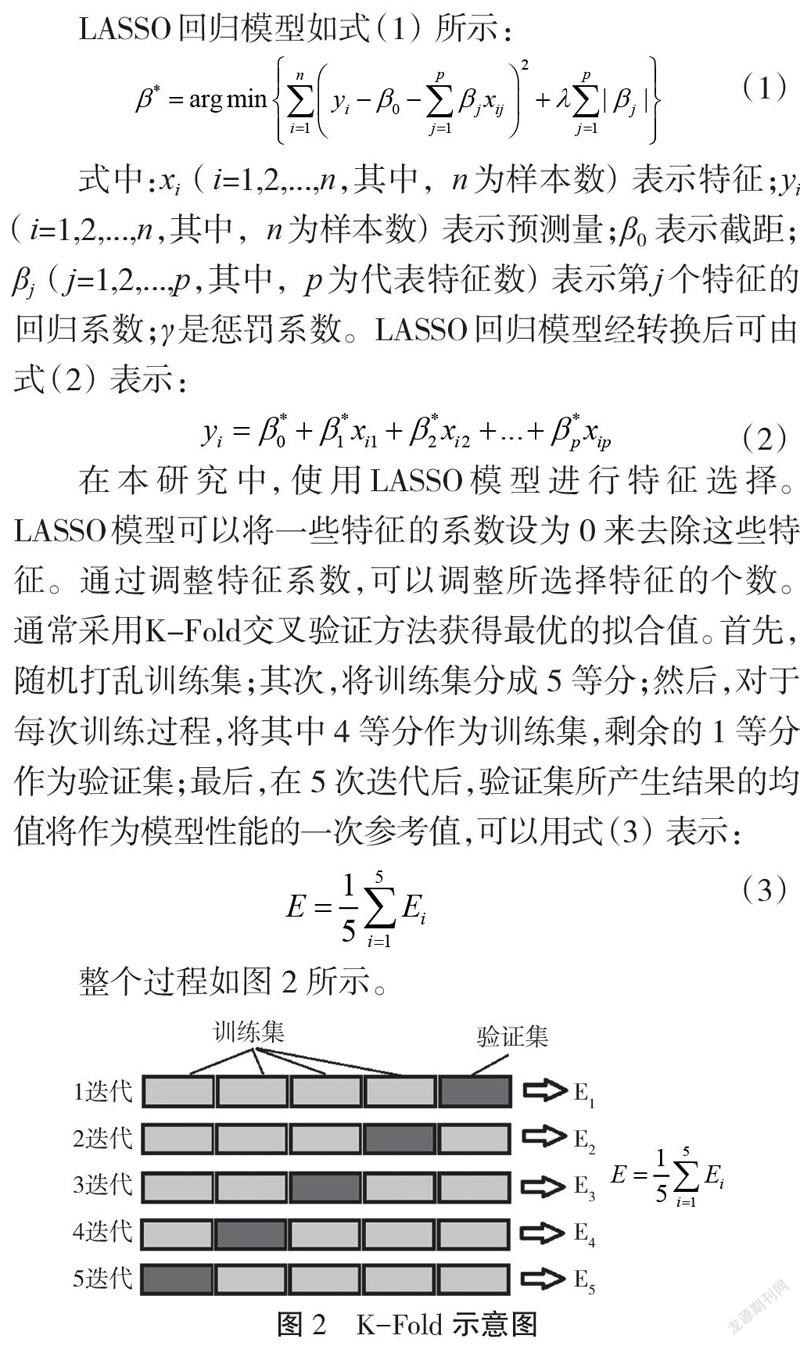
在本研究中,使用LASSO模型进行特征选择。LASSO模型可以将一些特征的系数设为0来去除这些特征。通过调整特征系数,可以调整所选择特征的个数。通常采用K-Fold交叉验证方法获得最优的拟合值。首先,随机打乱训练集;其次,将训练集分成5等分;然后,对于每次训练过程,将其中4等分作为训练集,剩余的1等分作为验证集;最后,在5次迭代后,验证集所产生结果的均值将作为模型性能的一次参考值,可以用式(3)表示:
整个过程如图2所示。
在训练阶段,先用Incepiton V3得到的特征向量(作为X)和内涝深度(作为Y)来训练LASSO模型;在测试阶段,将Incepiton V3得到的特征向量输入经过训练的LASSO回归模型中,计算图片的内涝深度。
3 研究案例
为了训练和测试回归,需要创建内涝深度数据集,该数据集需要集合大量的内涝深度数据,也可以手动对图片进行标注。标注的数据又分为标注对象和标注环境。标注环境分为不同程度的内涝雨天,且需要没有降水的天气图片。标注对象应该包括一些参照物,如人行电线杆、防撞桶、栏杆、车辆等。通过比较参考对象在淹水期和非淹水期的高度,可以估算出淹水深度。
3.1 数据集
为了研究和评估该技术的可行性,采集了过去5年来南昌市内涝的图片,图3和图4是数据集的一部分。其中,图3显示的城市内涝图片中车为主要参照物,将其作为图集1;
图4显示的城市内涝图片中人为主要参照物,将其作为图集2。这些图片的原始像素是1 280×720。Incepiton V3会将其转换为299×299像素规格。每个图片都标注了内涝深度。
3.2 结果模拟
将所有图片分成两部分,即测试集和训练集(含验证集)。其中,测试集仅用于评估回归模型的性能,不用于训练和验证;训练集按照图2所示的5次迭代训练法进行训练。采用LASSO回归模型,对以上两个图集进行训练,得到其对应的性能指标,如表2所示。
3.2.1 图集1的内涝深度预测。实验组收集了85个样本来训练LASSO模型,同時使用20折交叉验证的方法,最终得到的λ值是0.000 735,其中有效特征数为49个。在训练阶段,模型的R2和RMSE指标分为是0.94和0.015;在测试阶段,对应的R2和RMSE分别为0.75和0.031。
图5是图集1真实样本与预测值的结果。其中,实线部分为真实内涝水位,圆点为训练模型的预测结果,方点为测试模型的预测结果。总体来说,预测结果表现良好,符合预期。
3.2.2 图像2的内涝深度预测。对于图像集2,收集了148个样本来训练LASSO模型,同样使用20折来对其进行训练,获取的最佳λ为0.000 821,同时有42个特征被选中。在训练过程中,对应的R2和RMSE分别为0.98和0.025;在测试阶段,对应的R2和RMSE分别为0.98和0.033。
图6是图集2真实样本与预测值的结果。其中,实线部分为真实内涝水位,圆点为训练模型的预测结果,方点为测试模型的预测结果。
表2数据及拟合图(图5、图6)显示,内涝图片中以车为主要参照物的场景采用该模型,其内涝深度的观测值同真值之间的偏差更小;而内涝图片中以人为主要参照物的场景,其预测结果与实际发生情况的吻合程度更高。
4 结语
通过以上案例可以发现,无论内涝图片中以车为主要参照物,还是以人为主要参照物,其对应的预测结果与真实内涝水位均具有良好的匹配程度。因此,本文中提出的迁移学习的城市内涝识别方法具有良好的内涝识别效果,能有效解决目前获得城市内涝深度方法存在的问题。
参考文献:
[1]丁志国,龚占龙,盛智勇.FBG传感器在排水管道水位实时监测中的应用[J].河北农机,2021(7):52-53.
[2]秦玉忠,吴银成,黄春,等.城市道路积水监测用超声波水位传感器研究[J].自动化与仪器仪表,2021(3):101-104.
[3]丁妙增,陈爱莲.水位观测仪探析与改进[J].浙江气象,2020(4):44-48.
[4]屠佳佳,沈冰,张永超.基于液面检测传感器的水位自动监测系统研究[J].浙江水利科技,2021(5):76-79.
[5]郭欣怡,赵双明.利用Sentinel-1/2融合影像分析城市内涝[J/OL].(2021-10-25)[2021-11-09].https://kns.cnki.net/kcms/detail/detail.aspx?dbcode=CAPJ&dbname=CAPJLAST&filename=CHXG20211025000&uniplatform=NZKPT&v=LiHL004B3v4muKKy9fk1kaKikWOVk4dxuEe9YQ0AhDIOoHlnjHdg_o3fvR_Oimw2.
[6]张红萍.基于遥感技术的城市洪涝灾害承载力评估模型研究:以武汉市为例[D].武汉:中国地质大学,2020:1-155.
[7]路京选,李小涛,李琳,等.台风暴雨洪涝灾害全链路遥感动态监测方法与示范[J].卫星应用,2019(11):23-28.
[8]徐宗学,程涛,洪思扬,等.遥感技术在城市洪涝模拟中的应用进展[J].科学通报,2018(21):2156-2166.
[9]郑远攀,李广阳,李晔.深度学习在图像识别中的应用研究综述[J].计算机工程与应用,2019(12):20-36.
[10]庄福振,罗平,何清,等.迁移学习研究进展[J].软件学报,2015(1):26-39.
[11]曲景影,孙显,高鑫.基于CNN模型的高分辨率遥感图像目标识别[J].国外电子测量技术,2016(8):45-50.
[12]柯郑林.Lasso及其相关方法在多元线性回归模型中的应用[D].北京:北京交通大学,2011:1-40.
3701500338252
猜你喜欢
知识管理论坛(2016年6期)2017-05-27 19:44:03
振动工程学报(2017年1期)2017-04-21 10:24:46
计算机应用(2016年12期)2017-01-13 20:26:21
现代商贸工业(2016年25期)2016-12-26 17:40:43
科技创新与应用(2016年33期)2016-12-17 14:47:27
软件导刊(2016年9期)2016-11-07 22:20:49
软件工程(2016年8期)2016-10-25 15:47:34
科技视界(2016年24期)2016-10-11 13:14:37
科教导刊·电子版(2016年13期)2016-06-28 21:26:07
电脑知识与技术(2016年10期)2016-06-16 21:27:26
